基于预计算的实时环境光照(Precomputed Real-time Environment Lighting)
环境光照(Environment Lighting):用于大型、复杂但强度较小的光源,包括天空光(Sky Light)和云散射的光、从场景中的超大型物体反弹的间接光照以及超大型 area light 的直接光照(往往是能包围整个场景的无限远的 area light)。这种光源具有物体位置无关的特性,即物体无论位于场景的哪里,所接受到的环境光照都是一样的(不考虑辐射度传输因素,例如几何相关的 visibility)。
其中,Ambient Light 是最简单的环境光照,相当于给整个场景所有物体提升同样的亮度(同一颜色)。
因为环境光往往是超大型的,而场景中物体相隔不远的情况下,就可以假设场景所有物体所受到的环境光是一样的,例如相隔一条街的物体能受到的天空光照几乎是一样的。当然考虑光的辐射度传输因素的话,不同物体所受到的环境光照将有所不同,但我们可以将其拆解成环境光信息和辐射度传输信息,环境光信息依然可以全场景共享,而辐射度传输信息可以每个物体各有一份。
基于图像的光照(Image Based Lighting,IBL)
基于图像的光照(Image Based Lighting,IBL),简单的说就是一类通过 环境贴图(Environment Map) 来保存环境光信息,从而实现基于物理的渲染方法。
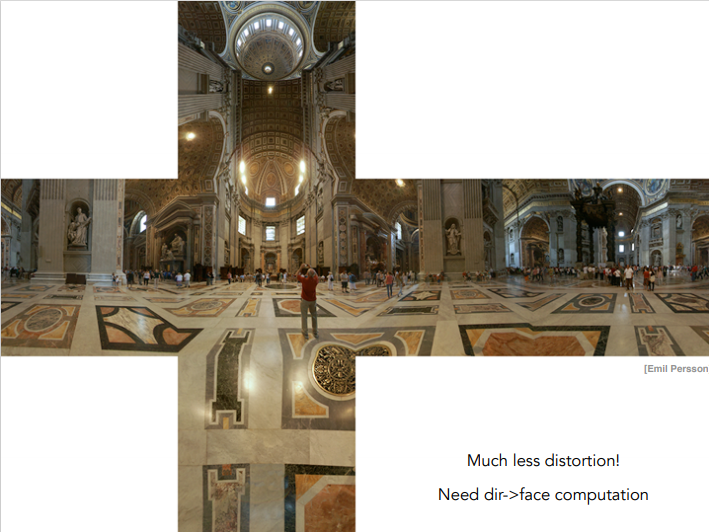
为了表示来自四面八方的环境光信息,IBL 使用 Spherical Map 或者 Cube Map 的方式来存储:

IBL 可用于 diffuse/glossy/specular 物体(基本上包含大部分物体了)渲染:这取决于环境贴图,环境贴图分辨率越大,那么所能表示高频信息就越多,从而越适合 specular 物体的渲染;而分辨率越低,所表示的信息更多是低频信息, 则 diffuse 物体的渲染也足以满足,而且还能节省一定存储空间。
The Split Sum Approximation
IBL 中最常见的算法便是基于 The Split Sum Approximation 的算法。
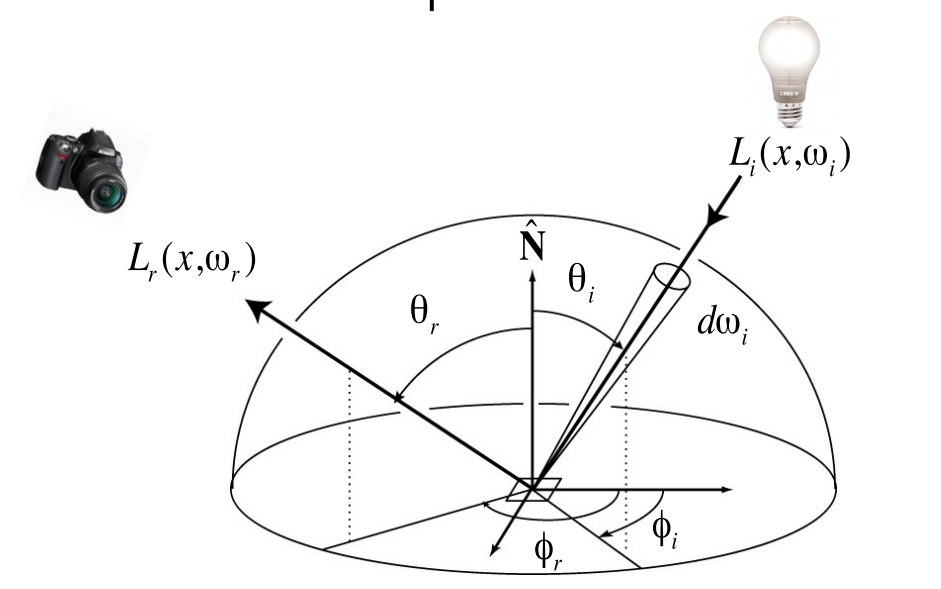
