随笔分类 - SLAM
摘要:将高斯 PDF 通过非线性函数,结果使用高斯变换表示。 这涉及到 linearization 。 问题的定义是有 $\mathbf{x}$ 符合高斯噪声(即已知 $p(\mathbf{x})$),有非线性变换 $g(\cdot): \mathbf{x} \to \mathbf{y}$(蕴含 $p(\
阅读全文
摘要:方便理解 Kalman Filter。 看到 https://www.zhihu.com/question/47559783/answer/2980976068 ,想自己推一下。 融合两个 Guassian PDF ,是将两个 Guassian PDF 相乘得到的结果依然是 Guassian PDF
阅读全文
摘要:PF 理解不深,若干年前 coursera 上某门课程做了填空式编程题,仅此而已。 重点应该有二: 1. weight 定义方法; 2. Resampling 方法,减少例子数量,维持系统计算量。  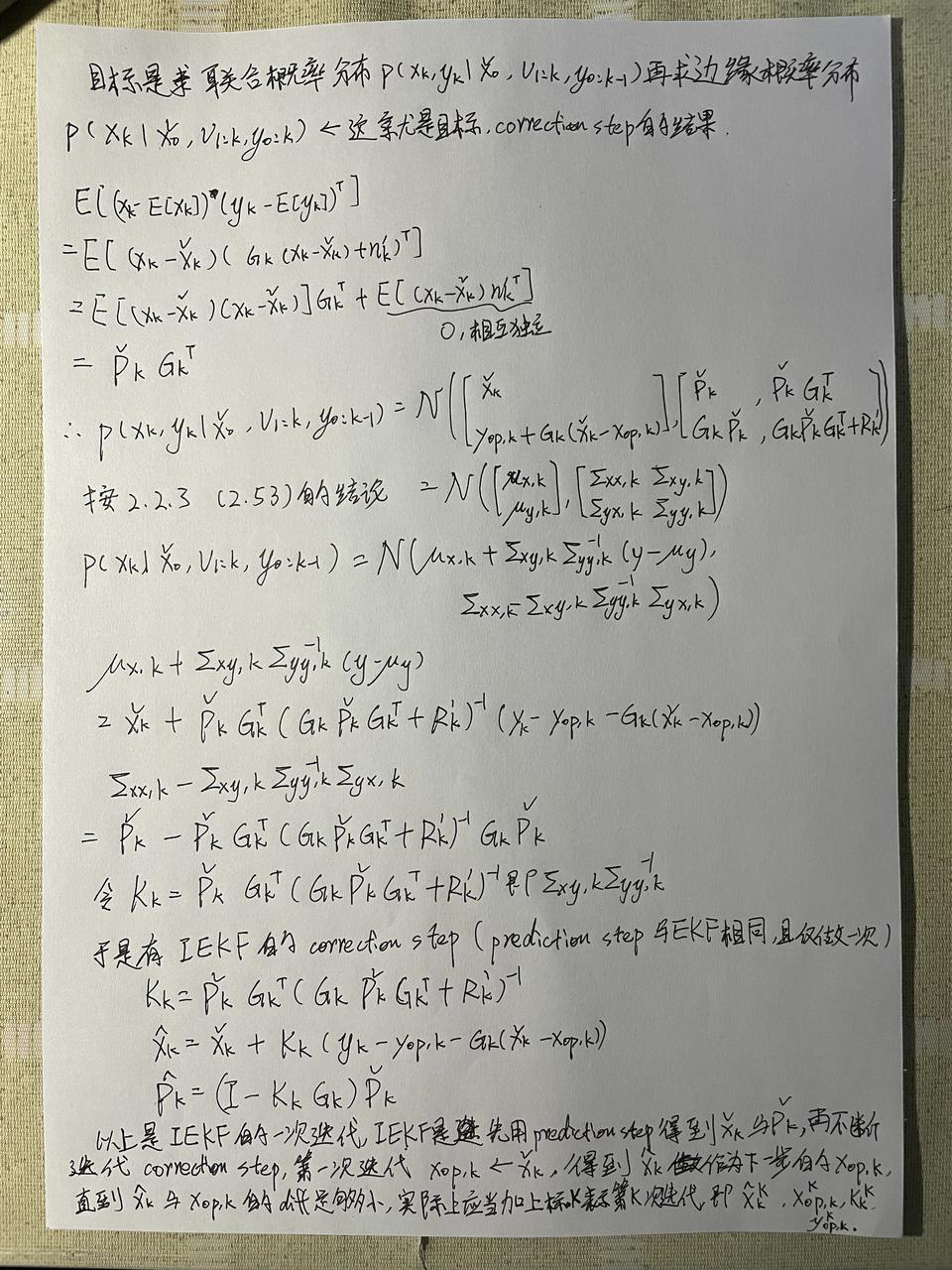
阅读全文
摘要:(2.90) 详细见 [State Estimation] 2.2.8 Passing a Gaussian throught a Nonlinearity 。
阅读全文
摘要:Bayes Filter 是理论模型,给出一个框架。实际使用过程中,加上一系列假设条件,得到实际可以用的 Filter 。 模型是理论的,不能实现体现在两点: PDF(Probability Density) 通过非线性 observation model 与 motion model ; 噪声是
阅读全文
摘要:使用右扰动的方式计算 SLERP 的雅克比。是 SLERP Jacobians (left perturb) 的补充。 1. 推导 2. 验证 使用 ceres-solver 1.14.0 。 代码如下: #include <Eigen/Core> #include <Eigen/Geometry>
阅读全文
摘要:三维空间直线与平面的交点计算与平面方程优化的参数化方法。 ## 1. 线面交点计算 线面交点计算方法有很多种,列出两种,使用何种方法与线面表达的形式有关(形式可以转换,这种关系只涉及便利程度)。 ### 1.1. 方法一 问题描述:有一平面,法向为 $\mathbf{n}$ ,平面上一点 $\mat
阅读全文
摘要:用傅里叶变换做时间对齐,可以参考 [1] [2]。 这里只是说明互相关与卷积的不同,参考 [3] 证明空间域中的卷积与频率域上的乘积。说明时间对齐使用的是互相关,所以在代码中会取共轭。 Reference [1] Delay estimation by FFT. [2] SIGNAL FITTING
阅读全文
摘要:我一般不咋用 g2o,我用 ceres-solver。有人 g2o 的代码看不懂,问我。所以我就帮忙看一下。 sim(3) 的 exponential map 是一个有意思的东西,推了一下。主要参考 [1],辅助参考 [2],也从 Wikipedia 拿了一些简单的结论来用。 1. g2o SE(3
阅读全文
