
UnityShader渲染流程
UnityShader渲染流程
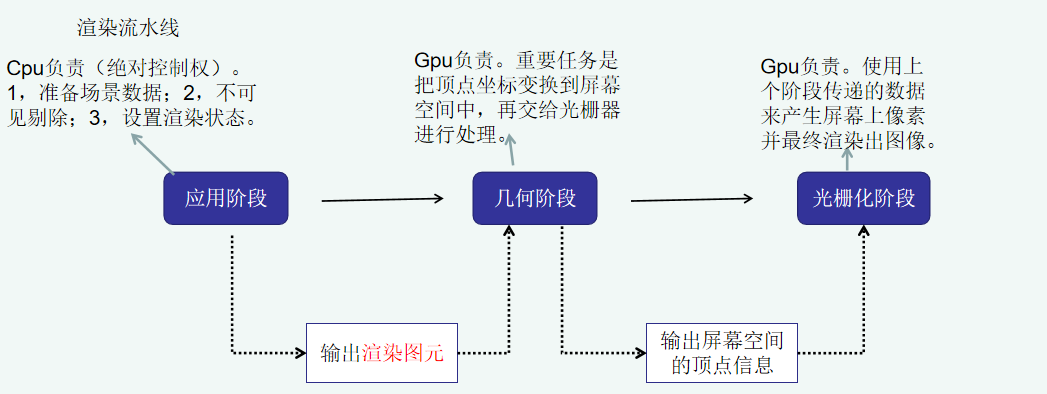
《一》应用阶段
1,把数据加载到显存中。将渲染所需数据从硬盘加载到内存中,网格纹理等数据又被加载到显存中(一般加载到显存后内存中的数据就会被移除)
2,设置渲染状态。这些状态定义了场景中的网格是怎么被渲染的。例如,使用哪个顶点着色器, 片原着色器,光源属性,材质等。
3,调用Draw Call。Draw Call 就是一个命令,它的发起方是Cpu,接收方是Gpu。这个命令仅仅会指向一个需要被渲染的图元列表,而不会包含任何材质信息。
《二》几何阶段
几何阶段和光栅化阶段,开发者无法拥有绝对的控制权,其实现的载体是Gpu。Gpu通过实现流水线化,大大加快了渲染速度。虽然我们无法完全控制这两个阶段的实现细节,但是Gpu向开发者开放了很多控制权。
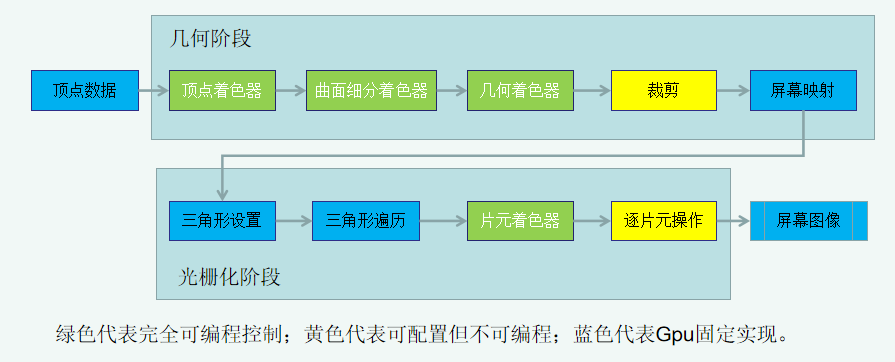
(1),顶点数据为输入,顶点数据是由应用阶段加载到显存中,再由Draw Call指定的。这些数据随后被传递给顶点着色器。
(2),顶点着色器
顶点着色器是完全可编程的,它通常用于实现顶点的空间变换,顶点着色器等功能。曲面细分着色器是一个可选着色器,用于细分图元。几何着色器同样是可选着色器,可以被用于执行逐图元的着色操作,或者被产生于更多的图元。裁剪,这一阶段的目的是将那些不在摄像机视野内的顶点裁剪掉,剔除某些三角图元的面片。这个阶段可配置。屏幕映射,这一阶段不可配置和编程,负责把每个图元的坐标转换到屏幕坐标系中。
顶点着色器的处理单位是顶点,也就是说,输入进来的每个顶点都会调用一次顶点着色器。顶点着色器本身不可以创建或者销毁任何顶点,而且无法得到顶点与顶点直接的关系。Gpu可以利用本身的特性快速处理每一个顶点。
顶点着色器主要完成的工作:坐标变换及逐顶点光照。当然,除此之外还可以输出后续阶段所需的数据等。
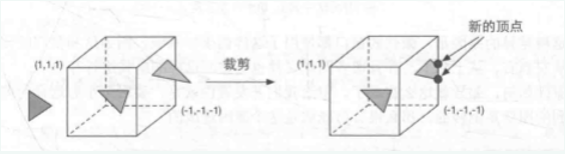
(3),裁剪,一个图元与摄像机的关系有3种:完全在视野内,部分在视野内,完全在视野外。完全在视野内的图元就继续传递给下一个流水线阶段,完全在视野外的图元不会继续向下传递。那些部分在视野内的需要进行裁剪。
(4),屏幕映射
屏幕映射的任务是将裁剪后的齐次坐标(NDC)转换到屏幕坐标系,屏幕坐标系是一个二维坐标系,和用于显示画面的分辨率有很大关系。 屏幕映射如下图示例,将齐次坐标下 -1,1的坐标范围转换到(x1,y1),(x2,y2)。可以看到这个过程实际上就是一个缩放的过程。在这个处理种z轴不做处理。屏幕坐标系和z轴构成了窗口坐标系。这些值会被传到光栅化阶段。
