Ti毫米波学习笔记---测角
前言
前几篇笔记,我们已经介绍了沿速度和距离两个维度进行感应,本篇文章介绍沿着雷达第三个维度角度进行分析。在说明角度测量原理之前,我们先提出几个问题?
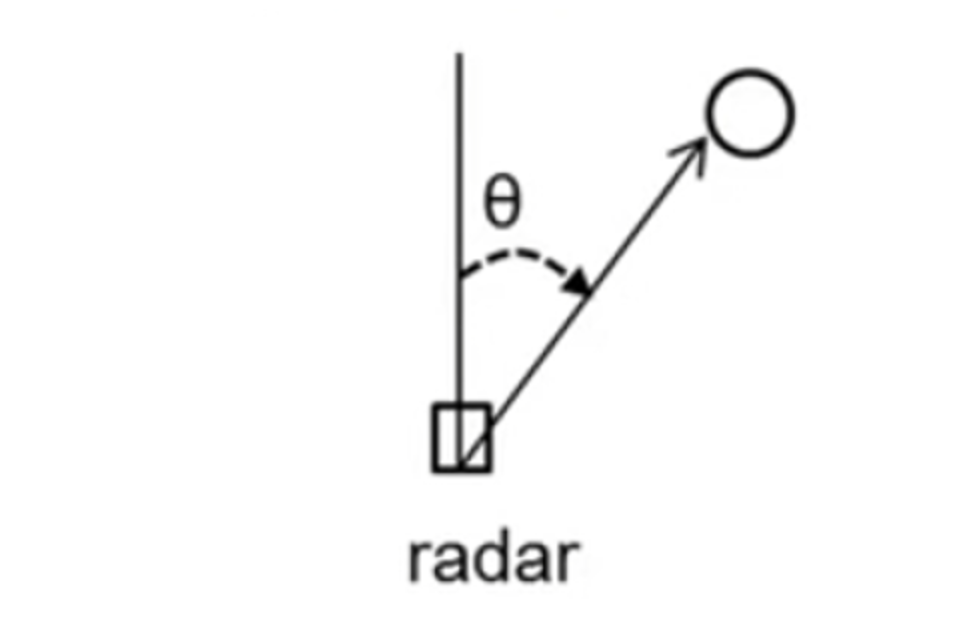
- How does the radar estimate the angle of arrrival of an object in the front of the radar?在雷达前方存在一个物体,雷达是如何估算物体的到达角?物体的模型如下图所示。
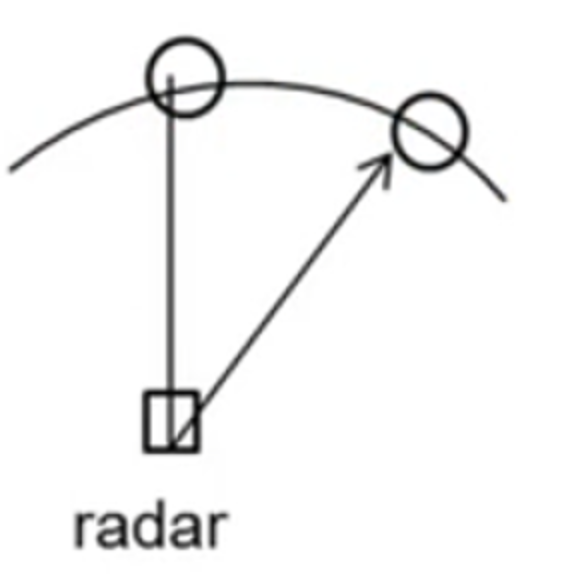
- What if there are multiple object at different angles? 在不同的角度存在多个物体,但可能具有相同的距离和相同的相对速度,会怎么样?
- What determines the maximum field of view? 雷达的最大可测范围角是多少?由什么决定了?
