转载--CAN通信的位定时与同步
依照瑞萨公司的《CAN入门书》的组织思路来学习CAN通信的相关知识,并结合网上相关资料以及学习过程中的领悟整理成笔记。好记性不如烂笔头,加油!
1 位定时
1.1 比特率和波特率
1) . 位速率:又叫做比特率(bit rata)、信息传输率,表示的是单位时间内,总线上传输的信息量,即每秒能够传输的二进制位的数量,单位是bit per second。
2)波特率:又叫做传码率、信号传输率,表示的是单位时间内传输的码元的数量,当两相调制时,一个码元用一个二进制位表示,此时波特率在数值上和比特率是一样的,CAN总线正是两项调制这种情况。
Tips: 比特率和波特率并不是一回事儿,这一定一定要牢记。
1.2 位时间
1.2.1 位时间的概念
位时间:表示的是一个二进制位在总线上传输时所需要的时间。
所以:
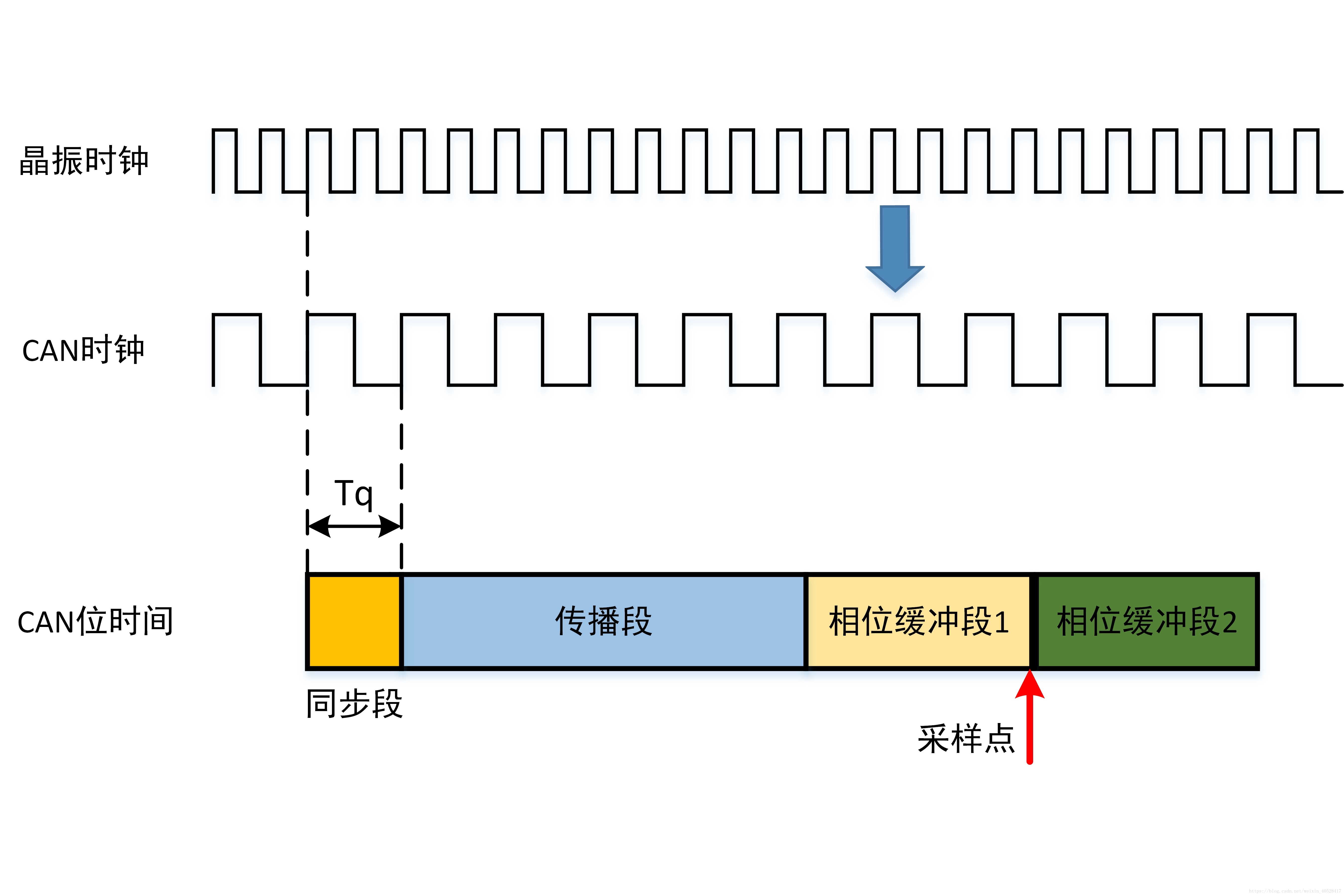
首先了解以下CAN总线系统中的两个时钟:晶振时钟周期和CAN时钟周期
- 晶振时钟周期:是由单片机振荡器的晶振频率决定的,指的是振荡器每震荡一次所消耗的时间长度,也是整个系统中最小的时间单位。
- CAN时钟周期:CAN时钟是由系统时钟分频而来的一个时间长度值,实际上就是一个时间份额Tq。可以按照下面的公式计算:
