PID控制算法
闭环控制(反馈回路close loop):
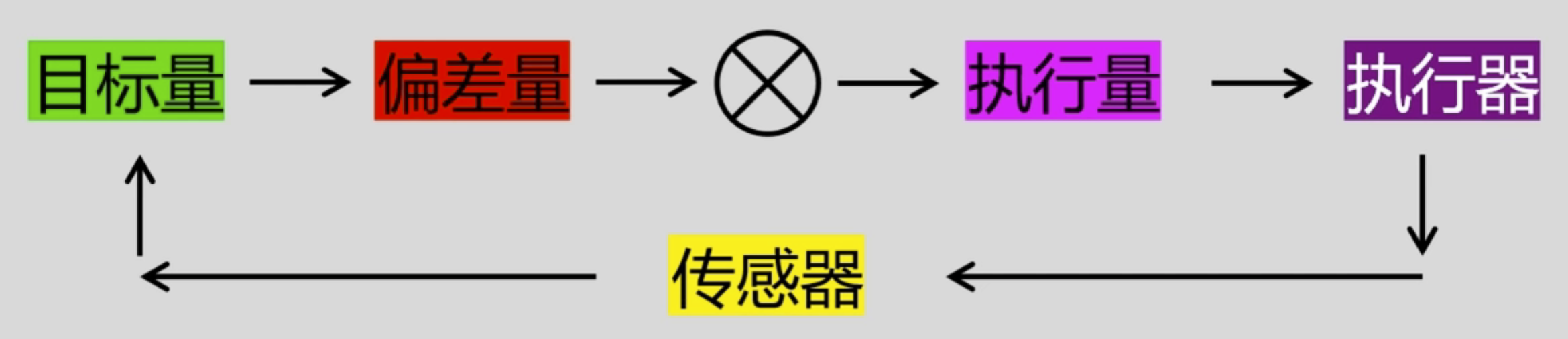
闭环控制系统需要目标量,执行器,传感器
通过偏差量获得执行量是最为重要的
目标量和传感器获得的执行器数据都需要是连续的;
偏差量来自于传感器和目标量数据和执行量不是同一个单位,需要一个比例P系数进行规整;