我们知道,一般的渲染方程如下:
在实际渲染的时候,我们当然可以使用蒙特卡洛方法实现该渲染方程,然而这样的开销是巨大的(每个shading point都要做多重采样,而且结果很容易是noisy的)。
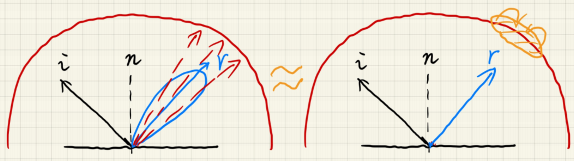
为了进一步加快式子,这里有一个很经典的近似公式:
积分域 :在原本 的积分域范围内剔除掉 的地方而剩余的范围。
想让这个公式近似效果比较精确,那么需要满足以下一种或两种条件:
- 积分域 比较小
- 比较光滑,即变化不是很大
而我们的观察是:
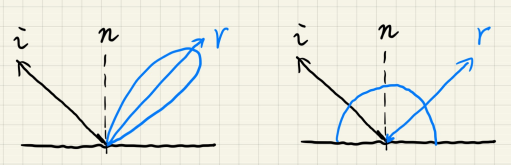
- 如果 BRDF 是 glossy/specular 的,那么它的 lobe 往往是花瓣状,即只有很小的积分域才能接受环境光。
- 如果 BRDF 是 diffuse 的,那么它的 lobe 往往是均匀的半球状,即无论哪个方向的环境光打进来, 函数的输出几乎没多少变化(甚至是个常数)。
于是基于以上理论,Split Sum 方法对渲染方程改造成这样的近似公式来获得渲染的加速:
对渲染方程拆分成两个部分(环境光积分、BRDF积分)后就可以通过预计算的方式(后面两节会介绍如何预计算)分别减少这些积分的运行时开销,总结这种方法的好处是:
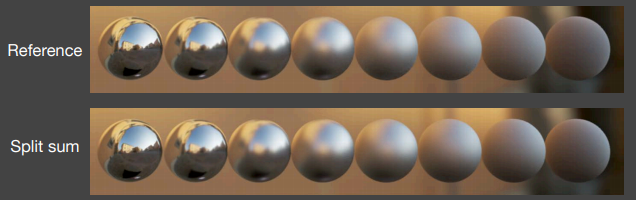
- Split Sum 方法和原始蒙特卡洛方法的图像效果几乎一模一样
- 由于不用对环境贴图进行多重采样,性能开销大大减低了
预过滤环境贴图
环境光积分:
因为我们已经拥有一张环境贴图(无论是实时的还是预渲染的)来存储环境光信息了,为了计算环境光部分的积分,需要在 范围内做多次光线采样。但是,可以有一个几乎等价但避免运行时多次采样的方式:
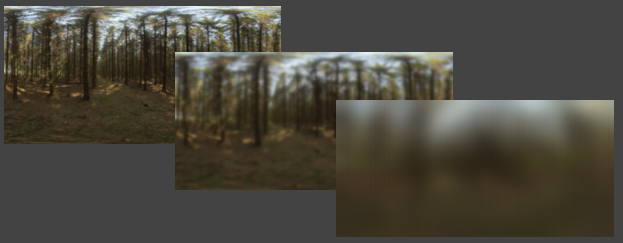
预先对纹理进行滤波操作(模糊),我们只需要对滤波后的环境贴图采样一次光线方向就能得到积分。
滤波后的环境贴图实际上称为 Irradiance Environment Map :原来环境贴图中的单位是 radiance ,贴图积分后的单位则变成了 Irradiance 。
