Ti毫米波学习笔记---参数设置和雷达距离方程
前言
在之间的文章中已经分析FMCW雷达的测距和测速的理论知识,在了解这些知识后,我们便可以根据我们的功能的需求参数来设置我们的雷达的参数。本章先简单的说明了雷达参数的一些设置,并简单的说明关于了雷达方程的相关知识。
FMCW 2dFFT处理过程
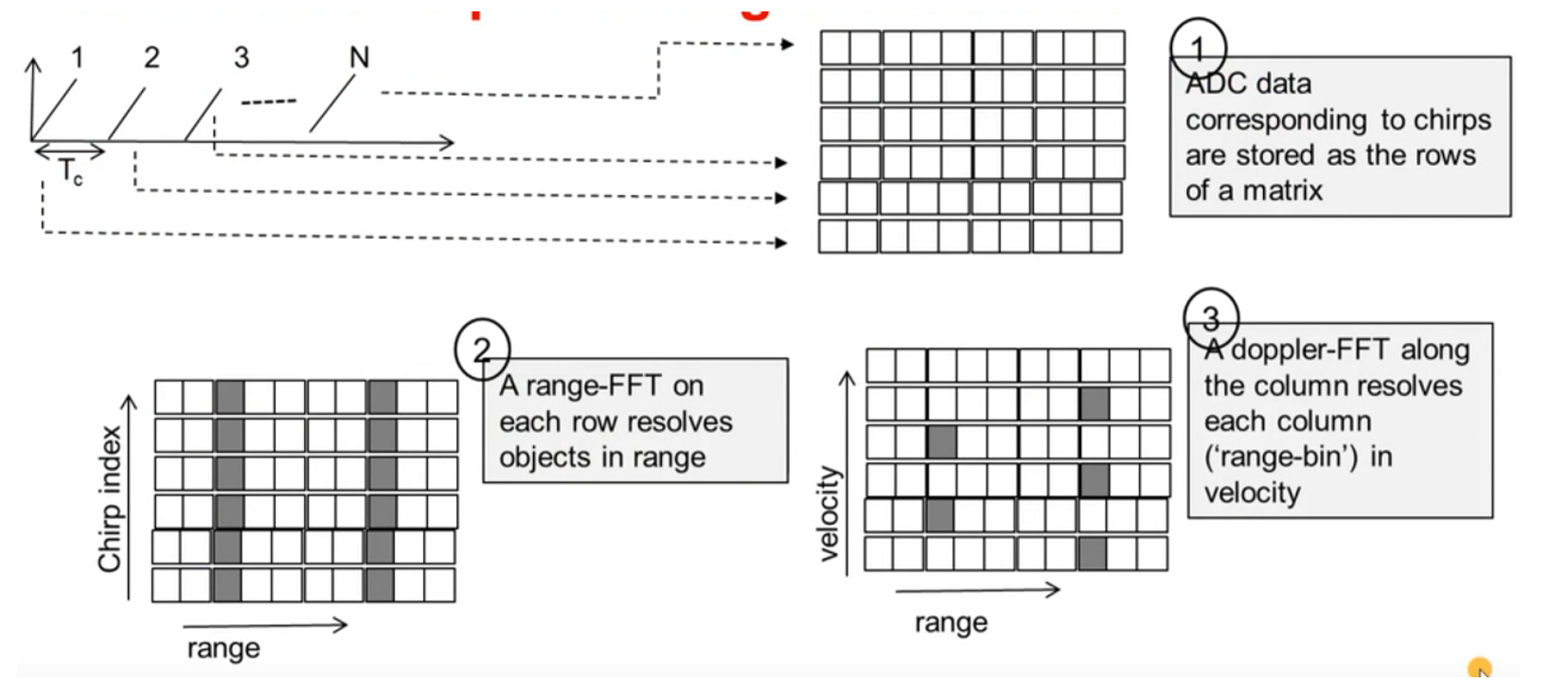
以上是经典的FMCW雷达测距和测速的过程,先对每一个chirp进行ADC采样M点,将每一个chirp的ADC采样数据存储在一行向量中,对于连续的N个chirp信号都进行相同的过程,这些数据将组成N*M的矩阵数据。对每一行进行FFT处理后可以得到距离相关的信息。如上图的第2幅图灰色的部分表示存在谱峰,每一个行存在二个谱峰说明在雷达的前方存在两个距离不相同的目标,在这一步已经区分在雷达前方距离不相同的物体的分离。接下去我们将每一列做FFT处理得到速度FFT结果如图3所示,通过第3幅图,我们可以区分在相同距离上速度不同的物体的进行分离,图中表示了在距离谱线3上存在两个速度不同的物体,在距离谱线8上存在3个不同速度的目标。
FMCW的参数公式
在之前的学习中,我们得到一些FMCW有关的参数,下面我将这些参数罗列在下面:
在我们知道雷达需要的\(v_{max}\),\(v_{res}\),\(d_{res}\) 和\(d_{max}\),我们来设置雷达所需要的参数,由上面的参数表示\(T_{c}\)与\(v_{max}\)呈反比关系,于是我们可以计算出\(T_{c}\)的数值,接的根据距离分辨\(d_{res}\)仅仅取决线性调频信号的带宽\(B\),所以可以根据距离分辨率来确定FMCW雷达的带宽。这里我们已经确定了雷达脉冲持续时间\(T_{c}\)和带宽\(B\),这意味了我们已经锁定了线性调频带宽的斜率\(S\),接下来帧时间\(T_{f}\)仅仅取决于速度分辨率,所以通过设置的速度分辨率我们可以计算出合适的\(T_{f}\)。到这里,一个帧的基本参数都设置完整了,但是还有一个距离最大值的关系还没有使用。这里的距离最大值和中频信号的最大值\(F_{if_{max}}\)呈正比,但是由于硬件设备的限制,有时候无法满足对中频信号的采样条件,这个时候要进行\(S\)个\(d_{max}\)的权衡取舍了。