CAN时钟周期=2×晶振时钟周期×BRPCAN时钟周期=2×晶振时钟周期×BRP
其中BRP叫做波特率预分频值(baudrate prescaler)。
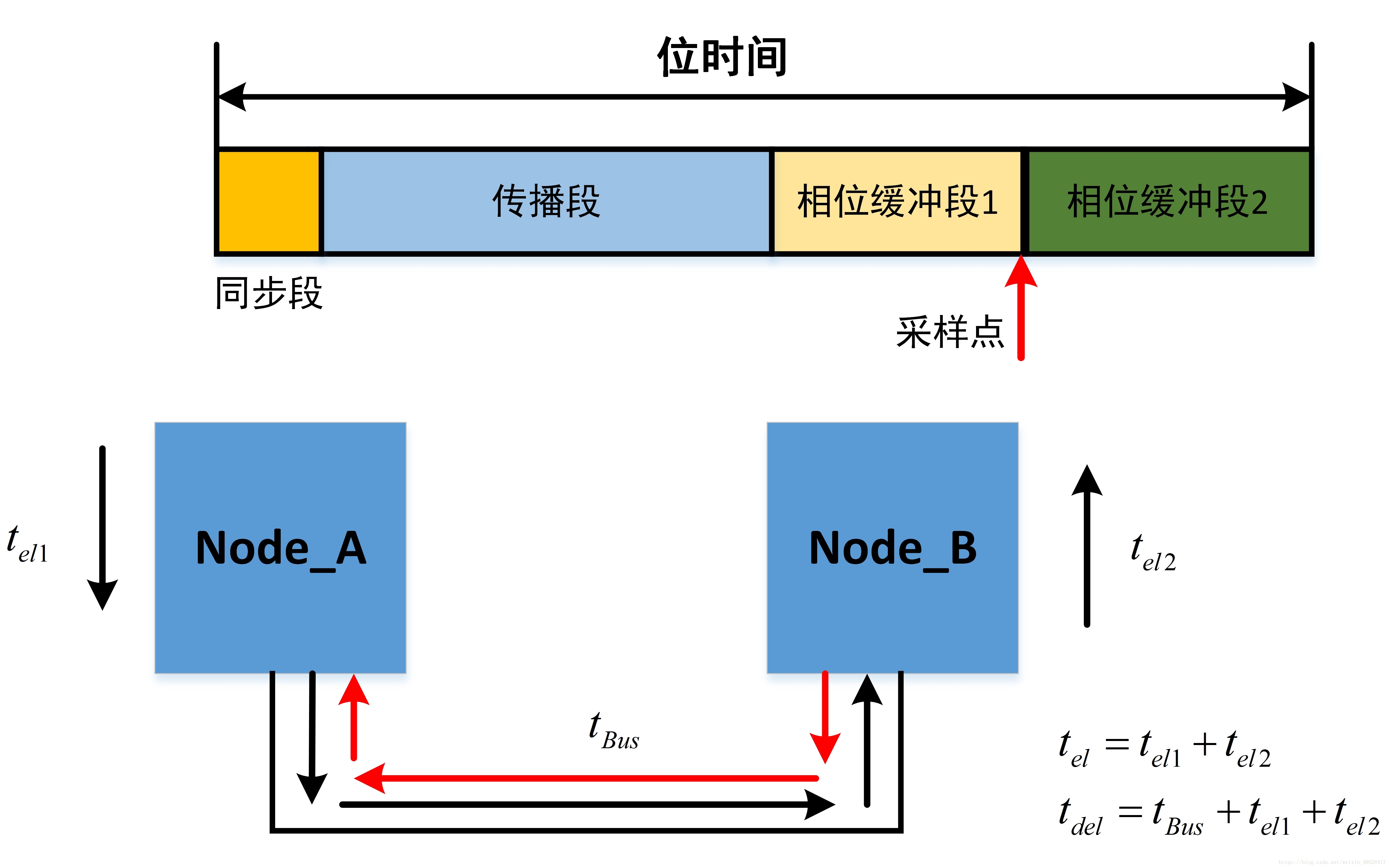
1.2.2 位时间的分段
如上文所述,在CAN的位定时中,一个CAN时钟周期称为一个时间量子 — Tq。
如下图所示:位时间分为四个段:同步段、传播段、相位缓冲段1、相位缓冲段2,总共8~25个时间量子(Tq)。
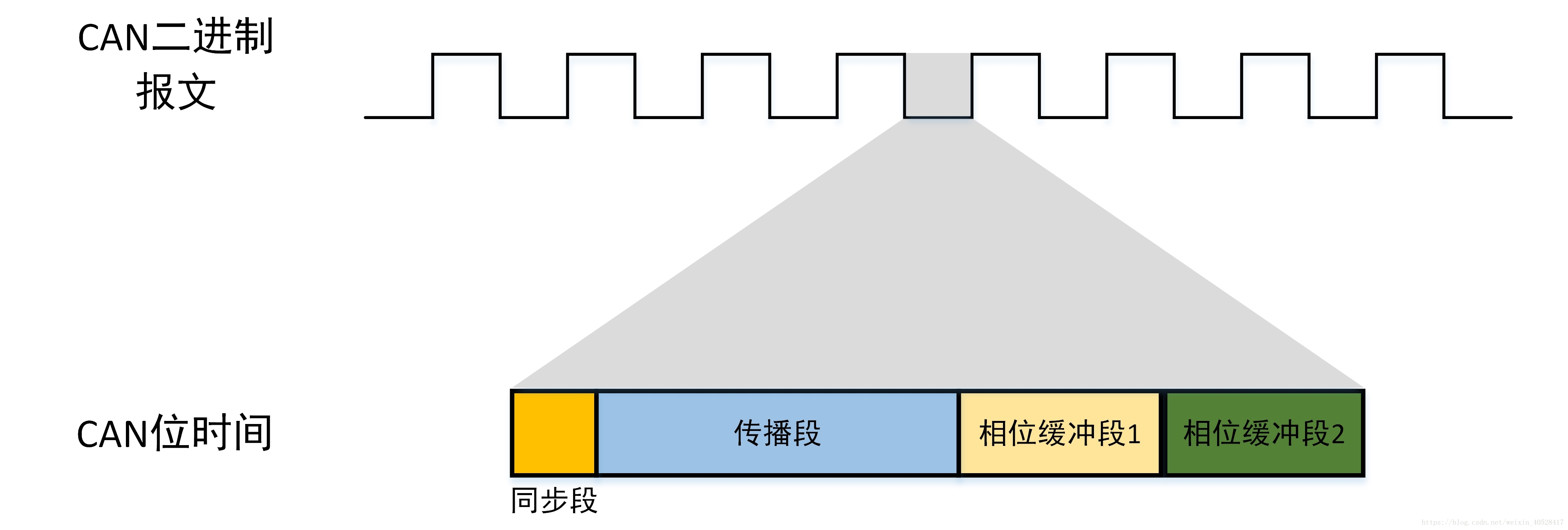
1)同步段(Synchronization Segment):
- 长度固定,1个时间量子Tq;
- 一个位的传输从同步段开始;
- 同步段用于同步总线上的各个节点,一个位的跳边沿在此时间段内。
2)传播段(Propagation Segment):
- 传播段用于补偿报文在总线和节点上传输时所产生的时间延迟;
- 传播段时长 ≥ 2 × 报文在总线和节点上传输时产生的时间延迟 ;
- 传播段时长可编程(1~8个时间量子Tq)。
3)相位缓冲段1(Phase Buffer Segment1):
- 用于补偿节点间的晶振误差;
- 允许通过重同步对该段加长;
- 在这个时间段的末端进行总线状态的采样;
- 长度可编程(1~8个时间量子Tq)