摘要:看了 Joan Solà 的论文 [1],写了博客 《A Micro Lie Theory 论文理解》。自认为对论文理解程度已经可以实用。 找一个以前解决得不好的过程用现在学到的理论处理。SLERP(Spherical Linear intERPolation)过程,在 Joan Solà 的论文
阅读全文
摘要:这篇论文 [1] 比较基础,在很多与 B 样条有关的论文中都能找到对它的引用。 B 样条曲线是参数方程,使用参数 \(t\) 的多项式表达连续曲线。 多项式的计算是递归计算的,k 阶 B 样条的多项式的参数是 k 阶的,需要从 k-1 阶参数计算。可以看回形针视频 [2] 有一个简单的认识。 注意一
阅读全文
摘要:找到一篇 2018 年的论文 [1],是 Quaternion kinematics for the error-state Kalman filter [2] 的作者 Joan Solà 写的。 论文的名字是 A micro Lie theory for state estimation in r
阅读全文
摘要:相机内参数优化中构建的模型需要使用到 distort 过程,是将相机归一化平面直角坐标系上的点(即相机坐标系 Z = 1 上的坐标)进行畸变的过程。之后使用相机内参矩阵变换为 uv 坐标。 undistort 过程一般应用中难以用到,所以一直没有注意。distort 过程的逆映射就是 undisto
阅读全文
摘要:Dual Quaternion 是 "Dual Number" 与 Quaternion(虚数) 的结合。对我而言,这东西可以表示 3 维空间的 Rigid Transformation。 Dual Number 在前面的博客 " [ceres solver] AutoDiff " 已经讲到,就是有
阅读全文
摘要:B 样条曲线用于生成光滑、多阶可导的曲线。 Kalibr 使用 B 样条曲线进行相机与 IMU 的时间对齐。 本文旨在通过对角速度的理解,理解如何将 6 维的 SE(3) 轨迹输入到 B 样条中,利用 B 样条对轨迹进行求导,输出轨迹上任何一点处的角速度。本文不对 B 样条曲线进行介绍,只将 B 样
阅读全文
摘要:本文,从 ceresQuaternionParameterization 入手,在理解 ceresQuaternionParameterization 的基础上形成对 ceres::LocalParameterization 的认识。 ceres-solver 中对 LocalParameteriz
阅读全文
摘要:本文的目的是解析 ceres solver AutoDiff 的实现,说明它是一种类似于 matlab 符号运算的方法。 "ceres solver" 使用 " " 作为计算误差与雅克比的结构。ceres::CostFunction 是一个纯虚类,用户代码继承这个类,并通过实现其纯虚方法 提供使用待
阅读全文
摘要:我对 Error State Kalman Filter 的理解。本文的主要参考文献是 Joan Sola 的 《Quaternion kinematics for the error state Kalman filter》[1],当然是这本小册子,做 VIO 的人都会熟读这本册子。 1. ErK
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号