计算几何
内容讲解的博客: 计算几何初步
下面我们来逐步学习计算几何。
前置技能
先补充点英语:
slope 斜率
intersection 交点
half plain intersection 半平面交(hpi)
area 面积
再看一段代码:
struct vectors {
double x;
double y;
vectors(double xx = 0, double yy = 0) {x = xx, y = yy; }
vectors operator +(const vectors a)const {
return vectors(x + a.x, y + a.y);
}
vectors operator -(const vectors a)const {
return vectors(x - a.x, y - a.y);
}
double operator *(const vectors a)const {
return x * a.y - y * a.x;
}
inline double get_len2() {
return Fang(x) + Fang(y);
}
inline double get_len() {
return sqrt(get_len2());
}
inline Vectors get_unit() {//单位向量
double l = get_len();
return Vectors(x / l, y / l);
}
inline Vectors rot90() {//逆时针旋转90度
return Vectors(-y, x);
}
};
inline double get_dis(vectors a, vectors b) {//两点间距离
return sqrt((a.x - b.x) * (a.x - b.x) + (a.y - b.y) * (a.y - b.y));
}
inline double dot(vectors a, vectors b) {//点乘
return a.x * b.x + a.y * b.y;
}
inline double len(vectors a) {//模长
return sqrt(a.x * a.x + a.y * a.y);
}
inline vectors turn(vectors a, double n) {//旋转n
return vectors(a.x * cos(n) - a.y * sin(n), a.x * sin(n) + a.y * cos(n));
}
inline double dis(const vectors a, const vectors b, const vectors x) {//x点到线段ab的距离
return fabs(1.0 * ((a - x) * (b - x)) / get_dis(a, b));
}
inline vectors jiaodot(vectors A, vectors B, vectors C, vectors D) {//求线段交点
//double t1 = AC * AB, t2 = AB * AD;
double t1 = (C - A) * (B - A), t2 = (B - A) * (D - A);
//double t3 = CA * CD, t4 = CD * CB
return vectors((C.x * t2 + D.x * t1) / (t1 + t2), (C.y * t2 + D.y * t1) / (t1 + t2));
/* 非严格相交:
叉积为0,说明共线。
1.4个叉积都为0: 4点共线
2.2个叉积为0: 三个共线,一个共点
3.1个叉积为0:三点共线 //先判断点是否在线段上,让后与情况2合并
*/
}
inline vectors get_intersection(segments ab, segments cd){//直线相交,无需判断叉积为0的情况,但需保证无平行直线
vectors A = ab.a, B = ab.b, C = cd.a, D = cd.b;
double t1 = (C - A) * (B - A), t2 = (B - A) * (D - A);
//AC -> AB -> AD,顺则同顺,逆则同逆
return vectors(C.x * t2 + D.x * t1) / (t1 + t2), (C.y * t2 + D.y * t1) / (t1 + t2));
//= C + CD * t1 / (t1 + t2)
//= (t1 * D + t2 * C) / (t1 + t2) 定比分点
}
inline void work(Vectors Ou, double ru, Vectors Ov, double rv) {//两圆交点,存到 vec 里
double d = (Ou - Ov).get_len();
if (sign(d - (ru + rv)) > 0) return ;
if (sign(d - F(ru - rv)) < 0) return ;
double l = (Fang(ru) + Fang(d) - Fang(rv)) / (2.0 * d);//余弦定理
double tmp = Fang(ru) - Fang(l);
double h = tmp < eps ? 0 : sqrt(tmp);
Vectors dir = (Ov - Ou).get_unit();
Vectors vt = Ou + Mul(dir, l), dr = Mul(dir.rot90(), h);
vec[++vtot] = vt + dr, vec[++vtot] = vt - dr;
}
总而言之,我们可以用向量的缩放、旋转等操作来干好多事情。
2021.3.23 Update:
补充一点东西:
向量旋转 \(\alpha\) 角:把向量 \((x,y)\) 看作复平面上的复数,然后乘上 \(e^{\alpha i}\)
欧拉公式:\(V-E+F=1+C\):平面图的点数 - 边数 + 面(区域)数 = 1 + 平面图的连通块数。可以很方便地解决一些数区域数的问题。
三角剖分
利用叉积的几何意义(平行四边形的有向面积)以及容斥的思想来实现。
实现其实非常简单:
位置判断
如何判断一个点在一条直线的左边还是右边还是直线上?