4)相位缓冲段2(Phase Buffer Segment2):
- 用于补偿节点间的晶振误差;
- 允许通过重同步对该段缩短;
- 长度可编程(1~8个时间量子Tq)
于是
tBit:位时间
tSS:同步段时间
tPS:传播段时间
tPBS1:时间段1
tPBS2:时间段2
2 CAN的同步机制
在CAN通信中,有两种同步机制:硬同步与重同步。
2.1 同步的规则
☆ 一个位时间内只允许一种同步方式,要么硬同步要么重同步;
☆ 任何一个从“隐性”到“显性”的下降沿 都可以用于同步;
☆ 硬同步发生在报文的SOF位,所有接收节点调整各自当前位的同步段,使其位于发送的SOF位内;
☆ 重同步发生在一个报文SOF位之外的其它段,当下降沿落在了同步段之外时发生重同步;
☆ 在SOF到仲裁场发送的时间段内,如果有多个节点同时发送报文,那么这些发送节点对跳变沿不进行重同步
Note:
硬同步
硬同步只在总线空闲时通过一个下降沿(帧起始)来完成,此时不管有没有相位误差,所有节点的位时间重新开始。强迫引起硬同步的跳变沿位于重新开始的位时间的同步段之内。
重同步
在消息帧的随后位中,每当有从“隐性位”到“显性位”的跳变,并且该跳变落在了同步段之外,就会引起一次重同步。重同步机制可以根据跳变沿增长或者缩短位时间以调整采样点的位置,保证正确采样。