到达角测量基础
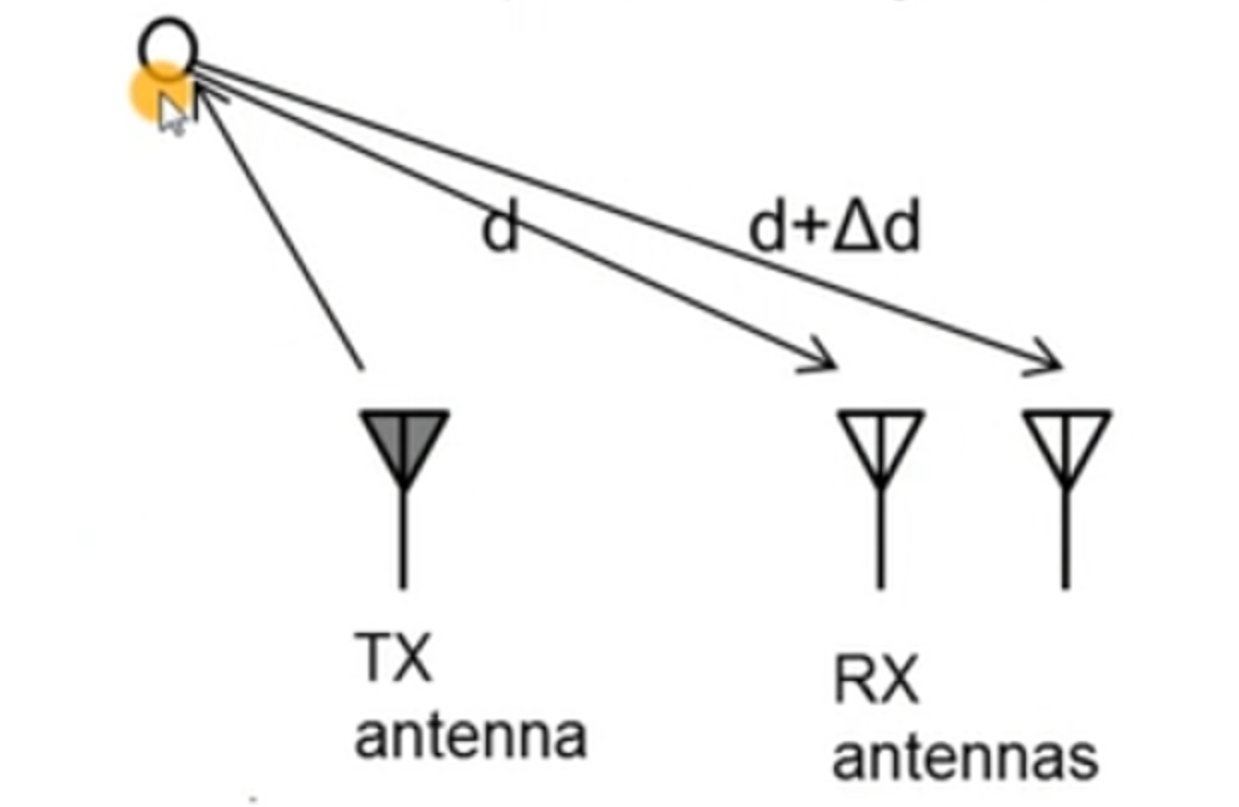
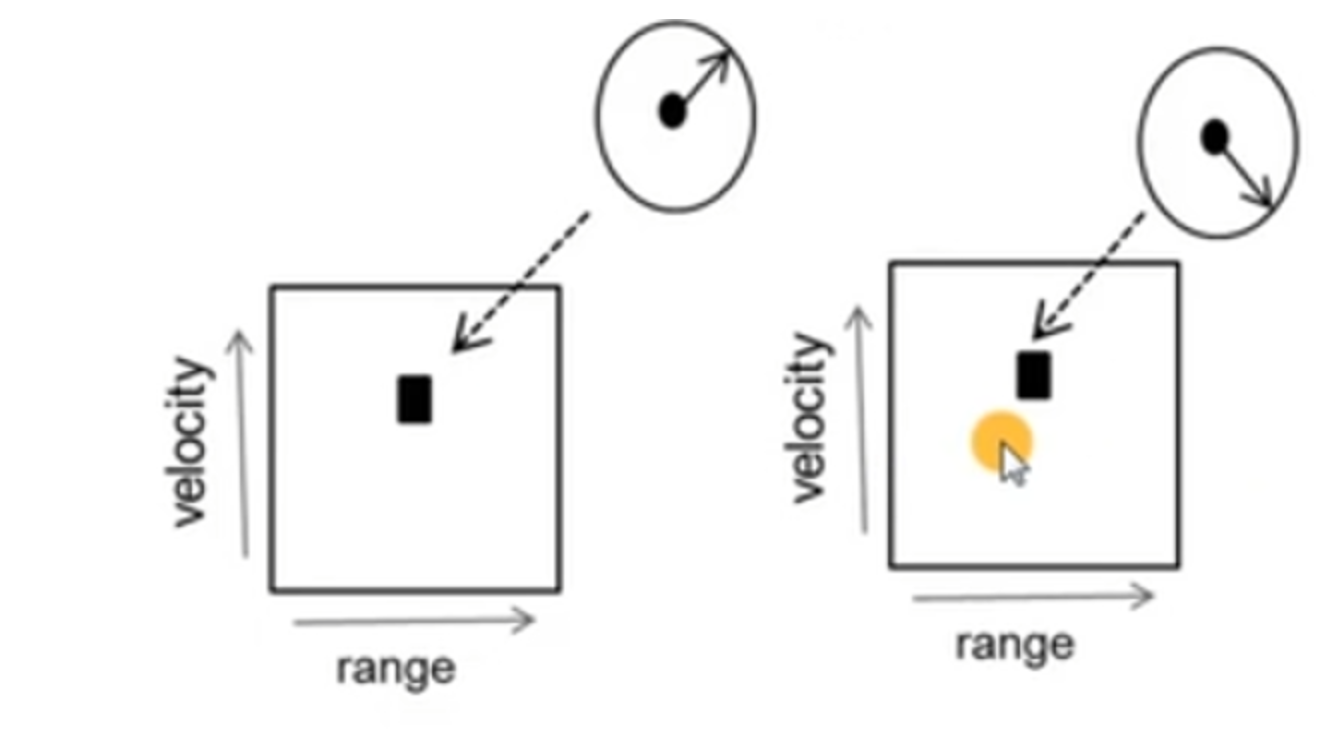
回忆之前的笔记,我们在讨论雷达测速原理时,得出一个重要的结论:中频信号的相位对物体的距离的微小变化十分敏感。当距离变换\(\Delta d\)时 \(\omega = \frac{4\pi \Delta d}{\lambda}\),角度估算利用相同的原理,角度估算需要至少2个RX天线。这里是利用物体相对于雷达天线的差分距离,过程如下图所示。由于接受天线存在一个距离,所以接收信号到达雷达的 距离存在一个\(\Delta d\)的差异,所以两个天线之间的中频信号的相位差为\(\omega = \frac{2\pi \Delta d}{\lambda}\),至于为什么分子的系数为2而不是4,那是因为只有发射回来的单程路径存在一个\(\Delta d\)的距离差。
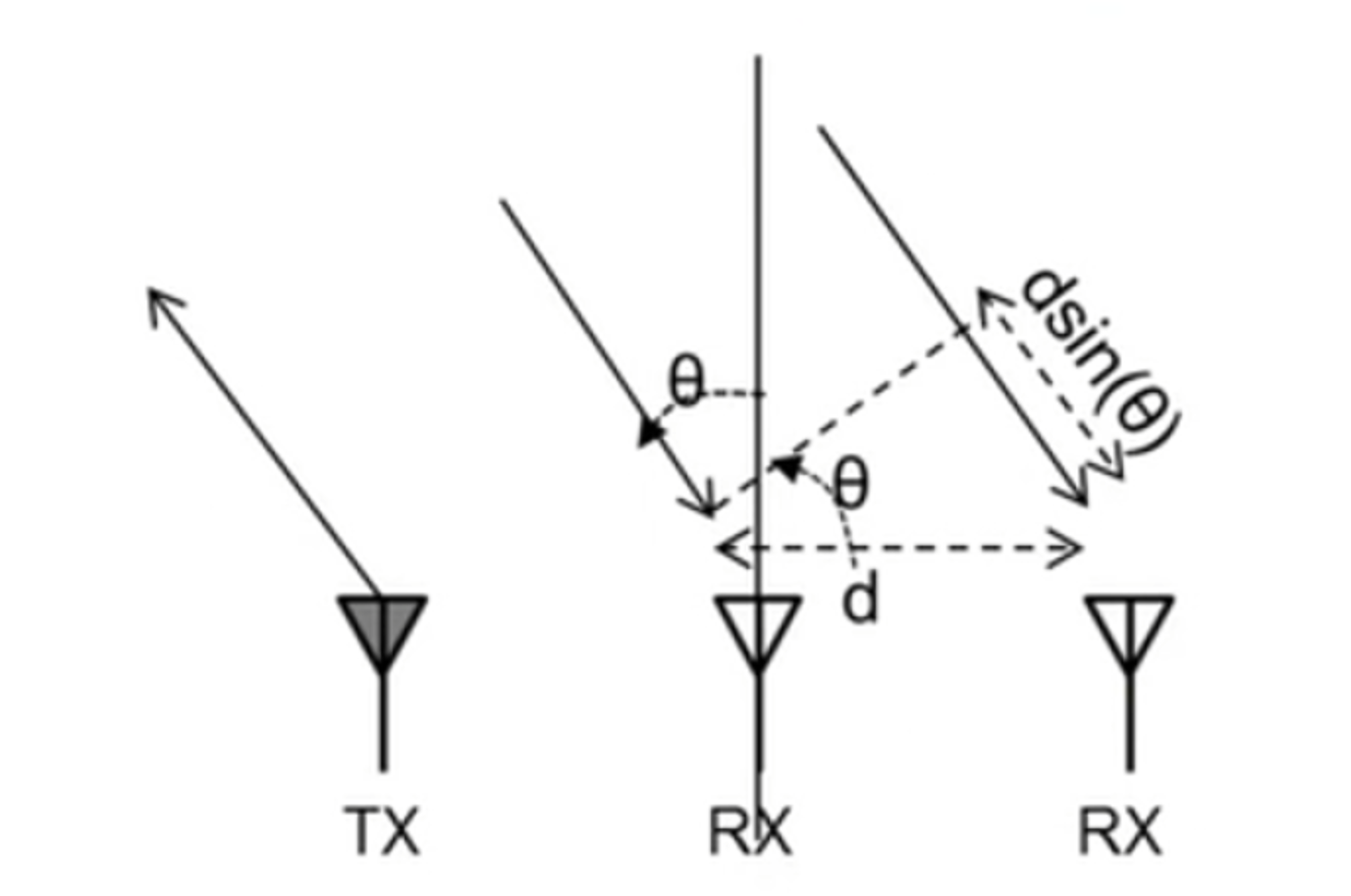
