
AI行为树的工作原理
很久没写博客了,最近在项目刚部署到测试服,需要进行压测,老大相当专业的用了行为树来组织压测机器人的代码,这段时间陆陆续续在网上看了不少关于行为树的文章,其中有一篇我觉得写得非常到位,它原文是英文,链接将在下面给出,在这之前看了很多国内的文章都是写的糊里糊涂,后来看过这篇文章后,总算是对行为树的概念入了门。在这里我会把它的大致意思给翻译出来(注:由于原文有不少啰嗦的地方,所以没有逐句的翻译),以它的行为结构为标准,并会在译文中穿插一些自己的理解来谈谈我眼中的行为树,如果有什么不对的地方,欢迎大家指点。
一、介绍
尽管网上已经有大量关于行为树的教程,但是在开发游戏中的 AI 时还是遇到了不少关于行为树的问题。很多教程不关注于代码的实现,而是给出一些非常笼统的节点图,就像这样:
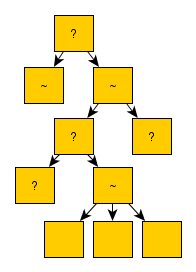
这些节点看起来非常的抽象,这对于我了解行为树的运作机制没有什么帮助,因为这样完全建立不起一个完整行为树的概念。自然也就更不知道如何在代码中进行行为树的实现。
行为树的概念见名知意,它是一棵具有层级结构的树,主要用来控制 AI 的决策,树的末端(注:叶子节点)就是 AI 实际要去做的事情。连接树枝的是各种类型的节点(注:这些节点将在后面讲解),这些节点决定了如何一个 AI 如何从根节点走到某一个叶子节点,并执行相应的命令操作。
二、树的遍历
行为树的一个特点就是它会一层一层的对节点依次进行检查,而每一层都要花费一个 Tick 的时间,所以一棵树要花费很多 Tick 的时间才能完成遍历,这和一般代码的实现有很大的区别。这是一个很没有效率的方式,尤其是当树变得很深的时候。我认为行为树的实现最好要在一次 Tick 里面完成整个行为树的逻辑判断,也就是说最好能在一次 Tick 时间里完成整棵树的遍历。
三、工作流
行为树由多种不同类型的节点组成,这些节点都会返回三种状态中的一种作为节点的运行结果。三种状态分别是:
- 成功 - Success
- 失败 - Failure
- 运行中 - Running
前两个,正如它们的名字一样,是用来向它们的父节点通知运行的成功或失败。第三种是指还在运行中,结果还未确定,会在下一个 Tick 的时候再去检查这个节点的运行结果。这个功能非常重要,它可以让一个节点持续运行一段时间来维持某些行为。比如一个 Walk 节点会在计算寻路和让角色保持行走的过程中持续返回 Running 来让 AI 保持这一状态。如果寻路因为某些原因失败,或是除了某些状况让行走的行为不得不中止,那么这个节点会返回 Failure 来告诉它的父节点;如果这个角色走到了指定的目的地,那么节点返回 Success 来表示这个行走的指令已经成功完成。这些状态可以用来决定行为树的走向,确保 AI 可以按照我们预期的方式来以某些顺序去执行行为树里的行为。
上面是节点的 3 种状态。说完了节点的 3 种状态,下面来说一说行为树中节点的类型。行为树节点类型分为下面 3 种:
- 组合节点 - Composite
- 修饰节点 - Decorator
- 叶子结点 - Leaf
这些节点类型可以说是行为树最精华的内容,下面将分别对这 3 种类型的节点做说明。
1、组合节点
我们先来看看行为树中最常见的组合节点。组合节点通常可以拥有一个或更多的子节点。这些子节点会按照一定的次序或是随机地执行,并会根据执行的结果向父节点返回 Success 、Failure,或是在未执行完毕时返回 Running 这样的结果值。
- 次序节点
- 选择节点
- 并行节点
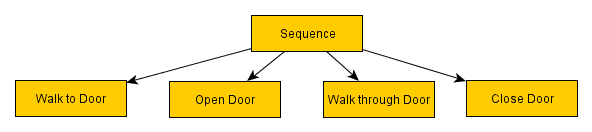
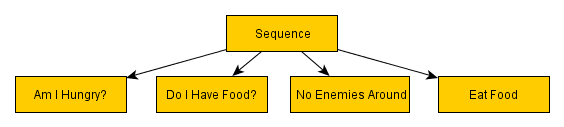
(1)次序节点
(2)选择节点
(3)并行节点
我们每个节点都会有一个运行状态,来表示当前行为是否结束。对于组合节点来说,它的运行状态就是其子节点的运行状态,选择节点和次序节点比较好处理,因为对于这两种控制节点来说,每时刻,只会有一个子节点在运行,只要返回在运行的这个子节点的状态即可。但对于并行节点来说,它同时刻会有多个子节点运行。
2、修饰节点
- 逆变节点
- 成功节点
- 重复节点
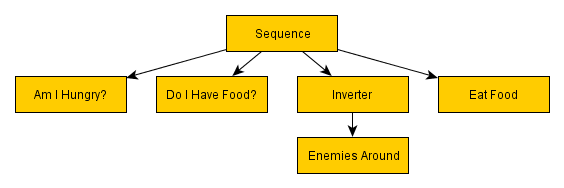
(1)逆变节点
Inverter(逆变节点)可以将子节点的结果倒转,比如子节点返回了 Failure,则这个修饰节点会向上返回 Success,就像上面的例子里所说的一样。
(2)成功节点
成功节点不管它的子节点向其返回的结果为何,它总是向它的父节点返回 Success 的结果。这个往往用在当你知道一个子节点一定会返回 Failure 的结果,而它的父节点是次序节点,会因为子节点的 Failure 而终止,那么你可以强行让这个子节点返回 Success,来避免这一情况的发生。我们并不需要一个专门的失败节点,因为一个逆变节点加上成功节点就可以达到这一效果。
(3)重复节点
重复节点会在它的子节点返回结果后反复继续执行它。重复节点常常被用在一棵树的最顶部来确保树的持续运行。另外重复节点也可以被设定重复执行的次数。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号