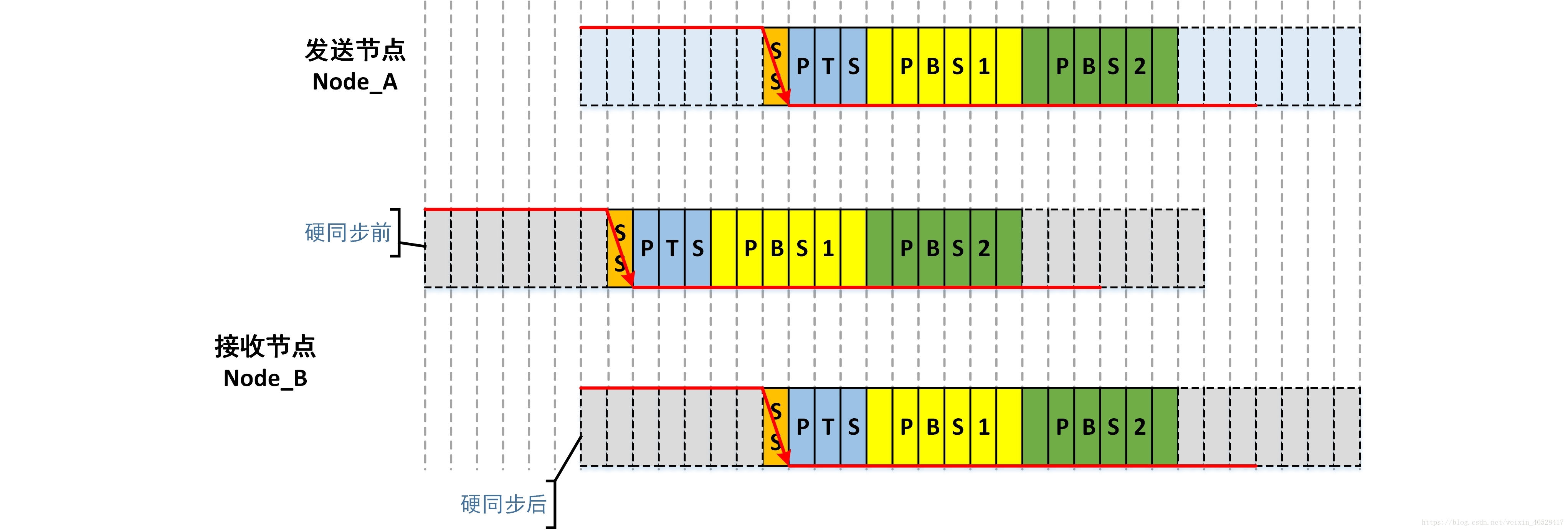
2.2 硬同步
硬同步发生在SOF位,所有接收节点调整各自当前位的同步段,调整宽度不限
(1)发送节点Node_A在发送SOF位时,SOF位的下降沿在SS段;
(2)这个时候接收节点Node_B发现自己当前位的SS段和发送节点SOF位的SS段不同步。也就是说当Node_A产生SOF位SS段时,Node_B的当前位的SS段已经在5个Tq之前产生了;
(3)于是接收节点Node_B强行将自己当前位的SS段拉到与SOF位的SS段同步。
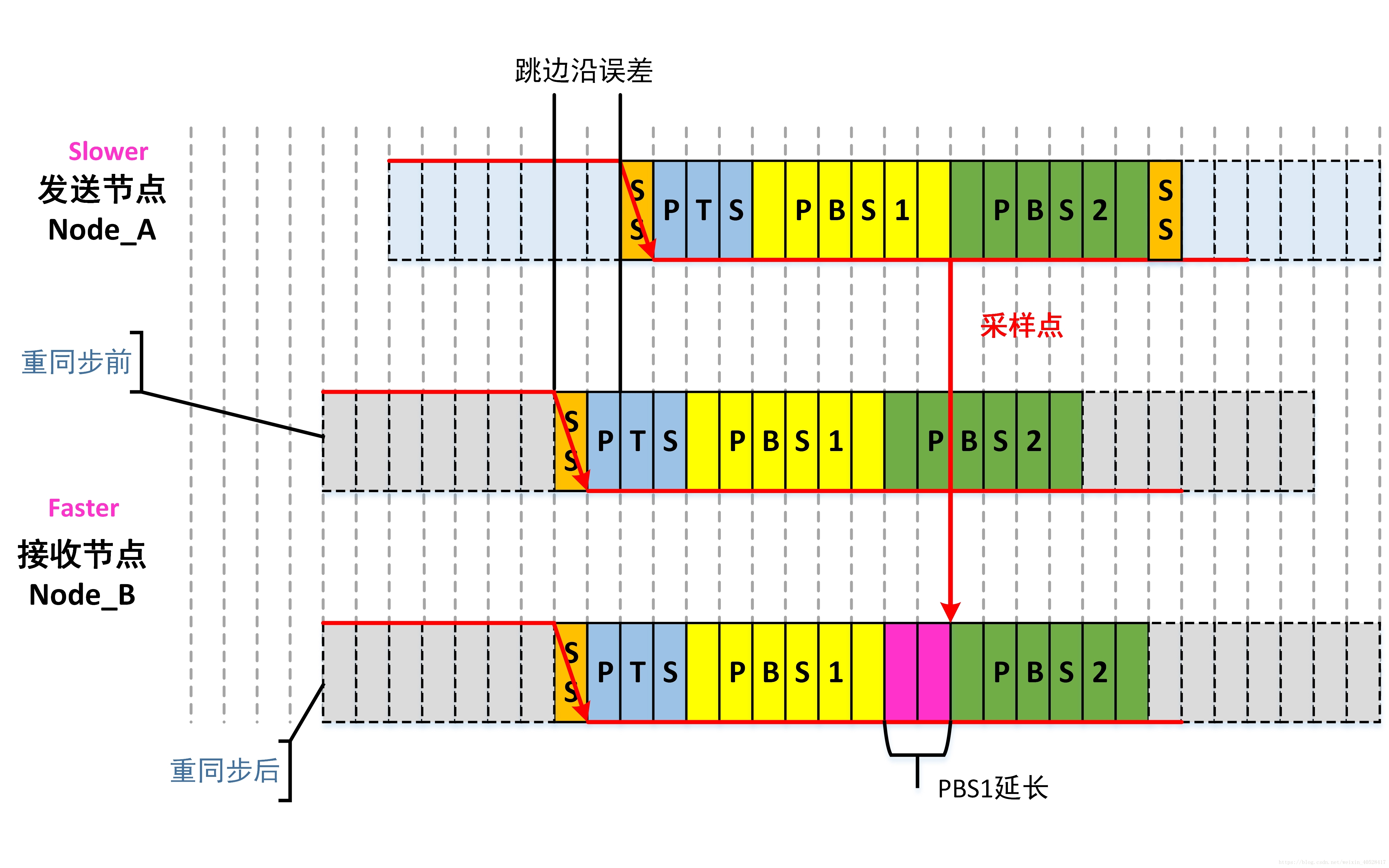
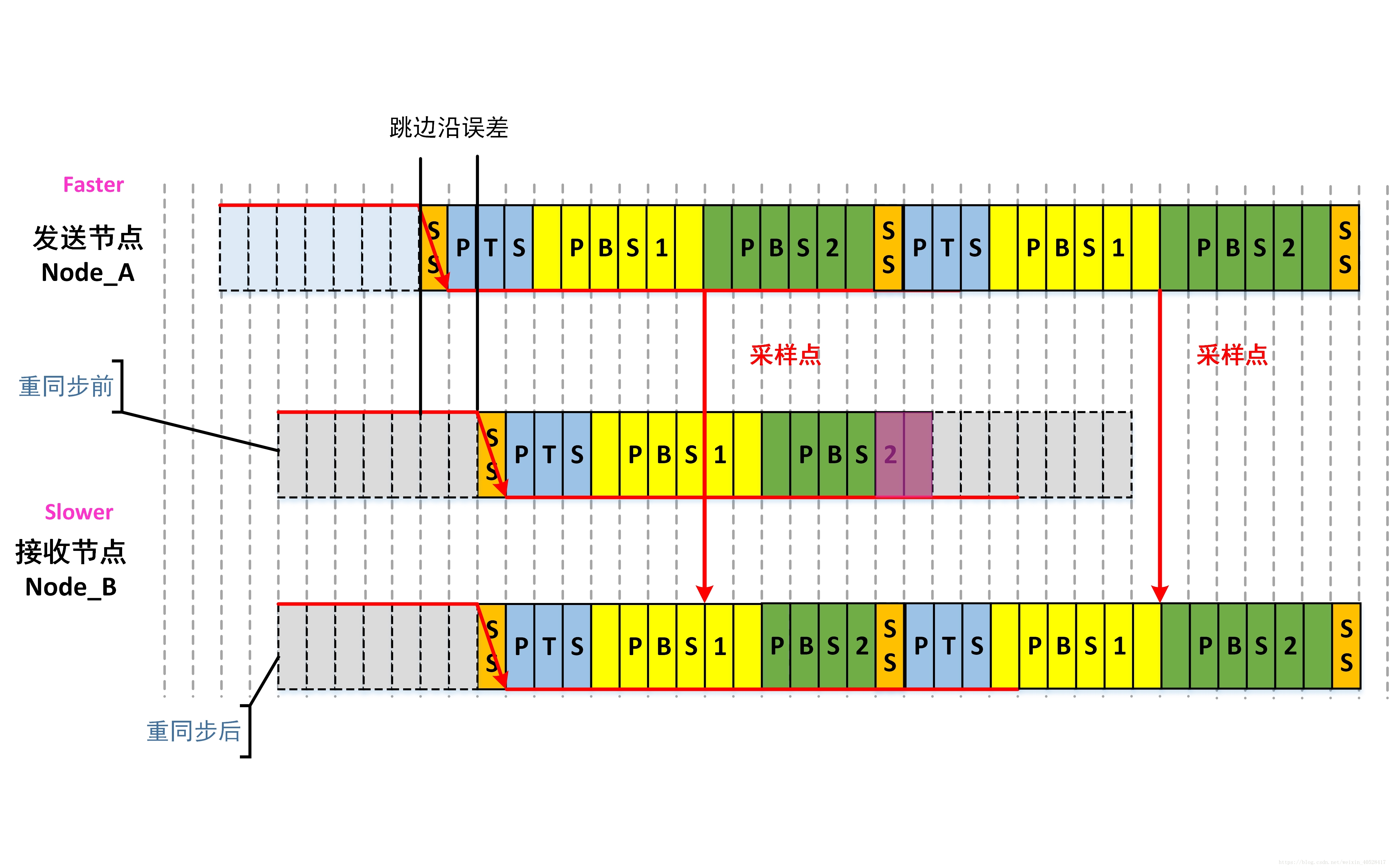
2.3 重同步
重同步发生在一个报文SOF位之外的其它位场内,当接收节点Node_B当前位的下降沿落在了发送节点Node_A当前位的同步段之外时发生重同步。
重同步会导致相位缓冲段1的延长或者相位缓冲段2的缩短,从而保证采样点的准确。
2.3.1 PBS1延长
发的晚(慢),收的早(块),导致PBS1延长。
如上图所示:
(1)发送节点Node_A比接收节点Node_B的时间慢了,也就是说Node_A当前位的ss段产生的时候,Node_B 当前位的ss段已经在2个Tq之前产生了;