直接叉积。
在一条直线上,如何判断点是在一个线段上还是线段两边?
直接点积。
如何判断两个点是否在一条直线的两端?
跨立实验。分别判断每个点对于直线的方向,分类讨论即可。
如何判断一个点在凸包内部还是外部?
尝试将其加入凸包,成功则为外部,否则为内部
如图
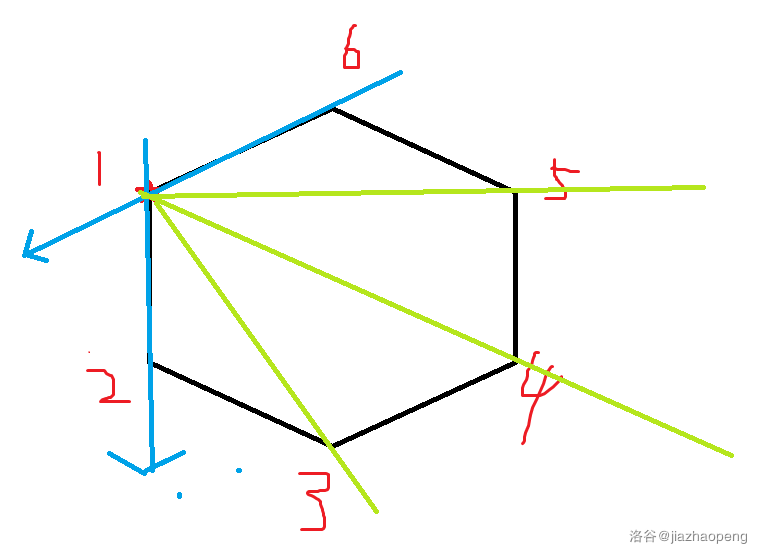
以1号点为基准,将平面分割成若干区域,蓝线右边的区域可以直接特判,内部的区域可以 lower_bound 快速查找点所在的区域,判断是否在凸包内部即可。
复杂度:\(O(nlogn+qlogn)\)
//tmp[] 存一个凸包
vectors vec[N];
vectors bian1, bian2;//两边界
inline void build() {
bian1 = tmp[2] - tmp[1], bian2 = tmp[1] - tmp[tot];//Attention!! - not =
for (register int i = 2; i <= tot;++i) vec[i] = tmp[i] - tmp[1];
}
inline ll dot(vectors a, vectors b) {
return 1ll * a.x * b.x + 1ll * a.y * b.y;
}
inline bool che(int x, int y) {
vectors v(x, y);
if ((v - tmp[1]) * bian1 > 0) return false;
if ((v - tmp[1]) * bian2 > 0) return false;
int p = lower_bound(vec + 2, vec + tot + 1, v - tmp[1]) - vec;//Attention!! : v - tmp[1]
if ((v - tmp[1]) * (vec[p] - v) == 0) {
if (dot(v - tmp[1], vec[p] - v) >= 0) return true;
else return false;
}
if ((tmp[p] - v) * (v - tmp[p - 1]) == 0) return true;
if ((tmp[p] - tmp[p - 1]) * (v - tmp[p - 1]) > 0) return true;
return false;
}
如何判断一个点在多边形内部还是外部?