当然,BRDF Lobe 的形状越尖锐,即环境光积分范围越小,就需要使用模糊程度更低的环境贴图;反之 BRDF Lobe 的形状越粗壮,即环境光积分范围越大,就需要使用模糊程度更高的环境贴图。
我们可以使用 Mipmap技术 来生成不同Level的环境贴图,通过三线性插值(Trilinear Interportion)的方式来得出任何模糊程度且任何2D位置的环境光滤波结果。
IBL 往往用于支持静态环境光照,这样就可以进行预过滤环境贴图;当然也可以支持动态环境光照,只是需要实时过滤出动态的环境贴图,有一定的开销。
预计算 BRDF 积分
回顾 Microfacet BRDF 的组成:
- Fresnel项(举例 Schlick's approximation)
- NDF项(举例 Beckmann NDF)
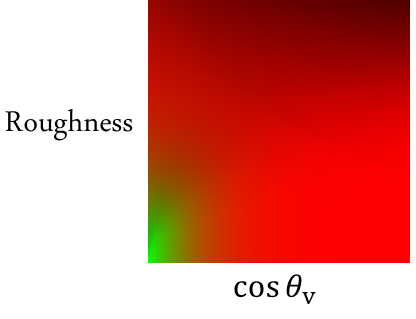
可以预想到,该BRDF 的积分结果依赖于三个参数:
- (Fresnel项系数)
- (粗糙度 roughness)
- (反射方向与法线的夹角,实际上决定了 、)
我们可以把 项拆出来,让BRDF 积分拆成两个积分,但是这些积分都减少了一个依赖的参数:
这样,对于相同的材质(相同的BRDF),我们就可以针对剩余两个依赖的参数 、 建立一张 二维查询表,其两个通道分别代表 A 与 B 的值:
球面拟合函数
SH(Spherical Harmonics,球谐)
SH 是 PRT 的前置知识,也是实时渲染领域中很多技术的前置知识,先介绍一下。
对于任意函数 ,不管是连续的还是不连续的,我们可以展开成一系列基函数(每项都带某个系数)的线性组合:
例如,多项式展开可以看成是一系列基函数(多项式)的线性组合:
再例如,傅立叶变换也可以将 表示成另一系列基函数(各种频率的正弦谐波)的线性组合:
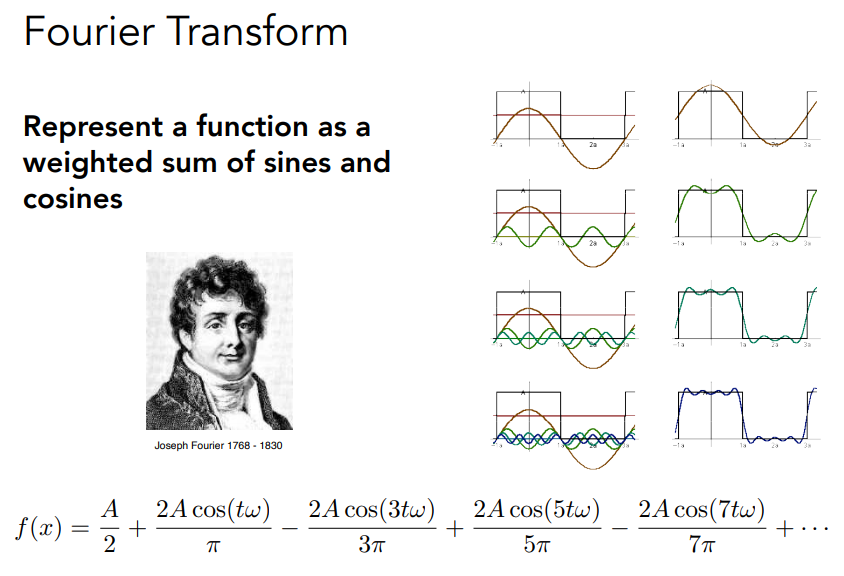
而 球谐(Spherical Harmonics,SH) 便是定义在球面上的一系列2D基函数,它与2D傅里叶序列有点相似,但非常适合球面函数 (即参数为单位球面向量)。
SH 是分阶数的:
- 在第0阶(l=0)有1个基函数(m=0)
- 在第1阶(l=1)有3个基函数(m=-1,0,1)
- ...
