ROS学习
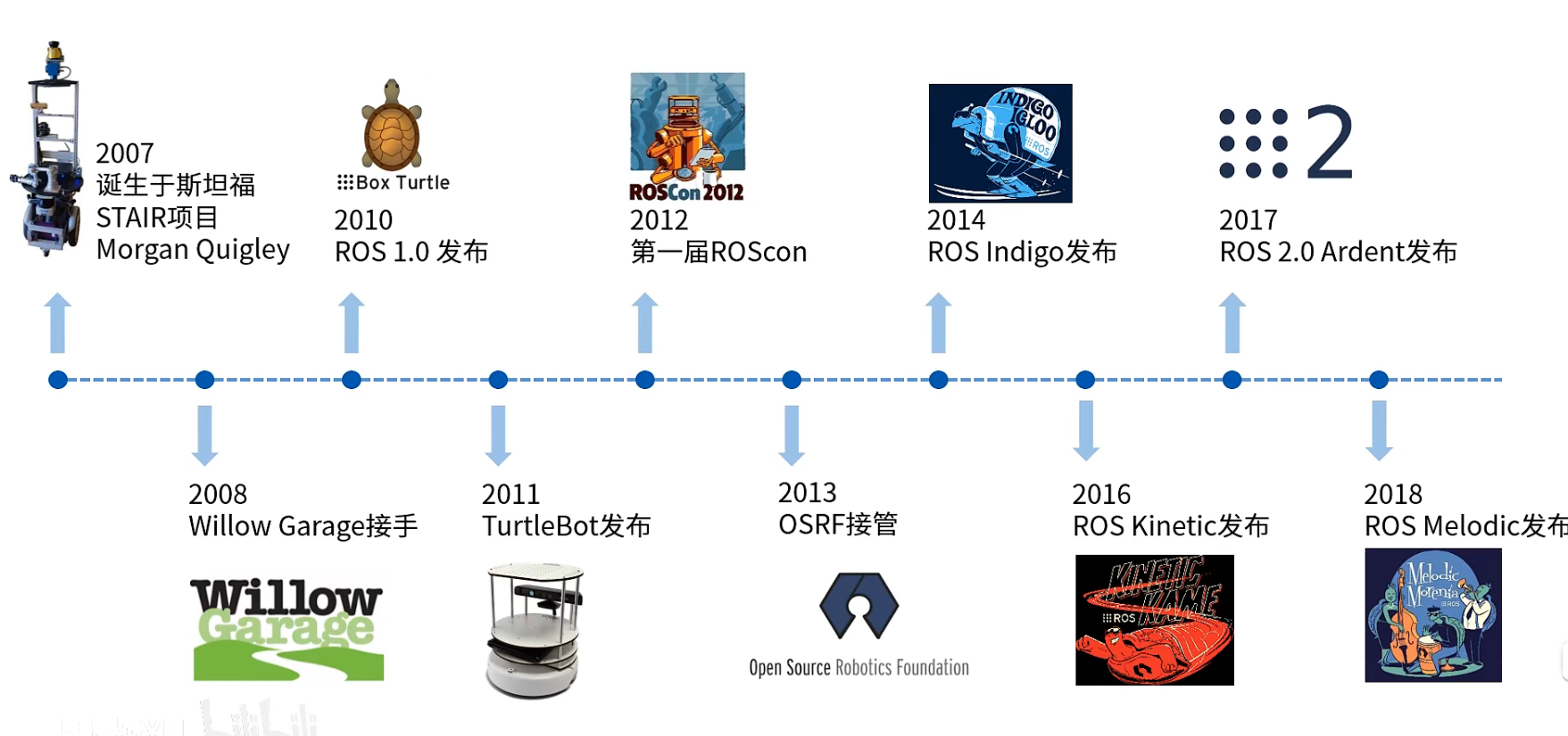
ROS发展史
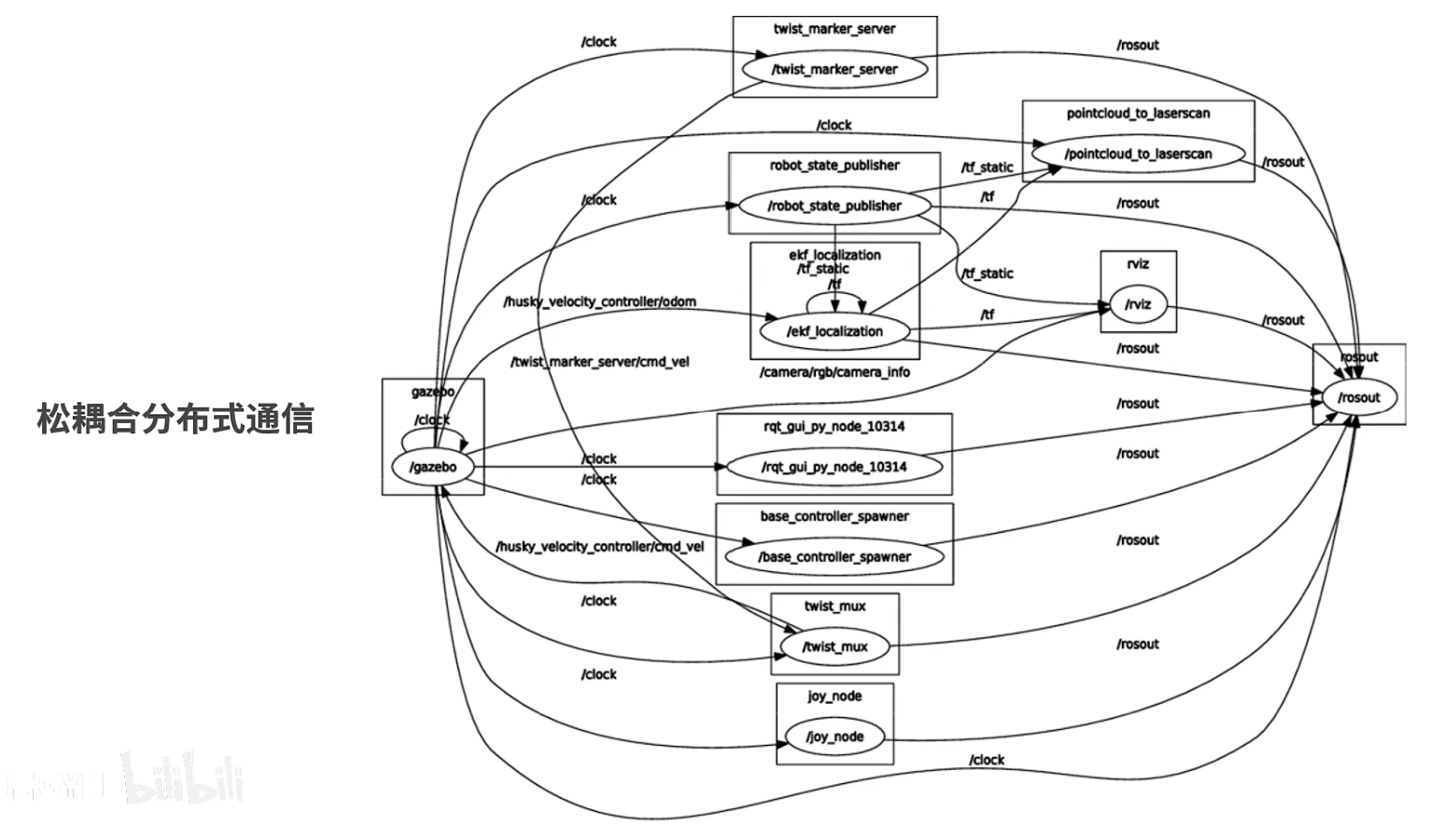