从这个点引一条射线,扫一遍所有边,判断是否和这条射线相交(或者从无穷远的地方选一个点作为射线另一端点,依次做跨立实验),如果相交数量为奇数,则在内部,否则在外部。
复杂度:\(O(qn)\)
处理特殊情况:上开下闭,平行就直接不算。即认为多边形向上移 eps。就不用写随机化了。
凸包
- 凸包性质:
-
周长最小,并且能包围所有给定点。
-
如果按逆时针方向看,凸包上每两条相邻的边都是向左拐的。也就是说,逆时针枚举边,相邻边应该逆时针转,叉积大于0。
- 凸包的求法
例题:P2742 【模板】二维凸包 / [USACO5.1]圈奶牛Fencing the Cows
利用凸包的性质2,我们将各点按横坐标排序,然后从左向右求下凸包,从右向左求上凸包。
具体来说,用单调栈维护凸包,用凸包的性质2来判断是否合法。
\(Code:\)
sort(v + 1, v + 1 + n, cmp);
sta[++top] = 1;//vis[1]先不等于0
for (register int i = 2; i <= n; ++i) {//升序枚举下凸壳(凸壳逆时针)
while (top > 1 && (v[sta[top]] - v[sta[top - 1]]) * (v[i] - v[sta[top]]) <= 0) {
vis[sta[top--]] = false; //叉积<0,共线或顺时针旋转,不符合要求
}
vis[i] = true;
sta[++top] = i;
}
int tmp = top;//防止弹掉下凸壳的栈顶元素
for (register int i = n - 1; i; --i) {//降序枚举上凸壳(凸壳逆时针)
if (vis[i]) continue;
while (top > tmp && (v[sta[top]] - v[sta[top - 1]]) * (v[i] - v[sta[top]]) <= 0) {
vis[sta[top--]] = false;
}
vis[i] = true;
sta[++top] = i;
}
//此时sta数组存储凸包上的点编号,sta[1] = sta[top] = 起始点
memcpy(oldv, v, sizeof(v));
for (register int i = 1; i <= top; ++i)
v[i] = oldv[sta[i]];
注意一下细节。时间复杂度:O(nlogn)(排序)
习题:
其实这三道题是一种题型。其中信用卡凸包难度较大,涉及到向量旋转。所以我认为先做城墙为宜
动态凸包的维护(支持加点)。用set代替stack维护即可。
注意:
首先先不让vis[1]=true;最后的sta数组sta[1] = sta[n]。
记得双关键字排序!!!!! 第二关键字怎么排序都行,但就是要求有序!!!
旋转卡壳
旋转卡壳可以求凸包直径等问题。
例题:P1452 Beauty Contest /【模板】旋转卡壳
具体操作是:枚举每条边,找出边的对踵点,计算对踵点到边两端点距离,直径的长就一定会在这些距离中了。
如果我们逆时针枚举边,那么对踵点一定会逆时针地出现,符合单调的性质。又因为逆时针枚举对踵点,点到边的距离是单峰函数,所以我们找对踵点可以单方向枚举,搞一个类似于单调栈的东西。最后直径就取一个 \(max\) 即可。
- 注意:
-
不要让枚举的对踵点超出范围,要搞一个循环。
-
当“凸包”只有两个点时,这个算法会陷入死循环。所以要实现判一下有没有凸包。
-
求出凸包后,v[1] = v[top] = 最左下点
\(Code:\)
inline double get_h(vectors A, vectors b, vectors c) {
return F((b - A) * (c - A)) / get_len(b - c);
}
...
if (top - 1 <= 2) {
ans = get_len(v[1] - v[2]);
...
return 0;
}
int id = 1;
for (register int i = 1; i < top; ++i) {
while (get_h(v[id], v[i], v[i + 1]) <= get_h(v[id + 1], v[i], v[i + 1])) {
id++;
if (id == top) id = 1;
}
ans = max(ans, max(get_len(v[id] - v[i]), get_len(v[id] - v[i + 1])));
}
- 旋转卡壳还可以做很多事情,比如
- 求覆盖凸包的最小矩形面积:
UVA10173 Smallest Bounding Rectangle
- 求所有点中能组成的最大四边形面积
(大多是猜想答案在对踵点上,然后用旋转卡壳来做)
半平面交
求同在多个直线的 左边 的点集。
极角排序
因为这里涉及到了对一堆平面内的线段排序,我们适用极角排序。需要使用atan2(double y, double x)函数。(注意先是y后是x);
当极角一样是,我们按照从左到右的顺序排序(因为只有最左边的直线有用,使用时判一下 if (s[i].slop != s[i - 1].slop) 即可)。
维护双端队列
根据极角将直线逐个加入到单调队列里面。加入前判断队尾交点是否在当前直线的右边,如果交点都在右边,说明队尾直线就没用了,直接删掉就好。考虑到可能当前直线可能会约束队首,因此也要判断一下队首的直线交点是否在右边,在则删除。
最后,可能队尾会有一些不合法的直线,用队首排除队尾,再用队尾排除队首即可。
\(Code:\)
inline vectors inter(segments ab, segments cd) {
vectors A = ab.a, B = ab.b, C = cd.a, D = cd.b;
double t1 = (C - A) * (B - A), t2 = (B - A) * (D - A);//AC -> AB -> AD
//attention!!!