- 在第n阶(l=n)有2n+1个基函数(m=-n,...,0,...,n)。
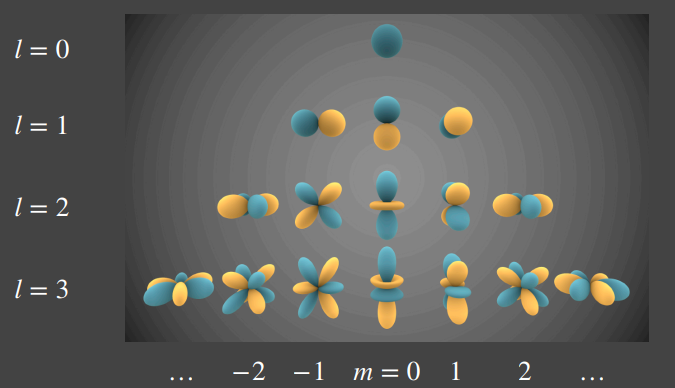
图中蓝色意味着正值,黄色意味着负值。
实际上,阶数越低的基函数所代表的信息就越是低频。如果要完全复原一个任意函数,我们需要无穷阶的 SH,而如果我们只要复原一个任意函数的近似(换句话说只重建出该函数的低频信息),那么我们完全可以只需要前几阶的 SH(包含 l=0,l=1,...,l=n 每一阶的所有基函数)去拟合。
实时渲染中常用二阶SH(其包含系数总共为1+3=4个)和三阶SH(其包含系数总共为1+3+5=9个)来表示。
SH 基函数的形式比较复杂,只建议看一眼就跳过。
SH 的实数形式的基函数如下:
其中,
为勒让德多项式(Legendre polynomials):
z为球面向量对应球面坐标的z值,该多项式不依赖x值y值。
以下是前3阶的SH实数形式的基函数:
:
:
:
SH 与一般的基函数相比,具有以下性质:
- 基函数之间具有正交性(orthonormal)
- 通过 投影(Projection) 可以很方便得到 SH 系数(SH coefficients)
- 通过系数向量组与基函数组的点积(前n阶的基函数/系数共有 n*n 个)可以很方便重建球面函数
- product projection: ,已知 的形式而 未知,有
其中, 为 的SH系数向量组, 为 的SH系数向量组, 为 X 的矩阵,其元素为
这样我们就可以预计算好 ,等到知道 后,乘起来就能得到
推导:
-
支持插值,对 SH 系数的插值相当于对重建的函数值的插值。
-
旋转不变性(rotational invariance),对函数 的旋转 等价于对 的自变量的旋转 :
预计算辐射度传输(Precomputed Radiance Transfer,PRT)
预计算辐射度传输(Precomputed Radiance Transfer,PRT) 是一类基于预计算 radiance transfer(辐射度传输)的渲染方法。
注:PRT 核心并不是预计算环境光照,而是预计算辐射度传输。
所谓 radiance transfer,可以理解成是一种关于光路传输分布的几何信息,例如 shadow,ambient occlusion,物体表面互反射等效果都属于此。也就是说 PRT 要求几何信息是静态的,如果应用到物体上,就需要物体本身不会发生形变;如果应用到几何场景上,就需要场景的几何不会发生变化。
PRT 方法在 2002年 SIGGRAPH 会议被 Peter-Pike Sloan 首先提出,并从此掀起了一波 PRT 方法的研究浪潮,当时论文所实现的 PRT 算法便是大量运用了 SH(球谐)函数方法。实际上 PRT 不仅可以通过 SH 去表示光路传输分布,还可以有其它方式去表示(如 Spherical Gaussian、Wavelet)。
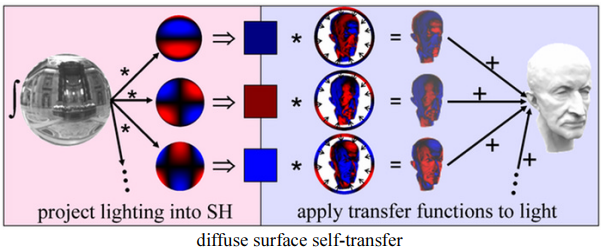
PRT(SH lighting & SH transfer)效果(分别为 diffuse 物体的无阴影情况、diffuse 物体的阴影&互反射情况、glossy 物体的无阴影情况、glossy 物体的阴影&互反射情况):

可以看到 PRT 不仅像 IBL 要应用环境光照,而且还要额外包含物体几何对环境光照的遮蔽效果。
PRT 首先将渲染方程分为两个球面函数,即环境光部分(lighting function)和传输部分(transfer function):
SH Lighting
由于环境光是场景所有物体共享的,所以往往只需要存储一份全局信息,我们甚至可以使用 IBL 方法,但是在 PRT 采用了一种更加压缩的环境光照表达方式,即 SH Lighting。
球谐光照(SH Lighting):使用低阶的 SH 来表示环境光照,这样只需要预先存储少数个 SH 系数(diffuse 情况下 2 阶SH Lighting 只需 RGB 每个通道各 4 个系数,即共 12 个系数)就可以重建出环境光照。