那这个距离和物体于雷达的角度存在什么样的关系?我们将雷达和物体的角度关系和变化的距离关系画出,如下图所示。在下图我们是假设雷达之间的距离为\(d\),则接受信号到达雷达的两个接受天线的距离差公式为\(dsin(\theta) => \theta =sin^{-1}(\frac{\lambda \omega}{2 \pi d})\)。
在数据上我们天线1的中频信号做2D-FFT处理和天线2的中频信号做2D-FFT处理对比相同位置的谱峰的相位差。
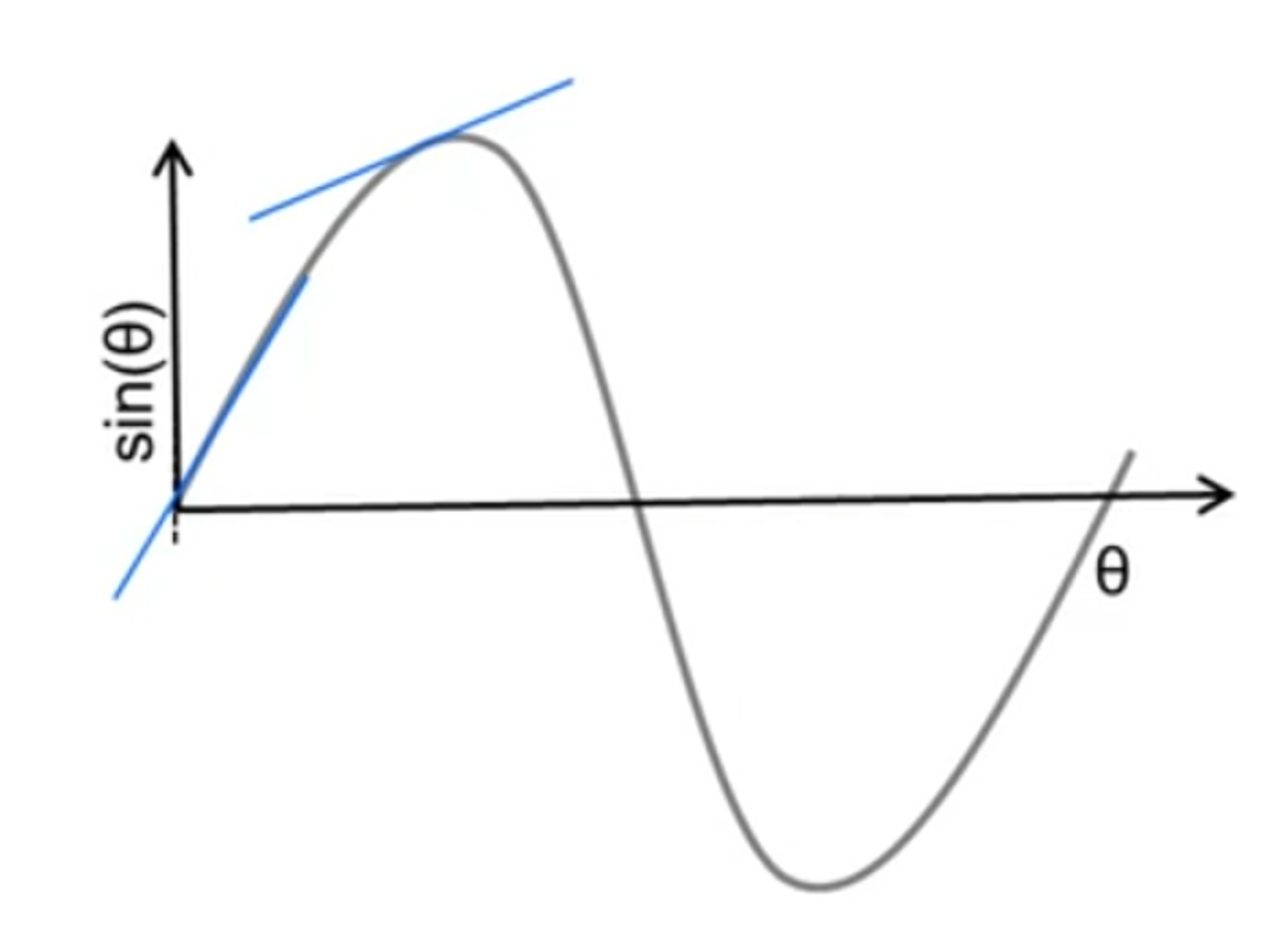
下面我们分析角度的测量公式\(\omega = \frac{2\pi \Delta d}{\lambda}\),可以很明显的知道,两个天线的对应谱峰的相位差和物体的雷达不是线性关系,\(\omega\)和\(\theta\)的关系如下图所示,我们回想一下,在测速笔记中,相位和物体的速度是线性关系的,在测距笔记中频信号的频率和距离是线性关系,而在测角中相位和角度不是线性关系而是\(sin(\theta)\)的关系。