return vectors((C.x * t2 + D.x * t1) / (t1 + t2), (C.y * t2 + D.y * t1) / (t1 + t2));
}
bool cmp(const segments &a, const segments &b) {
if (a.slop != b.slop) return a.slop < b.slop;
return (a.b - a.a) * (b.b - a.a) < 0;
}
inline bool che(segments ab, segments cd, segments l) {
vectors inters = inter(ab, cd);
return (l.b - l.a) * (inters - l.a) <= 0;
}
int main() {
...(get in)
for (register int i = 1; i <= tot; ++i) {
vectors vec = s[i].b - s[i].a;
s[i].slop = atan2(vec.y, vec.x);
}
sort(s + 1, s + 1 + tot, cmp);
que[++rear] = s[1];
for (register int i = 2; i <= tot; ++i) {
if (F(s[i].slop - s[i - 1].slop) < eps) continue;
while (front < rear - 1 && che(que[rear - 1], que[rear], s[i])) rear--;
while (front + 1 < rear && che(que[front + 1], que[front + 2], s[i])) front++;
que[++rear] = s[i];
}
while (front < rear - 1 && che(que[rear], que[rear - 1], que[front + 1])) rear--;
while (front + 1 < rear && che(que[front + 1], que[front + 2], que[rear])) front++;
int top = 0;
que[rear + 1] = que[front + 1];
for (register int i = front + 1; i <= rear; ++i) {
inters[++top] = inter(que[i], que[i + 1]);
}
注意!!
-
要先排除队尾,后排除队首,不然据说会出错。
-
判断交点记得是
t1 = AC * AB, t2 = AB * AD;,就这样写,不然会奇怪地出错。我也不知道为啥,可能这种写法对处理直线不仅只在第一象限,或者直线所用线段不交等情况更有优势吧。 -
此时\(cnt,tot,top,front, rear\)等变量名较多,注意区分。
练习题
猜想发现答案一定存在一些特殊点:拐点上,因此求出半平面交,然后 \(n^2\) 枚举特殊点都行。
注意 添加左右边界 以算出边界交点。(当然,这也是半平面交中的常见做法)
最小圆覆盖(随机增量法)
给定一个点集,要用最小的圆覆盖所有点。
显然,点集中一定有至少两个点再这个最小的圆上。并且,如果我们知道其中的三个点,就能知道这个圆。于是我们已经会写 \(O(n^3)\) 的暴力了。
正解依赖随机化算法。随机打乱点。先枚举一个不在当前圆上的点 \(P_i\),并且把当前圆设定为圆心为 \(P_i\),半径为 0 的圆。再从 \(1\) 到 \(i\) 枚举一个不在圆上的点 \(P_j\),并且把当前圆设定为直径为两点连线的圆。然后再从 \(1\) 到 \(j\) 枚举一个不在圆上的点 \(P_k\),并且把当前圆设定为过 \(P_i, P_j, P_k\) 的圆。循环结束不清空圆,最终答案即为所求圆。
复杂度:期望 \(O(n)\)
伪代码:
//C 为圆
for (i) if (i 不在 C 内) {//O(n) * (O(3/i) * O(i)) = O(n)
C = i 这个点
for (j < i) if (j 不在 C 内) {//O(i) * (O(2/j) * O(j)) = O(i)
C = 以 ij 为直径的圆
for (k < j) if (k 不在 C 内) {//O(j)
C = 过 i,j,k 的圆
}
}
}
关键代码:
//fan() : 翻转90度:(x, y) -> (y, -x)
inline vectors get_inter(vectors a, vectors b, vectors c, vectors d) {//求中垂线交点
vectors mid = get_mid(a, b);
b = mid + (b - a).fan();
a = mid;
mid = get_mid(c, d);
d = mid + (d - c).fan();
c = mid;
double t1 = (c - a) * (b - a), t2 = (b - a) * (d - a);
return vectors((c.x * t2 + d.x * t1) / (t1 + t2), (c.y * t2 + d.y * t1) / (t1 + t2));
}
inline Circle get_cir(vectors a, vectors b, vectors c) {
if (F((b - a) * (c - b)) <= eps) return Circle(vectors(0, 0), 0);
vectors vec = get_inter(a, b, b, c);
return Circle(vec, (vec - a).get_len());
}
(int main())
...