限制条件
- 由于采样的ADC硬件的ADC的限制,可能没办法满足中频信号的带宽,这个时候就必须对采样斜率\(S\)和\(d_{max}\)进行取舍。
- 雷达能够产生的斜率\(S\),通常对于雷达的合成器产生的最大斜率\(S\)是存在限制。
- 对于一些雷达设备可能对于chirp和chirp信号之前的空闲时间还有一些特定的要求。
- 最后对于使用处理期间需要足够存储空间来存储采集的信号,因为对于多普勒FFT而言需要将所有的数据都存储后才可以得到,这说明需要处理器需要足够的存储空间来存放这些数据,对于低成本的MCU而言这一点有时候将是相当注意的一点。
最大距离和距离分辨之前的矛盾问题
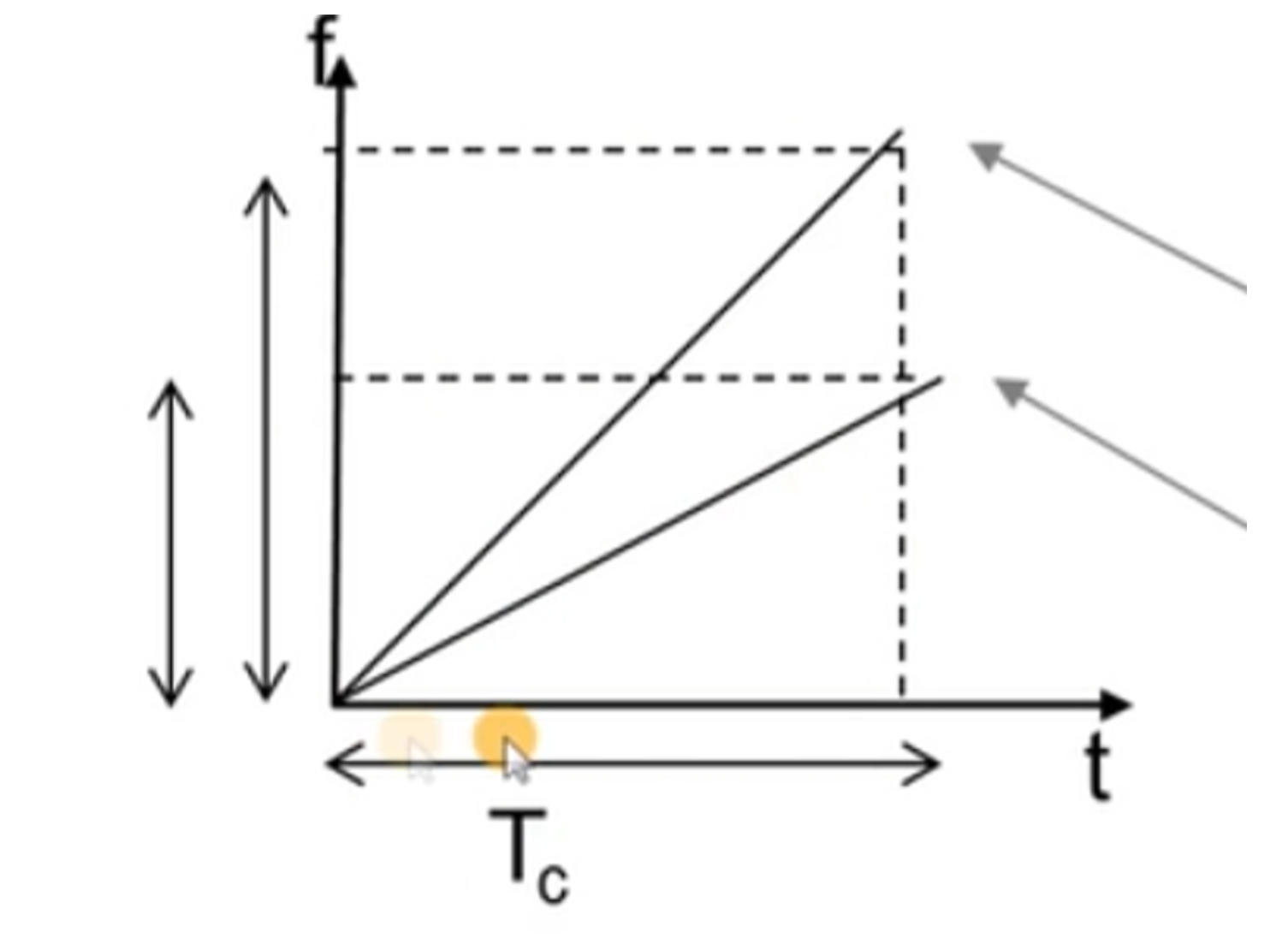
在之前测距笔记说明了这个问题,在设备选择完成和最大的速度确定下,雷达的斜率\(S\)和最大距离\(d_{max}\)成为了一个矛盾的参数,因为\(d_{max}\)越大说明了\(S\)越小,而较小的斜率意味了在相同的时间内跨越的带宽越小,换句话而言就是距离分辨率\(d_{res}\)越小。
雷达的距离方程
除了雷达的ADC的最大采样率将会限制雷达看的见的最远距离\(d_{max}\),还有一个决定雷达最大距离的重要因素,就是最大距离的物体反射的雷达信号的强度足够强以便可以被雷达检测到。接下去,我们分析一下雷达的信号强度取决于那些参数,首先在这里我们存在一个雷达设备,它正在输出\(P_{t}\)瓦的功率,该信号由发射器的天线发射,由于信号在不断的扩散开,其功率密度随着距离的平方的增加而不断的减少。那么这个辐射密度的表达式。
可以通过提高增益的天线来提高天线的增益,一般是提高天线的方向性来提高其增益,在更狭窄的地方聚信号的功率。这时上面的式子加入一个天线的增益\(G_{TX}\)。
