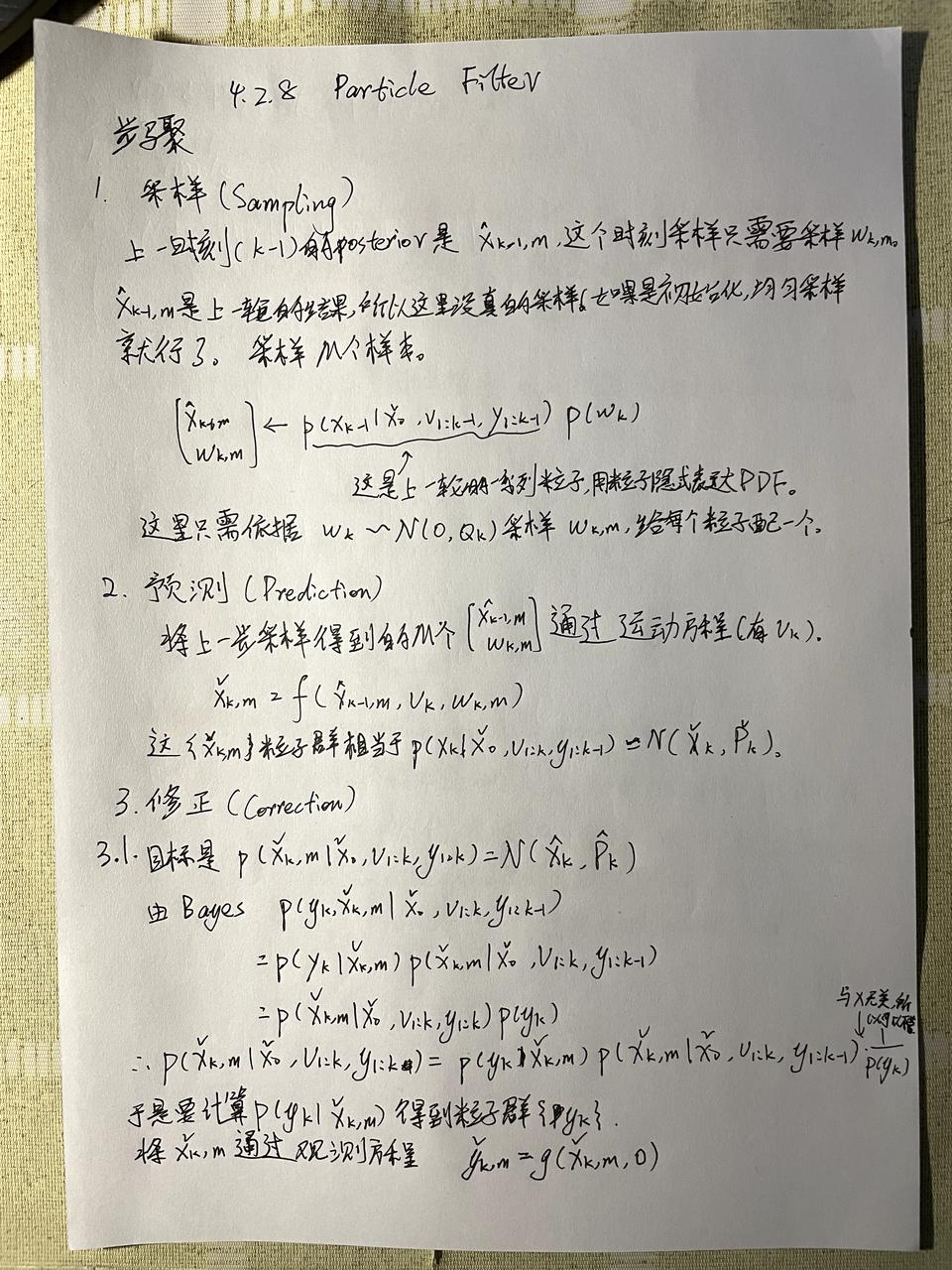
[State Estimation] 4.2.8 Particle Filter
PF 理解不深,若干年前 coursera 上某门课程做了填空式编程题,仅此而已。
重点应该有二:
- weight 定义方法;
- Resampling 方法,减少例子数量,维持系统计算量。
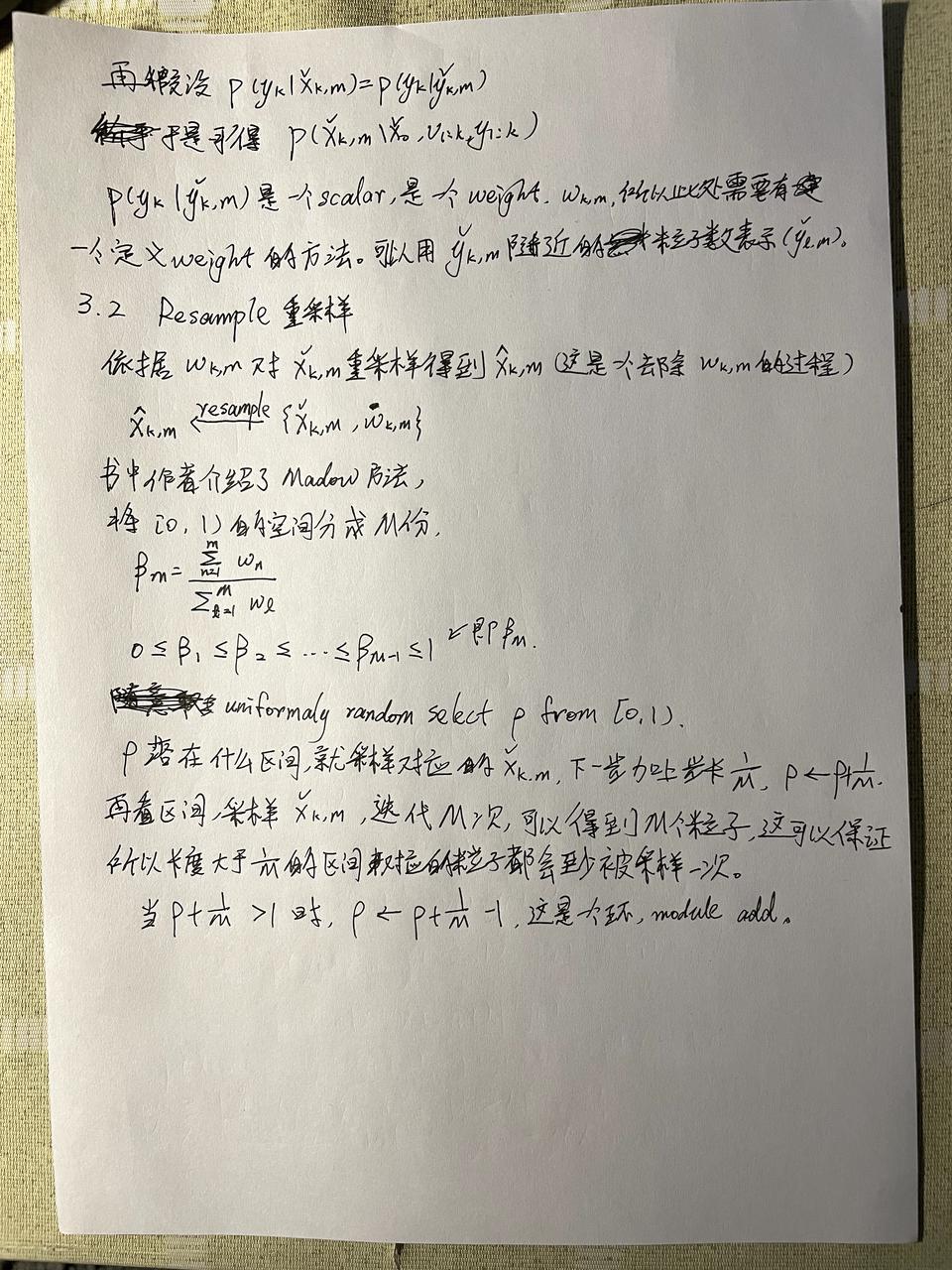
Madow Resampling 图示如下,参考 https://youtu.be/DhxRxG5bSrg?t=164 。

PF 理解不深,若干年前 coursera 上某门课程做了填空式编程题,仅此而已。
重点应该有二:
Madow Resampling 图示如下,参考 https://youtu.be/DhxRxG5bSrg?t=164 。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号