(2)所以这个时候接收节点Node_B就将PBS1延长2个Tq的时间;
(3)于是这个时候Node_A当前位的采样点就和Node_B的采样点同步了。
2.3.2 PBS2缩短
发的早(快),收的晚(慢),导致PBS2缩短。
如上图所示:
(1)发送节点Node_A当前位的SS段诞生2Tq时长之后,接收节点Node_B的当前位才产生SS段;
(2)于是,接收节点Node_B当前位的PBS2段缩短,
(3)这样就会导致接收节点Node_B的下一位能够提前2个Tq,从而Node_B的下一位采样点和Node_A下一位的采样点能够同步。
2.3.3 同步跳转宽度
在重同步时,有个同步跳转宽度(SJW,Synchro Jump Width)的概念,表示的是PBS1和PBS2重同步时允许跳转的最大宽度。
同步跳转宽度必须满足以下几个条件:
- SJW必须小于PBS1和PBS2的最小值
- SJW最大值不能超过4
3 位定时参数的确定
位定时的参数主要涉及以下几个:
(1)位速率:单位为bps、Kbps、Mbps
(2)位时间:tBit,单位一般为纳秒(ns)
(3)时间量子Tq:
NBT 表示的是一个位时间tBit内包含Tq的个数。
(4)传输延迟时间tPTS
CAN报文在CAN总线上的传输时,物理延迟包含两个部分:
- 在CAN-BUS上传输造成的延迟
- 在节点上传输造成延迟
按照CAN通信协议的规定,补偿给传播延迟的时间长度要至少等于实际实际传播延迟时长的2被,即:
tPTS≥2×tdel=2×(tdel+tBus)tPTS≥2×tdel=2×(tdel+tBus)
需要注意的是:
Tips: 在CAN总线通信系统中是以时间量子Tq来度量时间的,所以如果延迟补偿时间tPTS = 3.1Tq,那么这个时候要取:tPTS = 4Tq。
(5)相位缓冲段
相位缓冲段的时间长度分为两种情况:
if (NBT-1-tPTS_Tq)/2==偶数
PBS1_Tq = PBS2_Tq = (NBT-1-tPTS_Tq)/2
else
PBS1_Tq = (NBT-1-tPTS_Tq)/2
PBS2_Tq = PBS1_Tq + 1
- 1
- 2
- 3
- 4
- 5
- 6
(6) 同步跳转宽度
(7) 验证晶振误差Df
CAN总线的晶振误差必须同时满足下面三个条件:
-
Df<=SJW(2×10×NBT)Df<=SJW(2×10×NBT)
-
Df<=min(PBS1_Tq,PBS2_Tq)2×(13×NBT−PBS2_Tq)Df<=min(PBS1_Tq,PBS2_Tq)2×(13×NBT−PBS2_Tq)
-
Df≤1.58%Df≤1.58%
4 例子