除了发送天线的功率会影响信号的强度而言,物体对于发射信号的反射能力也会影响最后接受的信号的强度,我们设物体的雷达散射截面积RCS,RCS基本上是对雷达接收器的方向上的目标的反射雷达信号能力的度量。公式为:
接受天线对于信号的接收能力也会影响信号的强度,所以在上面的公式的情况下还乘以一个天线的接收有效捕获面积。
通过天线的理论得到\(A_{RX} = \frac{GRX\lambda^2}{4\pi}\),可以通过工作的波长写出孔径的影响。到目前为止我们得到雷达和距离有关的功率公式。但是雷达可以看到多远不知和功率有关还与雷达噪声能量有关,换句话说就是SNR。下面不加以证明给出SNR的公式。其中\(T_{meas} = NT_{c}\) \(k\)为玻尔兹曼常数,\(T\)为天线温度,\(F\)为雷达的保真系数,当温度提高后天线的SNR就降低,在一些高功率的天线的PCB设计中需要考虑天线散热的问题,保证雷达运行的稳定性。由于\(T_{meas} = NT_{c}\)所以SNR的有用信号随着观测时间的增加而提高,原因是随着观测时间我们可以观测到所需要的雷达信号和我们不需要的噪声信号,但是需要注意的一点是,雷达信号是确定信号而噪声信号是随机的信号,因此经过雷达处理算法后包括距离FFT,多普勒FFT后,有用的信号往往会前后一致的累加,而噪声部分往往会达到一个平均值,这也称之为处理增益。但是相同提高了观测时间同时也降低了系统的实时时,往往鱼和熊掌是不可兼得。
还需要注意的一点,雷达信号存在一个最小的SNR.在这里我们记为\(SNR_{min}\),这意味在距离-速度FFT图中,检测到其SNR低于该最小的SNR的任何目标将不认为有效目标,这个\(SNR_{min}\)通常根据雷达系统的设计人员来进行选择,俗称就是卡阈值。不过这个阈值的选择好坏将会影响错过检测的可能性和发出错误警报的概率。往往是需要在两者之间进行折中的。比如\(SNR_{min}\)选择较高的值,你获得错误的警报的可能将变低,当然你也可能错过一些正确的检测,反之也是相同的道理,最后我们得出一个理论的\(d_{max}\)的计算方程。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号