random_shuffle(h + 1, h + 1 + n);
Circle cir(vectors(0, 0), 0.0);
for (register int i =1 ; i <= n; ++i) {
if (!cir.che(h[i])) {
cir = Circle(h[i], 0);
for (register int j = 1; j < i; ++j) {
if (!cir.che(h[j])) {
cir = Circle(get_mid(h[i], h[j]), 0.5 * (h[j] - h[i]).get_len());
for (register int k = 1; k < j; ++k) {
if (!cir.che(h[k])) {
cir = get_cir(h[i], h[j], h[k]);
}
}
}
}
}
}
}
闵可夫斯基和
已知两凸包 \(A, B\),求一个凸包 \(C\),满足 \(\forall p \in A, p' \in B, (p+p') \in C\)。
我们同时从两个凸包的最左边(或左上角之类的)开始走(事先已经合成了 \(C\) 中对应的那个点),每次选择两个凸包中最靠“右”的那一条边在 \(C\) 上走,最终走回原来的那个点,所形成的那个凸包即为 \(C\)。最后最好再把 \(C\) 扔回去再求一遍凸包,去掉一些重边。
闵可夫斯基和可以处理凸包与凸包是否有公共点问题:将凸包 \(B\) 关于原点对称,\(A, B\) 做一遍闵可夫斯基和,合成一个凸包 \(C\),查询 \((0, 0)\) 是否在 \(C\) 内即可。原理:公共点 \((x, y)\) -> \((x, y) + (-x, -y) = 0\)。
关键代码:
int t1, t2, tot;
vectors tmp[N];
inline void Merge() {
tot = 0;
t1 = t2 = 1;
tmp[++tot] = h1[t1] + h2[t1];
while (t1 <= n && t2 <= m) {
if ((h1[t1 + 1] - h1[t1]) * (h2[t2 + 1] - h2[t2]) >= 0)
++tot, tmp[tot] = tmp[tot - 1] + (h1[t1 + 1] - h1[t1]), ++t1;
else ++tot, tmp[tot] = tmp[tot - 1] + (h2[t2 + 1] - h2[t2]), ++t2;
}
while (t1 <= n)
++tot, tmp[tot] = tmp[tot - 1] + (h1[t1 + 1] - h1[t1]), ++t1;
while (t2 <= m)
++tot, tmp[tot] = tmp[tot - 1] + (h2[t2 + 1] - h2[t2]), ++t2;
get_tubao(tmp, tot - 1);
tot = top - 1, top = 0;
}
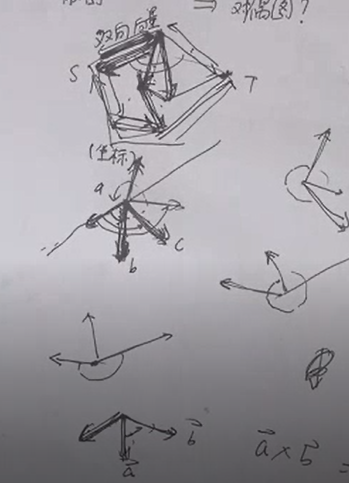
平面图转对偶图
众所周知,平面图最小割 = 对偶图最短路,因此平面图转对偶图可以优化网络流。
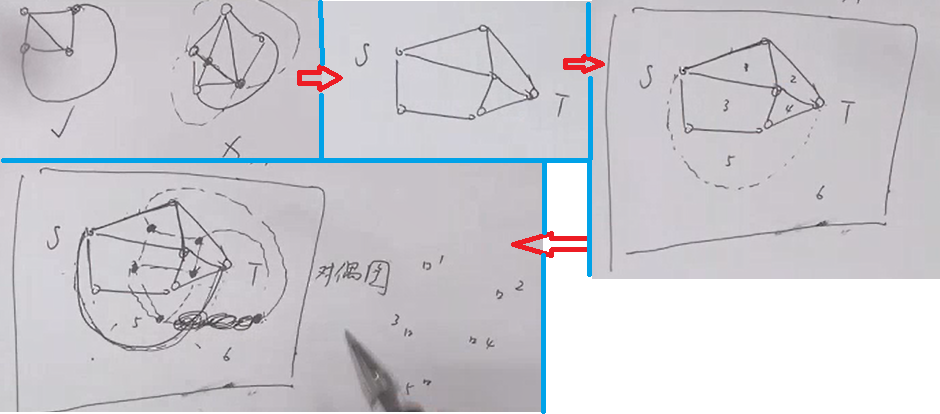
然而有时候平面图并不一定是网格图,对偶图也不一定只用在网络流。对偶图还可以把平面区域转化为点,把平面区域之间的边转化为边,方便做题。
最小左转法
先去除平面图中多余的边,然后把平面图的边拆成双向边,随便选择一条没有经过的边,从它开始,从出点的出边里面选择这条边对应边的顺时针方向第一条边,将其作为下一条边,直到围成一个区域。然后继续这种操作直到所有边都被经过。
“下一条边”可以通过极角排序维护,区域的面积可以通过三角剖分求,注意有一个“无限大”区域,其面积为负数(整个平面图的面积的相反数)