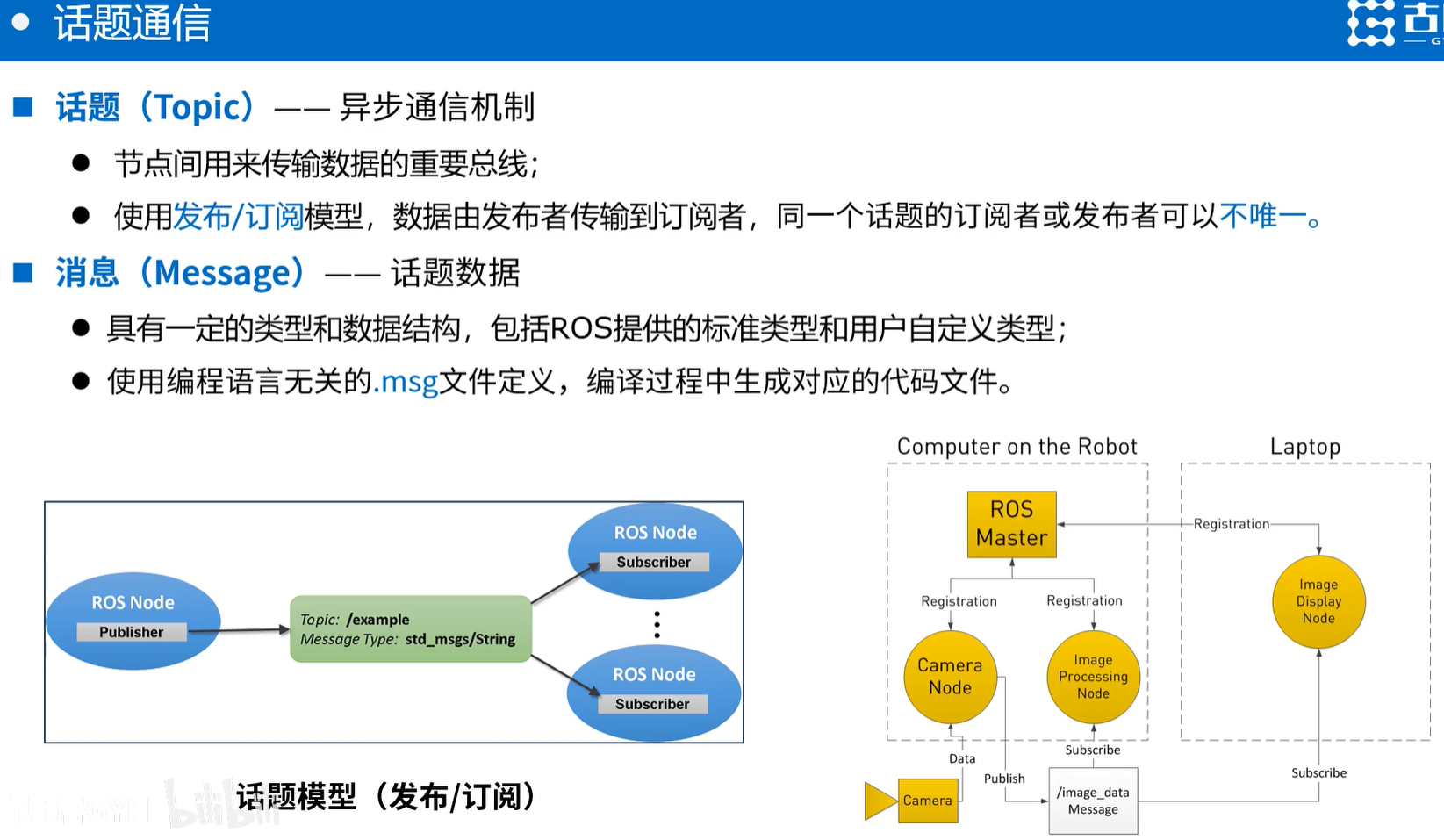
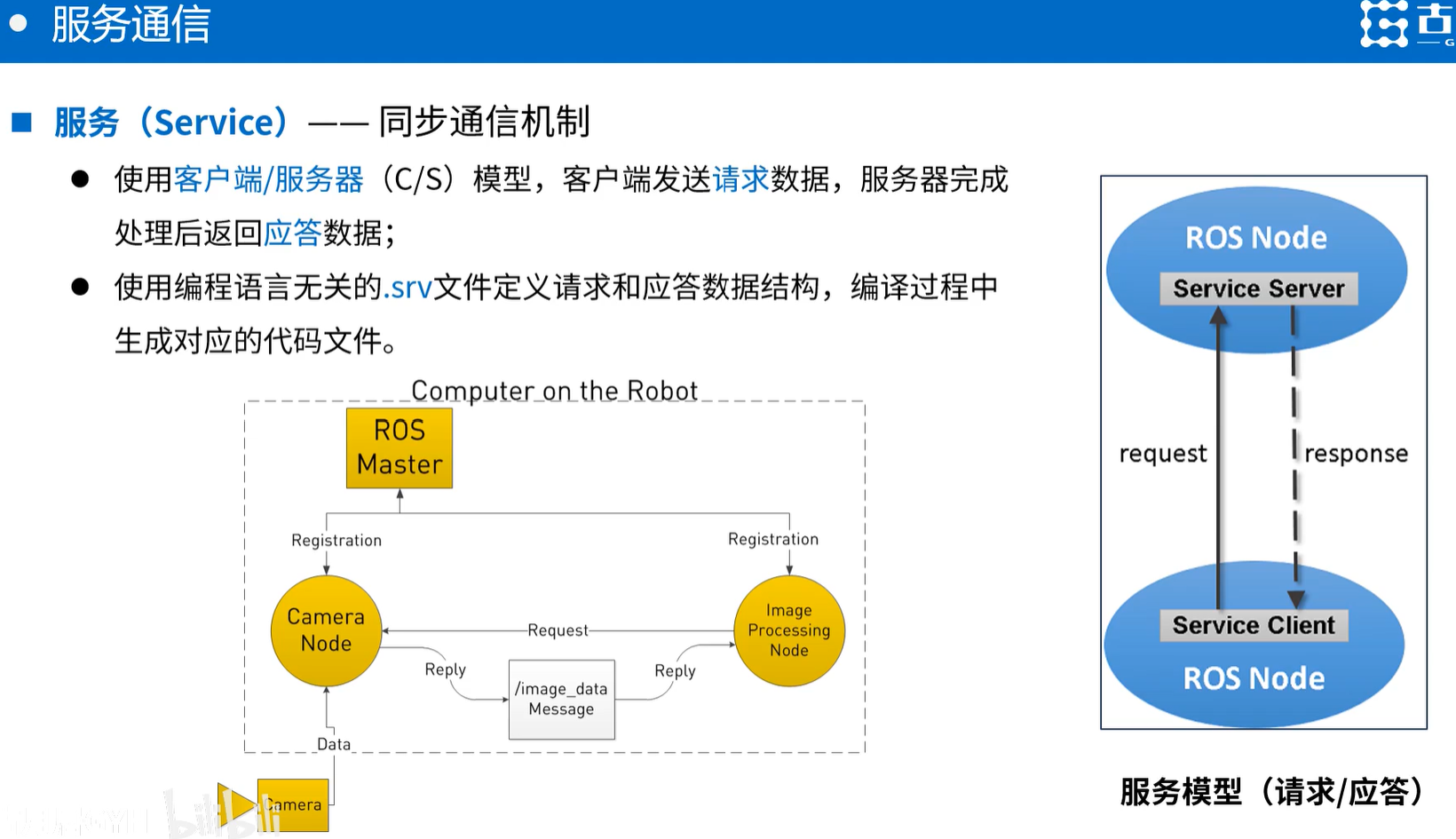
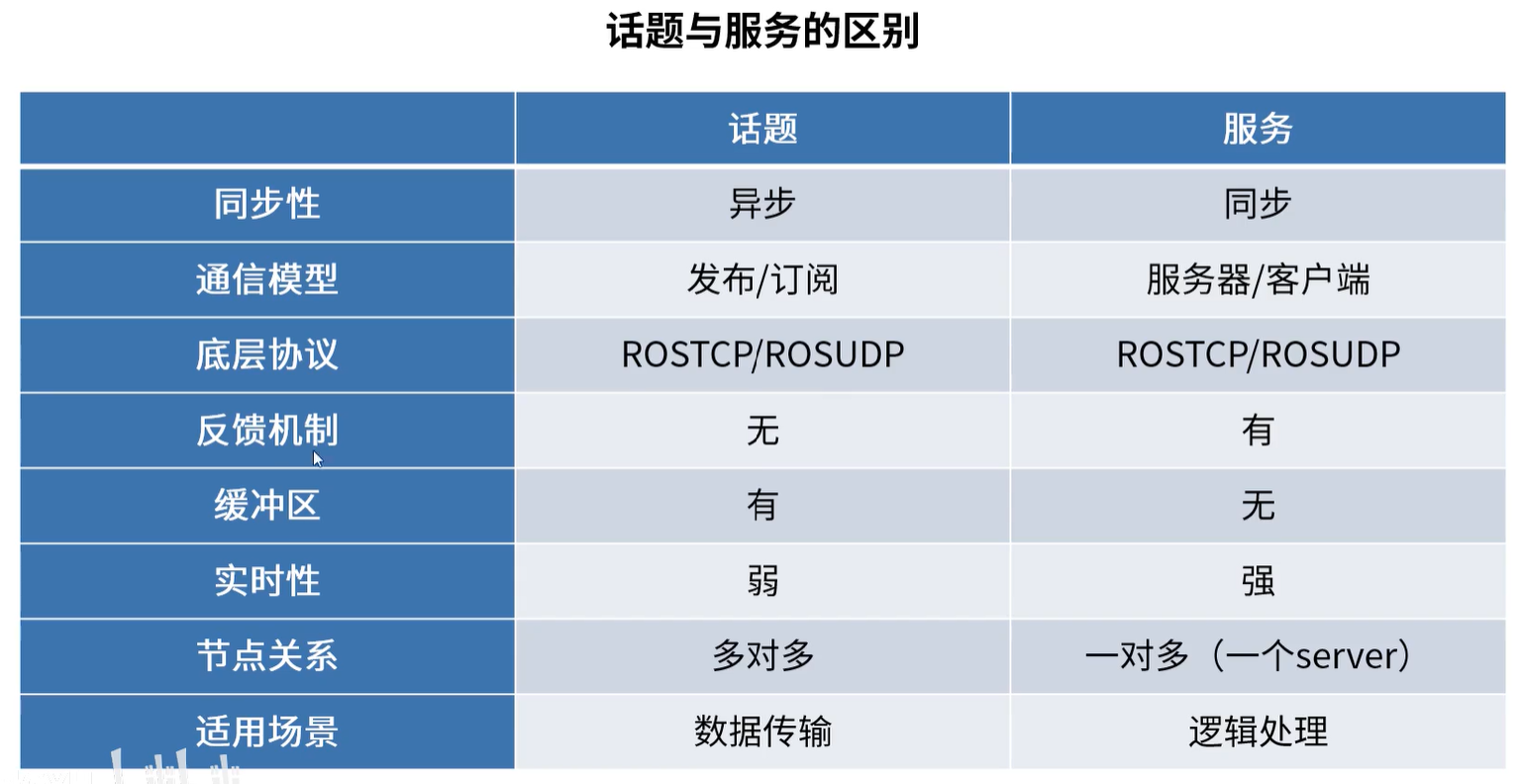