传统的环境光照信息往往使用环境贴图(Environment Map)表示,这往往需要一个庞大的二维数组存储各个 texel 的值,十分耗费空间,而且采样和纹理I/O也有一定开销。而纹理本质上也是一个函数(信号),输入二维坐标,输出对应纹素的 RGBA 值,因此可以用 SH 表示。
- SH Lighting 只预先存储若干个 SH 系数,而不必存储一整张环境贴图,大大减少存储空间和 I/O 开销。
- SH 所能表示的 lighting 信息是低频的,因此 SH lighting 只适用于 diffuse 和 glossy 的物体而不适用于 specular 的物体。
- 环境光照动态性会有所限制(最多只能支持环境光照的 rotation)。
SH Radiance Transfer
传输部分则因为是几何相关的,即每个位置的 transfer 信息往往是不一样的,为此可以每个顶点存储一份 transfer 信息,PRT 同样使用了 SH 来表达 transfer 信息。
PRT 中每个顶点预先存储若干个 SH 系数(diffuse情况下)或者矩阵(glossy情况下),而顶点之间的位置则通过插值的方式来得到对应的 transfer 信息。
- 预计算 radiance transfer 可以在实时渲染中以极低代价实现单个物体的自阴影、互反射的局部几何传输效果。
- 物体自身不能有局部的几何变化(但可以整体 scale, rotation 和 transition)。
如果要将 PRT 应用到场景中,则就要求场景所有物体不能发生任何几何变化(包括 scale,rotation,transition)。由于场景的几何复杂度往往比单个物体的几何复杂度要高得多,并且渲染效果也明显的多,因此要求的 SH 阶数应当更高(精度更高),导致更沉重的空间需求,所以下文以单个物体的 PRT 方法为例讲解。
预计算 SH Lighting & Transfer
Diffuse 物体
Diffuse 物体的渲染方程:
代表环境光; 为 BRDF 项; 为 Visibility,表示不被遮挡的程度,往往表现为自遮挡产生的阴影现象。
- 由于物体是 diffuse 的,因此它的 BRDF 将是一个常数 (无论从哪个方向观察都得到相同的BRDF值),也因此 diffuse 物体的 将是一个常量值,而不受参数 影响
- 对于 lighting 部分 ,原本需要对 Environment Map 进行查询,而现在可以换成使用 SH 函数去表示:
- 对于 transfer function 部分 , 也可以换成使用 SH 函数去表示:
代入渲染方程整理后得:
这样,我们只需要预计算出 和 ,就能让运行时的diffuse物体渲染速度大大提升。
预计算过程:
-
对整个环境光信息(环境贴图),预计算 lighting 的 SH 系数向量组 ,其中一个元素为:
-
对每个顶点,预计算 light transfer 的 SH 系数向量组 ,其中一个元素为:
此时,我们可以理解成系数 代表了环境光照(lighting)的信息,而系数 代表了在某个顶点上光路传输(light transfer)的信息;整个模型预计算完成之后将会得到一个 lighting 系数向量和模型顶点数量对应的 transfer 系数向量。
运行时渲染过程:
-
在 vertex shading 阶段计算顶点的 SH 颜色
-
在 pixel/fragment shading 阶段得到插值后的 SH 颜色即为该像素的颜色
Glossy 物体
Glossy 物体的渲染方程:
对于 glossy 物体,不同视角观察物体表面同一点会有不同的光照。因此 glossy 的 BRDF 将是四维的函数(参数不仅包含,还包含),这次将 BRDF 算入 transfer,则 transfer function 将额外增加一个二维参数
-
对于环境光(lighting)即 ,原本需要对 Environment Map 进行查询,而现在可以换成使用 SH 函数去表示:
-
对于传输函数(transfer function) ,换成使用 SH 函数去表示:
由于额外多了一个二维的参数,transfer 系数将是一个矩阵而非之前 diffuse 情况下的系数向量
代入渲染方程整理后得:
预计算过程:
- 对整个环境光信息,预计算 lighting 的 SH 系数向量组 ,其中一个元素为:
- 对每个顶点,预计算 light transfer 矩阵 ,其中一个元素为: 、
由于 Glossy 物体需要每个顶点存储三个矩阵 T(RGB颜色每个通道对应1个矩阵),这使得空间开销略大,因此不太实用。
运行时渲染过程:
- 在 vertex shding 阶段计算顶点的 SH 颜色
- 在 pixel/fragment shading 阶段得到插值后的 SH 颜色即为该像素的颜色
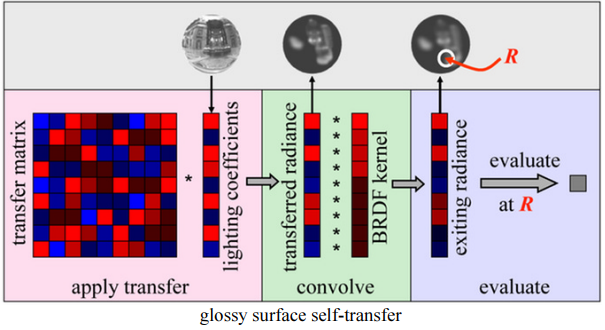
原论文实际上还有个 BRDF 卷积步骤。但是本身用SH表示环境光信息已经足够低频(模糊)了,对这个卷积步骤,个人先存个疑。
预计算 Interreflection Transfer
而前面的渲染方程中:
只考虑几何传播关系的因素只有 ,即只可实现阴影或者无阴影(令 )的效果,并不能实现互反射(interreflection)的效果。
所谓 interreflection,实际上就是某个点朝外围环境看时, 意味着有几何部分遮挡住了直接的环境光,但实际上遮挡还意味着这些几何部分上的出射光会反射给该点,这就形成了该点间接的环境光照。
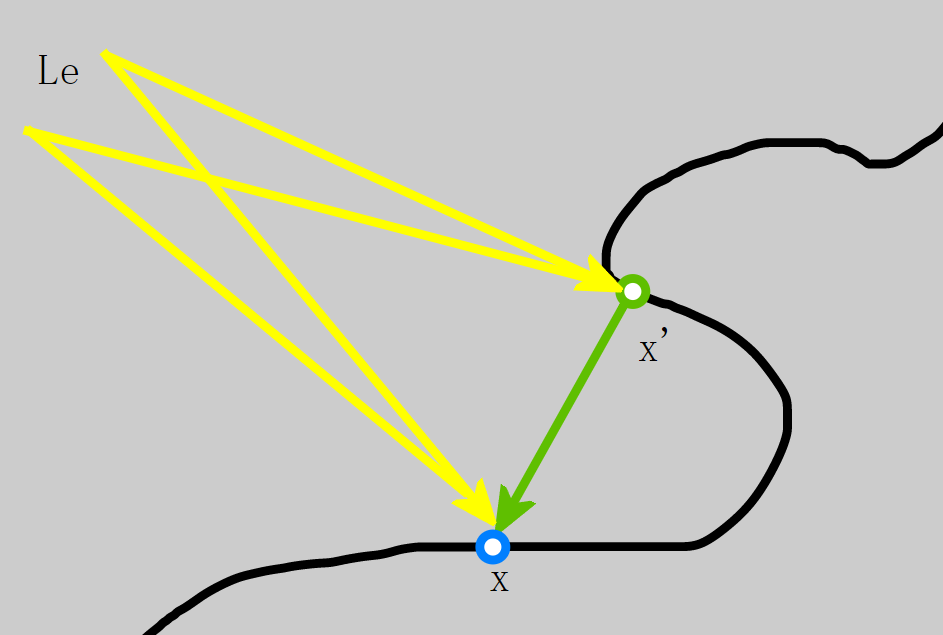
(迭代)增加 1 次互反射的渲染方程:
意味着在某个点 的 radiance,而 则是从 朝 方向进行 raycast 而得到相交的其它点( 依赖于 ),而 则代表了迭代了多少次。
Diffuse 物体
由于 diffuse 与出射方向无关,因此去掉 的参数 。
将上述式子左右两边同时分离出 (因为无论点在 还是别的 ,其所在的环境光照 lighting SH 系数都是一样的 ),则意味着我们实现 Interreflection 的效果只需要在所有顶点 的 transfer 向量做以下迭代:
More Effective PRT
SH Rotation
PRT 的一个问题是如果 lighting 部分是预计算的,那就只适用于静态环境光下的静态物体渲染;环境光或者物体只要有变化,PRT 就不得不进行重新预计算;但得益于 SH 的旋转不变性,我们至少可以让 SH Lighting 适用于动态旋转的情形而不必重新预计算。
注:环境光旋转和物体旋转在 PRT 渲染中是等价的(只是说看相对于哪个东西来看待旋转而已)。当然实践中,我们也可以对输入向量来进行反向旋转,来获得等同于环境光正向旋转的效果;只是如果考虑每次对输入向量进行旋转操作比较费的话,可以考虑一次性旋转完 SH lighting,就避免了输入向量旋转的操作了。
现在给定旋转 ,然后有SH投影函数 (输入一个球面向量,输出第 层band的 SH 系数向量组)。假设我们有 个任意的球面向量,我们需要想办法求出能等价于旋转 的矩阵 来旋转 SH 投影函数 :
整理得:
记 ,如果矩阵 是可逆的,则:
这样,无论 怎么变化,我们都可以即时根据 求出 ,然后把最新的 应用到所有预计算好的 上(即预计算好的SH系数上),而不必重新预计算 。
也就是要做 SH 的快速旋转实现,就需要对所有层进行处理,对于第 层 band 处理如下:
- 选取共 个 单位向量 ,这些向量 投影在该层 band 上的基函数就能得到系数 。共 个 维向量 构成了矩阵 ,并求出
如何选取单位向量:要保证投影后构成的 矩阵可逆。
-
给定旋转 ,对所有 依次做旋转 ,这些旋转后的单位向量同样投影在该层 band 上的基函数就能得到系数 。 共 个 维向量 构成了矩阵
-
求出该层 band 上球谐函数的旋转矩阵
-
用 乘以该层 band 上的 SH 系数向量组就可以得到旋转后的 SH 系数向量组。
时只有1个系数,故不需要处理; 时需要处理3个系数,其中的 将会是 3X3 矩阵; 时需要处理5个系数,其中的 将会是 5X5矩阵......