例题:
P3249 [HNOI2016]矿区
建对偶图 + 生成树上容斥
关键代码:
struct Edge{
int v, id; double deg;
Edge(int uu, int vv, int idd, double degg) { v = vv, id = idd, deg = degg; }
Edge(int uu, int vv, int idd) {
v = vv, id = idd;
vectors vec = vt[vv] - vt[uu];
deg = atan2(vec.y, vec.x);
}
bool operator <(const Edge a) const {
return deg - a.deg < -eps;
}
};
vector<Edge> E[N];
int opppos[NN], opid[NN], Nxtpos[NN];
//pos:下标;id:编号
inline void init() {//预处理“下一条边”
for (register int i = 1; i <= n; ++i)
sort(E[i].begin(), E[i].end());
for (register int cur = 1; cur <= n; ++cur) {
for (register uint i = 0; i < E[cur].size(); ++i) {
int to = E[cur][i].v, nwe = E[cur][i].id;
int tmp = lower_bound(E[to].begin(), E[to].end(), Edge(to, cur, opid[nwe])) - E[to].begin();
opppos[nwe] = tmp;
if (tmp == 0) tmp = E[to].size() - 1;
else --tmp;
Nxtpos[nwe] = tmp;
}
}
}
inline void build() {
//找出所有区域并标记原图“边”左右区域
for (register int i = 1; i <= n; ++i) {
for (register uint j = 0; j < E[i].size(); ++j) {
int nwe = E[i][j].id;
if (lft[nwe]) continue;
++ctot;
int np = i, nxtp = E[i][j].v;
S[ctot] += vt[np] * vt[nxtp];
lft[nwe] = ctot, rgt[opid[nwe]] = ctot;
do {
Edge tmp = E[nxtp][Nxtpos[nwe]];
np = nxtp; nxtp = tmp.v;
nwe = tmp.id;
S[ctot] += vt[np] * vt[nxtp];
lft[nwe] = ctot; rgt[opid[nwe]] = ctot;
} while (nxtp != i);
if (S[ctot] < 0) Rt = ctot;
}
}
}
#2965. 保护古迹
点被围起来 = 点不与最外面联通
因此建立对偶图,暴力枚举点集,求最小割。
多源点最小割?超级源点!
#2960. 跨平面
建对偶图 + (无根)最小树形图。
平面图上点定位
在学了...
计算几何中需要注意的东西
-
计算几何中经常用到小数运算,这时注意精度问题(记得加 \(eps\))。判相等的时候用绝对值差不超过 \(eps\) 来判断,但是判大小的时候不能这么用,应该直接判大小!!
-
在求凸包和旋转卡壳的while中,注意是<=而不是<。
-
注意叉乘乘出来的是有向面积!
-
\(a, b, x, y\) 之类的注意一下,不要打错字母了!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号