偏差量=目标量-当前位置量
比例P=偏差量*比例P系数
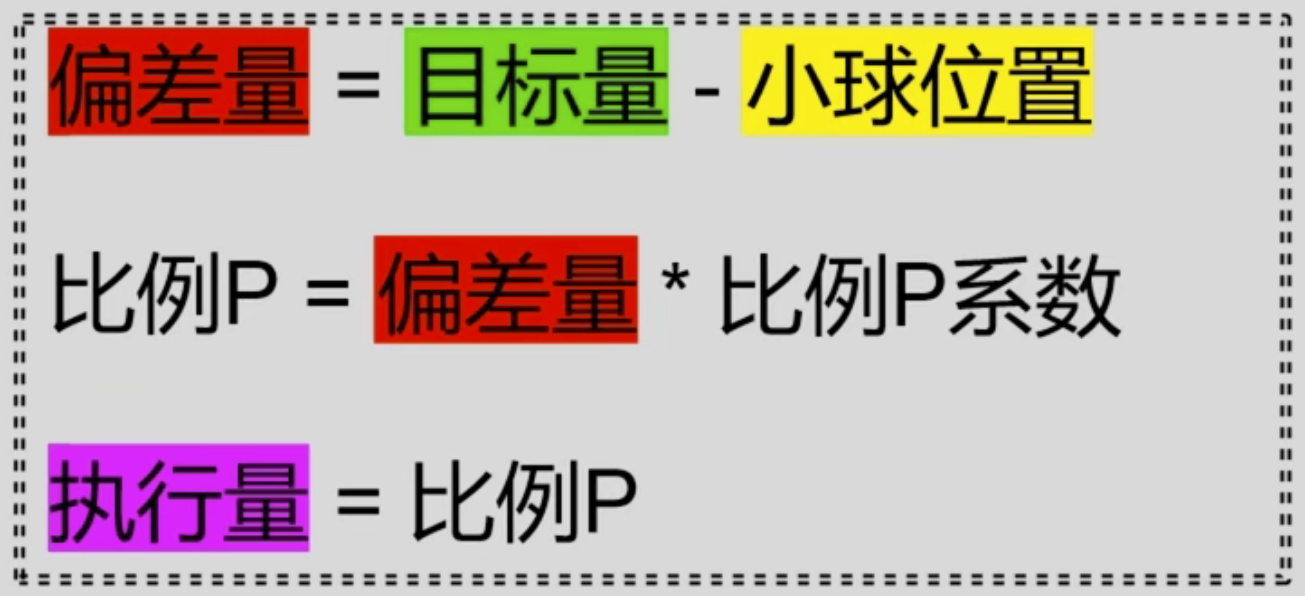
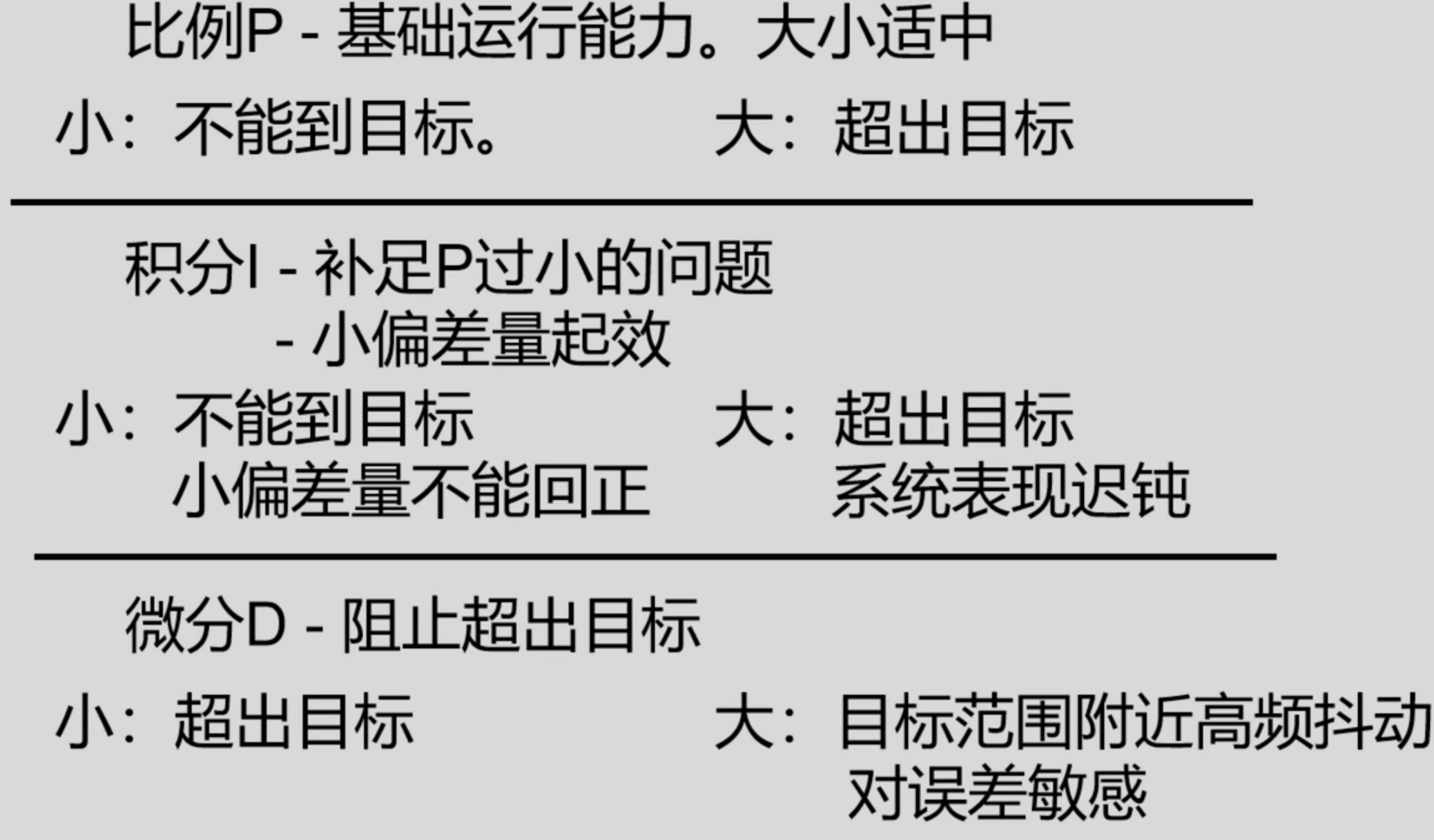
偏差量越大,执行量就越大,之间成正比例关系;(只有比例P存在缺陷,数值固定,不能根据速度时间及时进行判定调整)