在\(\theta\)接近于0时,\(sin(\theta)\)对\(\theta\)十分的敏感,而\(\theta\)接近90°时,\(sin(\theta)\)对\(\theta\)的变化非常不敏感。这说明,当物体在雷达正前方时,物体对雷达的角度测量效果十分好,但是当物体逐渐增加并且接近90°,当然由于噪声,估算角度的准确性会下降。
在测速那个笔记中,我们计算出雷达的速度存在一个最大不模糊的速度,那么雷达的角度测量是否也相同存在一个最大不模糊的角度了?和计算最大不模糊速度相同。不模糊的最大相位差\(|\omega| < 180°\),所以\(\omega = \frac{2\pi \Delta d}{\lambda} < \pi\)
\(\theta<sin^{-1}(\frac{\lambda}{2d})\) ,所以最大不模糊角度取决于接收天线之间的距离。
现在思考一个问题,如果在雷达前方存在两个物体,两个物体离雷达的距离相同并且速度也相同。上诉的方法还可以识别出两个物体的角度吗? 答案是否定的,对于两个天线而言,只能区分一个距离一个速度的上的一个物体角度,如果需要同一距离同一速度上的不同的角度则需要大于2的接收天线。
角度分辨率
角度分辨率的定义:两个物体的到底角分别位于\(\theta\)和\(\theta+\Delta \theta\),那么当两个物体的角度差差异多少时,可以将两个物体的角度在角度FFT的谱峰中区分的出来,这就是角度分辨率的定义。
在之前的分析中,我们有一个结论,到达角为\(\theta\)的物体具有离散频率\(\omega\),它为\(\frac{2\pi sin(\theta)}{\lambda}\)并且\(\omega > \frac{2\pi}{N}\),\(N\)为FFT中的采样的样本数,所以我们可以进行如下的推导。
其中\(N\)是天线的数量,\(d\)是两个连续天线之间的距离,所以在上面的推导的公式可以得到\(\theta_{res} = \frac{\lambda}{Ndcos(\theta)}\),实际中天线和天线之间的距离为\(\frac{\lambda}{2}\)而\(\theta = 0\),所以角度分辨率为\(\theta_{res}=\frac{2}{N}\) ,需要注意的一点是,这里的单位是弧度制。