最后,将每一层 band 的结果重新拼接起来即可得到完整的旋转后的 SH 系数结果。
// 伪代码:三阶SH旋转
SHCoeffientsAfterRotation(Array coeffients, Rotation rotation){
Array res;
// 处理 l = 0
res[0] = coffients[0];
// 处理 l = 1
// step 1
n1 = [1,0,0],n2 = [0,1,0],n3 = [0,0,1];
A = [ // SHProject(n,l,m):向量n投影到SH中l层第m个基函数,输出对应系数
[SHProject(n1,1,-1),SHProject(n2,1,-1),SHProject(n3,1,-1)],
[SHProject(n1,1,0),SHProject(n2,1,0),SHProject(n3,1,0)],
[SHProject(n1,1,1),SHProject(n2,1,1),SHProject(n3,1,1)]
];
A_inv = InvMatrix(A);
// step 2
rn1 = rotation*n1,rn2 = rotation*n2,rn3 = rotation*n3;
S = [
[SHProject(rn1,1,-1),SHProject(rn2,1,-1),SHProject(rn3,1,-1)],
[SHProject(rn1,1,0),SHProject(rn2,1,0),SHProject(rn3,1,0)],
[SHProject(rn1,1,1),SHProject(rn2,1,1),SHProject(rn3,1,1)]
];
// step 3
M = S*A_inv;
// step 4
coeff_l1 = M*[coeffients[1],coeffients[2],coeffients[3]];
res[1] = coeff_l1[0];
res[2] = coeff_l1[1];
res[3] = coeff_l1[2];
// 处理 l = 2
// step 1
k = 1/sqrt(2);
n1 = [1,0,0],n2 = [0,0,1],n3 = [k,k,0],n4 = [k,0,k],n5 = [0,k,k];
A = [
[SHProject(n1,2,-2),SHProject(n2,2,-2),SHProject(n3,2,-2),SHProject(n4,2,-2),SHProject(n5,2,-2)],
[SHProject(n1,2,-1),SHProject(n2,2,-1),SHProject(n3,2,-1),SHProject(n4,2,-1),SHProject(n5,2,-1)],
[SHProject(n1,2,0),SHProject(n2,2,0),SHProject(n3,2,0),SHProject(n4,2,0),SHProject(n5,2,0)],
[SHProject(n1,2,1),SHProject(n2,2,1),SHProject(n3,2,1),SHProject(n4,2,1),SHProject(n5,2,1)],
[SHProject(n1,2,2),SHProject(n2,2,2),SHProject(n3,2,2),SHProject(n4,2,2),SHProject(n5,2,2)]
];
A_inv = InvMatrix(A);
// step 2
rn1 = rotation*n1,rn2 = rotation*n2,rn3 = rotation*n3,rn4 = rotation*n4,rn5 = rotation*n5;
S = [
[SHProject(rn1,2,-2),SHProject(rn2,2,-2),SHProject(rn3,2,-2),SHProject(rn4,2,-2),SHProject(rn5,2,-2)],
[SHProject(rn1,2,-1),SHProject(rn2,2,-1),SHProject(rn3,2,-1),SHProject(rn4,2,-1),SHProject(rn5,2,-1)],
[SHProject(rn1,2,0),SHProject(rn2,2,0),SHProject(rn3,2,0),SHProject(rn4,2,0),SHProject(rn5,2,0)],
[SHProject(rn1,2,1),SHProject(rn2,2,1),SHProject(rn3,2,1),SHProject(rn4,2,1),SHProject(rn5,2,1)],