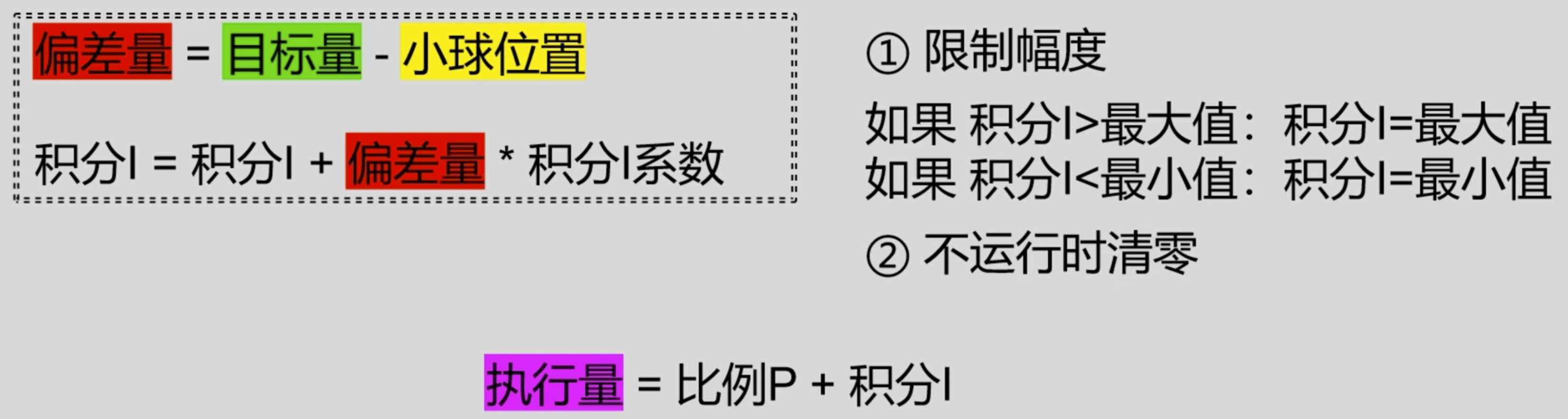
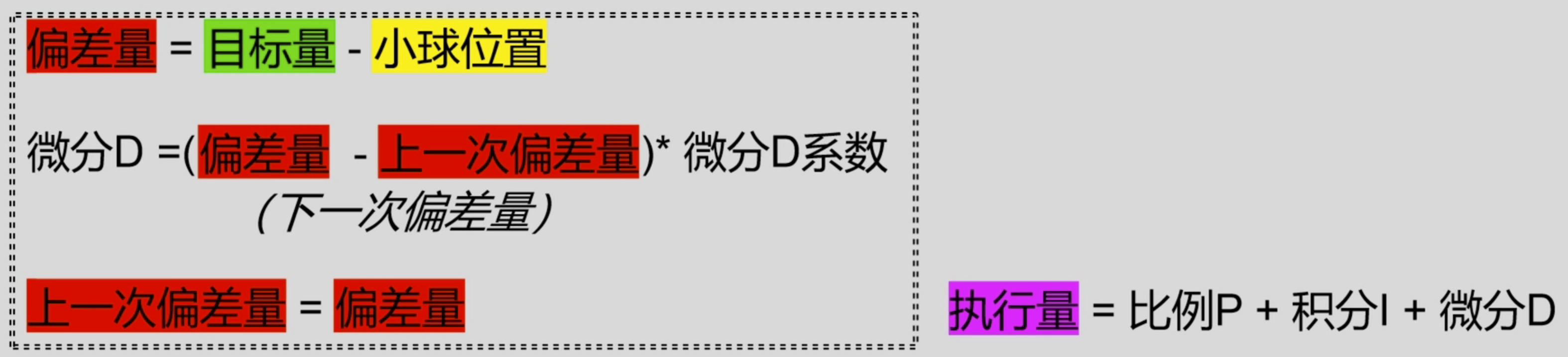
增加时间维度解决这个问题, 增幅器-积分I(解决比例P过小,进行补充) 抑制器-微分D(比例P过大,削减)
增幅器(累加过去)
抑制器(预测未来)
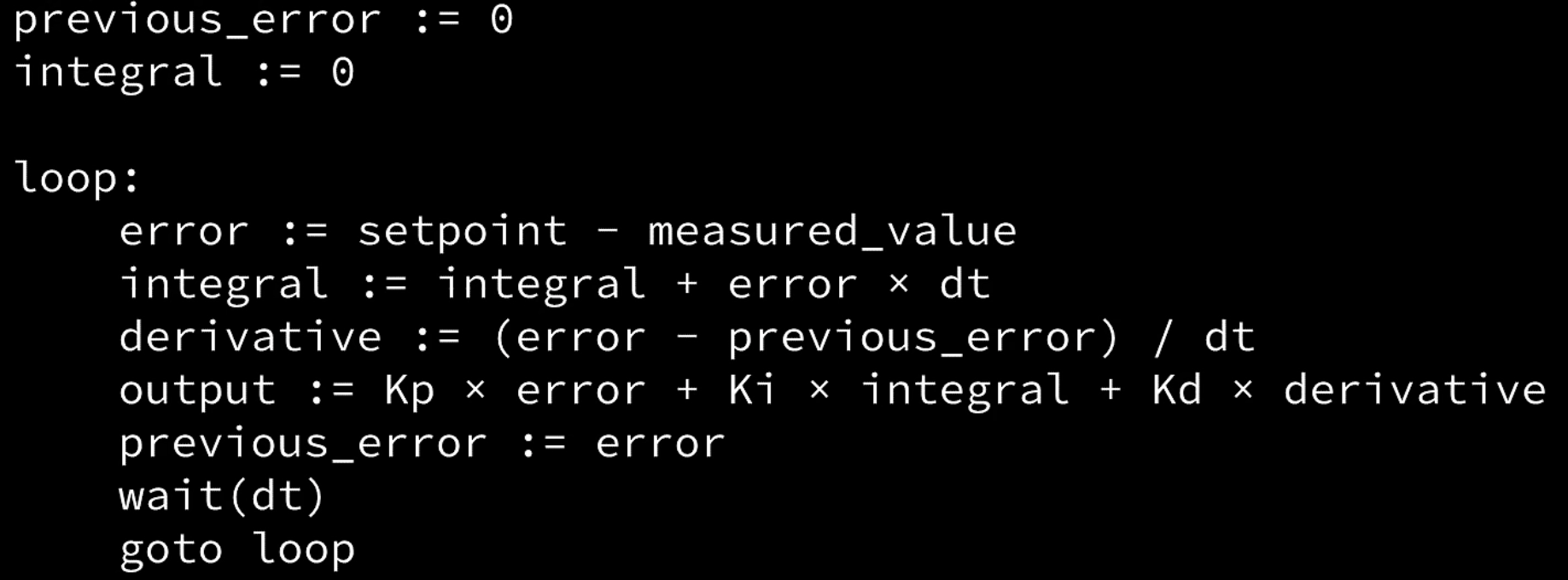
伪代码:




【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 使用C#创建一个MCP客户端
· ollama系列1:轻松3步本地部署deepseek,普通电脑可用
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· 按钮权限的设计及实现