通信计算图:
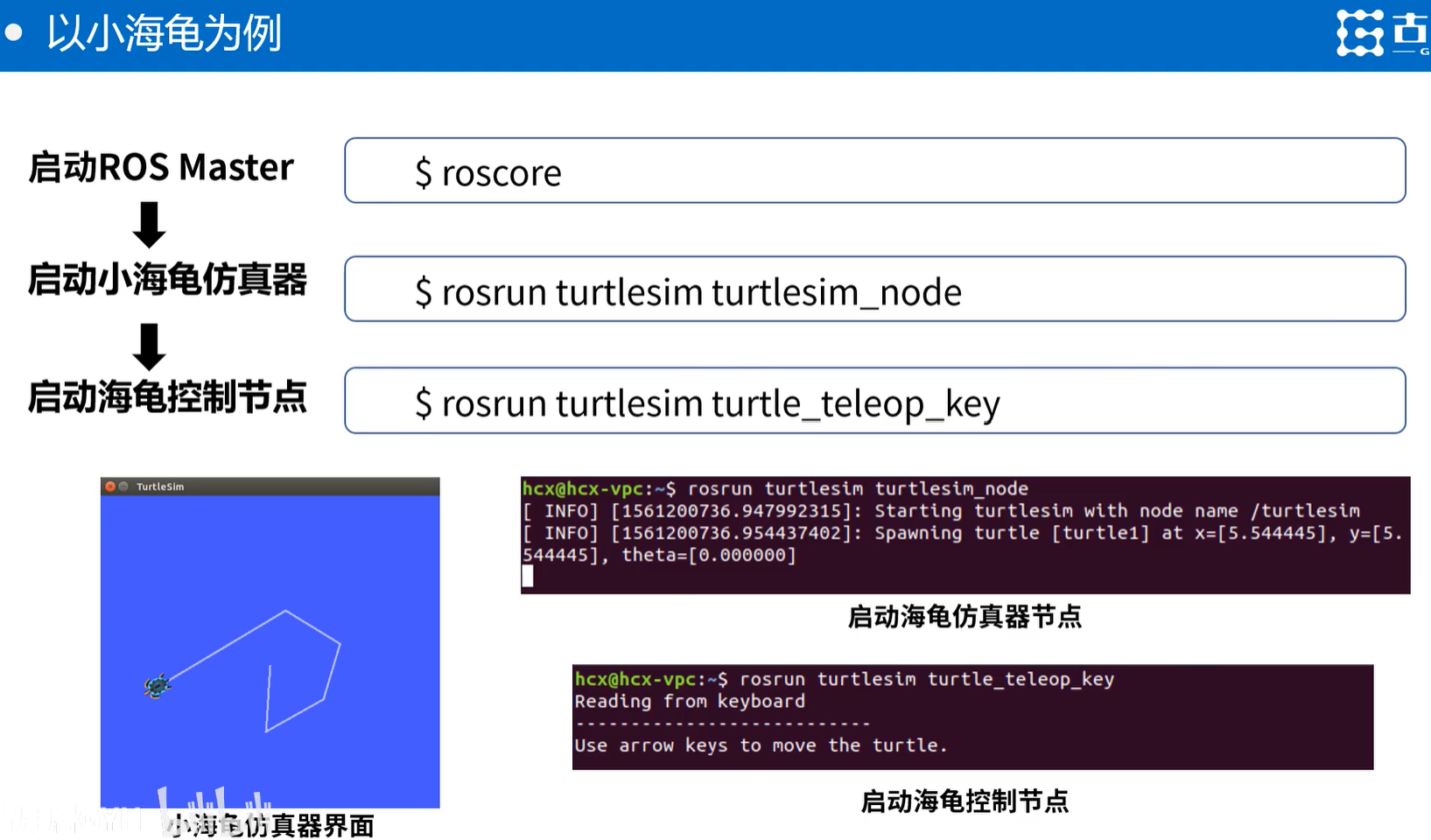
$roscore ##启动ROS Master
$rosrun turtlesim turtlesim_node ##运行功能包中的节点
$rosrun turtlrsim turtle_teleop_key ##运行键盘控制节点
ROS发展史
通信计算图:
$roscore ##启动ROS Master
$rosrun turtlesim turtlesim_node ##运行功能包中的节点
$rosrun turtlrsim turtle_teleop_key ##运行键盘控制节点




【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 地球OL攻略 —— 某应届生求职总结
· 提示词工程——AI应用必不可少的技术
· 字符编码:从基础到乱码解决
· SpringCloud带你走进微服务的世界