[SHProject(rn1,2,2),SHProject(rn2,2,2),SHProject(rn3,2,2),SHProject(rn4,2,2),SHProject(rn5,2,2)]
];
// step 3
M = S*A_inv;
// step 4
coeff_l2 = M*[coeffients[4],coeffients[5],coeffients[6],coeffients[7],coeffients[8]];
res[4] = coeff_l2[0];
res[5] = coeff_l2[1];
res[6] = coeff_l2[2];
res[7] = coeff_l2[3];
res[8] = coeff_l2[4];
return res;
}
这样我们对 lighting 的 SH 系数做 rotation,就可以实现支持环境光旋转或物体旋转的实时 SH Lighting。
但是注意,不应当对 transfer 的 SH 系数做 rotation,因为一个物体的 transfer function 只考虑自身的几何遮蔽(自身与自身的遮蔽关系),而非像物体与环境光那样存在相对关系。
SH rotation 效果图:
无需迭代的 Infinite-bounce Transfer
前面的 PRT 章节中,我们知道 diffuse 物体的 transfer 迭代公式如下:
要计算出 diffuse 物体的 infinite-bounce 的 transfer,理论上需要进行无限次迭代。然而我们可以利用一些假设来化简掉无限迭代,从而实现一次迭代算出 infinite-bounce 的 transfer 向量。
一个观察是点 与其发出射线能相交到的点 的距离往往是比较近的(万一距离远了 在积分计算中的贡献反正也比较少),因此它们的几何环境也是比较接近的。因此我们假设 和 的 transfer 基本一致,即 。
因此原式可以移除无关参数,进一步化简为:
令
由于
- diffuse BRDF为 ,而一般 albedo 都会小于 1
因此可得
原递推式可得:
- ...
递归代入后得:
等比数列求和得:
当 n 趋近于无穷时,又 ,则最终收敛得到了结论
总结
无论 IBL 还是 PRT 都属于实现环境光照的方案,它们的区别在于:
- IBL 是一种从预计算环境光照出发的环境关照渲染方案:
- 采用环境贴图:存储占用空间较大,同时也占采样 I/O。
- 能保留高频信息,常用于 diffuse/glossy/specular 物体的渲染。
- PRT 是一种从预计算 transfer function 出发的环境光照渲染方案:
- 采用 SH lighting:存储开销和重建环境光照的开销极低。
- 只能保留低频信息,常用于 diffuse/glossy 物体的渲染。
- 效果上,相比 IBL 额外考虑了物体几何对环境光照的遮蔽效果。但只考虑了物体局部 transfer 效果,没有考虑完整场景 transfer 效果。不过在其它 PRT 方案中有支持完整场景的 transfer 效果。
- 物体不可局部形变,材质不可动态:若发生变化,那么其 transfer 就需要更新。
全局光照(Global Illumination,GI),严格意义上指完整的物理的间接光照效果,实际上只要有体现间接光效果(即使是部分效果或者 tricky 的效果)的光照都可称为 GI,因此它总体上分为两派:
- 有一派是通过一套统一标准的渲染流程把任何物体的 GI 计算出来,往往计算量极大但效果更加物理更加真实,典型的例子便是 path tracing
- 另一派是把 GI 的效果看成一个个部分来组成,这样我们可以选择其中一些 GI 效果组合使用,适应不同的性能(往往计算量相对低些,尤其是实时渲染)的同时也能带来能接受的 GI 效果(虽然往往不是严谨的物理正确),例如:在单个物体的角度上实现环境光照的局部自遮蔽/自反射效果(例如 PRT),在整个场景的角度来实现间接光照在全局场景 bounce 来 bounce 去的效果(例如 VXGI)。
参考
作者:KillerAery
出处:http://www.cnblogs.com/KillerAery/
本文版权归作者和博客园共有,未经作者同意不可擅自转载,否则保留追究法律责任的权利。


【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· DeepSeek “源神”启动!「GitHub 热点速览」
· 我与微信审核的“相爱相杀”看个人小程序副业
· 微软正式发布.NET 10 Preview 1:开启下一代开发框架新篇章
· C# 集成 DeepSeek 模型实现 AI 私有化(本地部署与 API 调用教程)
· spring官宣接入deepseek,真的太香了~