《三》光栅化阶段
(1),三角形设置
这个阶段会计算光栅化一个三角网格所需要的信息。上一个阶段输出的都是三角网格的顶点,即我们得到的是三角网格每条边的两个端点。如果要得到正规三角网格对像素的覆盖情况,就必须计算每条边上的像素坐标。为了能够计算边界像素的坐标信息,就需要得到三角形边界的表示方式。
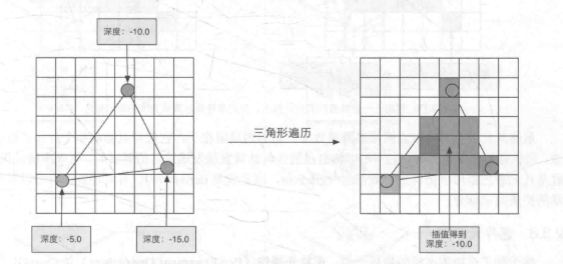
(2),三角形遍历
三角形遍历 阶段将会检查每个像素是否被一个三角网格所覆盖。如果被覆盖的情况下,就会产生一个片元。而这样一个找到那些像素被三角网格覆盖的过程就叫做三角形遍历,也被称作扫描变换。 三角形遍历阶段会根据上一个阶段的计算结果来判断一个三角网格覆盖了哪些像素,并使用三角网格3个顶点的顶点信息对整个覆盖区域的像素进行插值。
(3),片元着色器
片元着色器的输入是上一个阶段对顶点信息插值得到的结果,具体来说是根据那些从顶点着色器中输出的数据插值得到的。而其输出是一个或者多个颜色值。
这一阶段可以完成很多重要的渲染技术,其中最重要的技术之一就是纹理采样。为了在片元着色器中进行纹理采样,我们通常会在顶点着色器阶段输出每个顶点对应的纹理坐标,然后经过光栅化阶段对三角网格的3个顶点对应的纹理坐标进行插值后,就可以得到起覆盖的片元的纹理坐标。
(4),逐片元操作
逐片元操作是OpenGL中的说法,在DX中这个阶段被称作输出合并阶段。
决定每个片元的可见性,涉及很多测试工作,例如深度测试,模板测试。
如果一个片元通过了所有测试后,就需要把这个片元的颜色值和已经储存在颜色缓冲区的色彩进行合并,或者说混合。

(4.1)模板测试
与之相关的是模板缓冲(Stencil Buffer)。模板缓冲和颜色缓冲,深度缓冲几乎是一类东西。如果开启了模板测试,Gpu首先读取(使用读取掩码)模板缓冲区中该片元位置的模板值,然后将该值和读取(使用读取掩码)到的参考值进行比较,这个比较函数可以由开发者指定的,例如小于等于舍弃该片元,或者大于等于舍弃该片元。如果这个片元没有通过测试,该片元就会被舍弃。不管一个片元有没有通过模板测试,我们都可以根据模板测试和之后的深度测试结果来修改模板缓冲区,这个操作也是由开发者指定的。模板测试通常用于限制渲染区域,或者渲染阴影,轮廓渲染等。

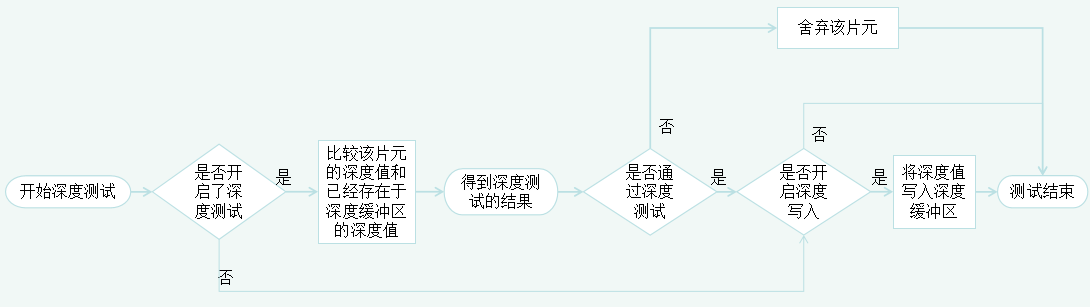
(4.2)深度测试