以下面的例子来讲述位定时参数的确定方法:
MCU晶振16MHz,位速率1Mbps,总线长度20m,单位总线延迟5ns/m,物理接口的发送接收延迟150ns
(1)晶振时钟周期:T=1s/16MHz = 62.5ns
(2)位时间 :tBit = 1/1Mbps = 1000ns
(3)BPR和NBT:考虑到 T = 125ns,tBit = 1000ns,所以BPR只能取值为1,才能满足NBT∈[8,25],于是预分频数BPR=1;
(4)CAN时钟周期Tq = 2 × 62.5 × 1 = 125ns
(5)NBT = 8
(6)传输延迟时间tPTS
所以
于是NBT=8个Tq的长度中需要有4个Tq用于补偿传播延迟,于是还剩下4个Tq,
SS同步段长度固定占据1个Tq,还剩3个Tq,于是PBS1分配一个Tq,PBS2分配2个Tq。
(7)同步跳转宽度
(8)晶振误差
-
Df<=SJW(2×10×NBT)=1(2×10×8)=0.00625Df<=SJW(2×10×NBT)=1(2×10×8)=0.00625
-
Df<=min(PBS1_Tq,PBS2_Tq)2×(13×NBT−PBS2_Tq)=12×(13×8−2)=0.00490


 浙公网安备 33010602011771号
浙公网安备 33010602011771号