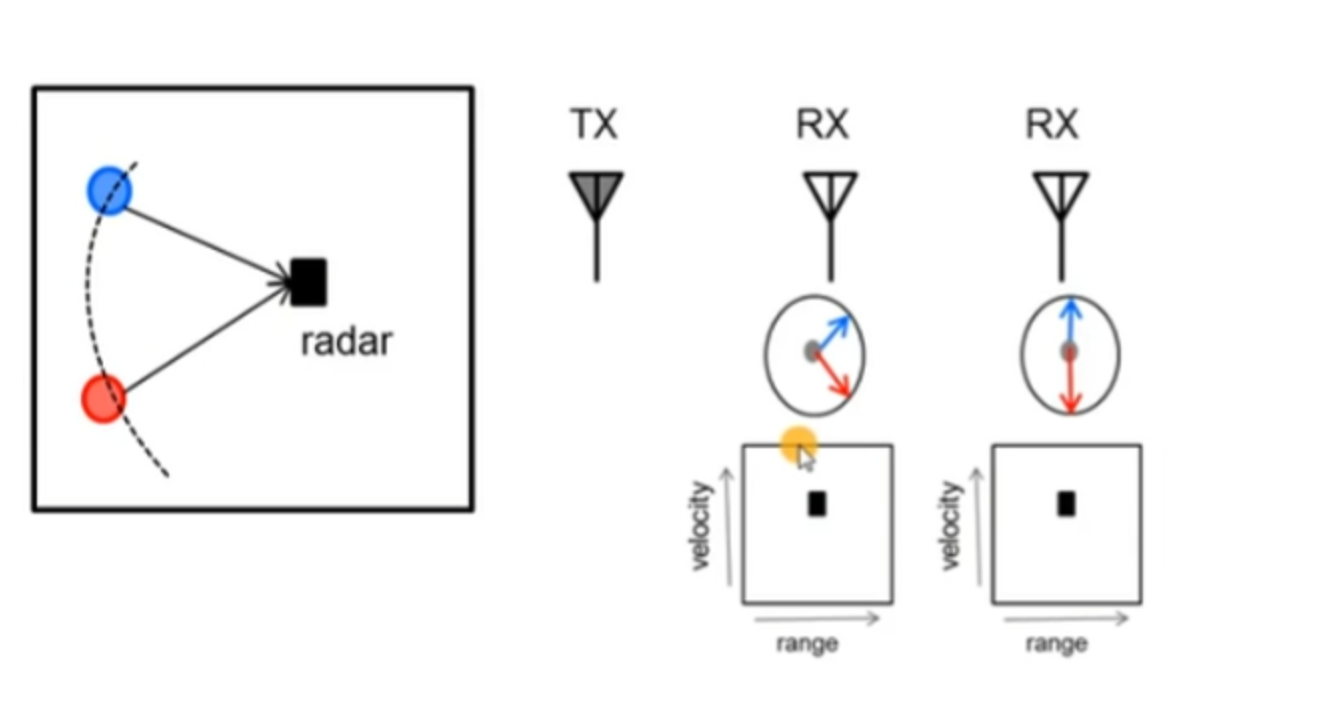
现在分析一下角度分辨率\(\Delta\theta > \frac{\lambda}{Ndcos(\theta)}\),在之前的笔记中,速度分辨和距离分辨率都是独立于速度和距离的变量。但是角度分辨率根据公式而言发现其和当前物体的角度是存在关系。其本质的原因在于\(sin(\theta)\)的不一致。所有对由\(\theta\)分隔的两个物体,其在角度FFT中的叫频率在\(\theta\)等于0,离的更远而随着角度的增加,两物体的角频率越来越近。如下图红色和蓝色两个物体,在\(\theta = 0\)处,两者角度差为\(\theta\),经过FFT后的角频率差的比较大,随着角度的移动,相同角度差\(\theta\),两者的角频率差越来越小。

下图是角度估算的过程。对于多个不同天线得到的信号进行速度FFT结果,然后在这些相同的2D-FFT谱峰进行FFT得到角度FFT,而角度FFT的谱峰就可以得到到达角。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号