如果开启了深度测试,Gpu会把该片元的深度值和已经存在于深度缓冲中的深度值进行比较。这个比较函数也是可由开发者设置的,例如小于时舍弃该片元,或者大于时舍弃该片元。通常这个比较函数是小于等于,即如果这个片元的深度大于等于当前深度缓冲区中的值,那么就舍弃它。这是因为我们总想只显示出离摄像机最近的物体,而那些被其他物体遮挡的就不需要出现在屏幕上。和模板测试不同的是,如果一个片元没有通过深度测试,它就没有权利更改深度缓冲区的值。如果一个片元通过了测试,那么开发者可以指定是否要用这个片元的深度值覆盖所有的深度值。
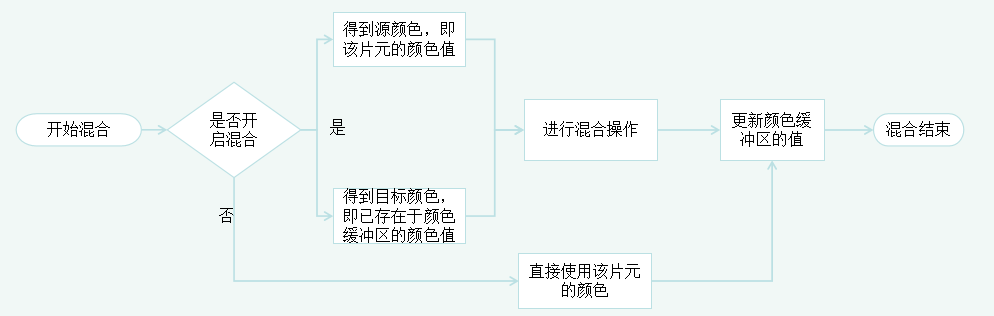
(4.3)合并混合
合并 ,渲染过程是一个物体接着一个物体画到屏幕上,而每个像素的颜色信息被储存在一个名为颜色缓冲的地方。因此,当我们执行这次渲染时,颜色缓冲中往往已经有了上次渲染之后的颜色结果,那么,我们使用这次渲染得到的颜色完全覆盖掉之前的结果还是进行其他处理,就是合并需要解决的。 对于不透明物体,开发者可以关闭混合(Blend)操作。这样片元着色器计算得到的颜色值就会之间覆盖掉颜色缓冲区中的像素值。但对于半透明物体,就需要混合操作来让这个物体看起来是透明的。
(4.4)各种测试的顺序并不是唯一的,虽然从逻辑上来说这些测试是在片元着色器之后进行的,但对于大多数GPU来说,会尽可能在执行片元着色器之前进行这些测试。因为当你在片元着色器进行了大量的计算及设置,最后测试没通过,可以说是计算成本全都浪费了。作为一个想充分提高速度的GPU,肯定是希望尽可能早的指定哪些片元会被舍弃,对这些片元就不再需要在使用片元着色器来计算他们的颜色。Unity的渲染流水中,深度测试就是在片元着色器之前。 但是,如果将这些测试提前的话,其检验结果可能会与片元着色器中的一些操作冲突。例如片元着色器在进行透明度测试,而这个片元没有通过透明度测试,我们会在着色器中调用API(clip)函数来手动将其舍弃。这就导致GPU无法提前执行各种测试。因此,如果片元着色器中的操作和提前测试发生冲突就会禁用提前测试。这样性能上就会下降,也是透明度测试导致性能下降的原因。 当模型图元经过层层计算及测试后,就会显示到屏幕上。我们的屏幕显示的就是颜色缓冲区中的颜色值。但是,为了避免我们看到正在光栅化的图元,GPU会使用双重缓冲策略。对场景的渲染是发生在幕后的,即在后置缓冲中,一旦场景已经被渲染到后置缓冲中,GPU就会交换后置缓冲区和前置缓冲的内容,前置缓冲区就是显示在屏幕上的图像。由此,保证我们看到的图像是连续的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号