
以MPU6050为例的硬件IIC的使用
参考调试MPU6050与EEPROM的经验,整合了目标内存/寄存器地址是否为16位的情况,合并了单字节与多字节间的操作,添加了返回值与读写超时功能:硬件IIC的7位从机地址查询方式读写参考代码 - JayWell - 博客园 (cnblogs.com)
很久以前听说过硬件IIC的“难用”,也在其他单片机上尝试过调试硬件IIC,调“通”过,却很容易卡死,于是默默给硬件IIC贴上个“不稳定”的标签,之后就一直用软件模拟IIC。
CH582这块单片机主攻蓝牙相关的功能,也有硬件IIC这个模块。考虑到低功耗蓝牙对时间的把控比较严格,相比软件IIC,硬件IIC能够帮助节省模拟时序代码中“无意义”的等待,且时序更精准,能达到更高的通信速率,更契合在蓝牙方面的应用,再加上有中断功能,还是有不错的应用价值的。
以下代码以MPU6050外设为例,简单验证了三个方向的加速度读取数值——转动MPU6050,各方向读取的数据有相应变化。
先贴一波MPU6050寄存器相关的宏定义:
#define SMPLRT_DIV 0x19 //陀螺仪采样率典型值为0x07 1000/(1+7)=125HZ #define CONFIG 0x1A //低通滤波器 典型值0x06 5hz #define GYRO_CONFIG 0x1B //陀螺仪测量范围 0x18正负2000度 #define ACCEL_CONFIG 0x1C //加速度计测量范围 0x18正负16g #define ACCEL_CONFIG2 0x1D //加速度计低通滤波器 0x06 5hz #define USER_CTRL 0x6A //用户配置当为0x10时使用SPI模式 #define PWR_MGMT_1 0x6B //电源管理1典型值为0x00 #define PWR_MGMT_2 0x6C //电源管理2典型值为0x00 #define WHO_AM_I 0x75 //器件ID MPU6050默认返回值为0x68 #define I2C_ADDR_MPU6050 0xD0 //左移一位后的地址 //0x68 //没有左移一位的7位地址 #define ACCEL_XOUT_H 0x3B //加速度计输出数据 #define ACCEL_XOUT_L 0x3C #define ACCEL_YOUT_H 0x3D #define ACCEL_YOUT_L 0x3E #define ACCEL_ZOUT_H 0x3F #define ACCEL_ZOUT_L 0x40 #define TEMP_OUT_H 0x41 //温度计输出数据 #define TEMP_OUT_L 0x42 #define GYRO_XOUT_H 0x43 //陀螺仪输出数据 #define GYRO_XOUT_L 0x44 #define GYRO_YOUT_H 0x45 #define GYRO_YOUT_L 0x46 #define GYRO_ZOUT_H 0x47 #define GYRO_ZOUT_L 0x48
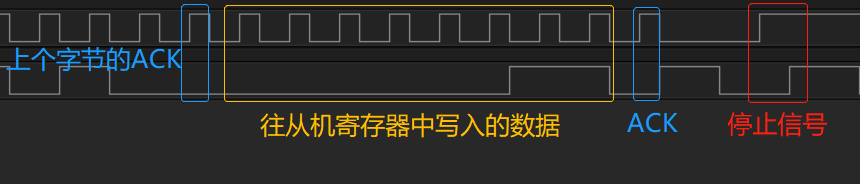
硬件IIC的“难用”,一部分归“功”于标志位之多——保证了其可靠性,可也限制了其稳健性,错过一个ACK就有可能导致卡死,导致下次判忙一直为Busy等问题。以下贴出相关标志位,具体描述详见CH58x系列手册和EVT包中的IIC接口使用指南。
/*各标志位 * AF: 应答失败 * BUSY: 总线忙标志位,该位在检测到一个停止位时会被清零 * MSL: 主从模式指示位,当接口处于主模式时(SB=1),硬件将该位置位 * SB: 起始位发送标志位,读取状态寄存器 1 后写数据寄存器的操作将清除该位 * ADDR: 地址被发送/地址匹配标志位,用户读取状态寄存器 1后,对状态寄存器 2的读操作将会清除此位 * TxE: 数据寄存器为空标志位,向数据寄存器写数据可以清除,或者产生一个起始或者停止位后由硬件自动清除。TxE=0表示非空 * TRA: 发送 /接收标志位 ,在检测到停止事件(STOPF=1),重复的起始条件时由硬件清零。该位根据地址字节的 R/W位来决定 * BTF: 字节发送结束标志位,用户读取状态寄存器 1后,对数据寄存器的读写将清除此位;在传输中,发起一个起始或者停止事件后,由硬件清除次位 */
IIC的读写时序和协议特性这里就不再介绍了,网上能找到很多资料。
和单片机上地其他硬件资源一样,使用前记得先初始化。我使用的MPU6050模块上有时钟线和数据线的上拉电阻,自己制板或是焊接,一定要在这两根信号线上加上拉。
GPIOB_ModeCfg(GPIO_Pin_12 | GPIO_Pin_13, GPIO_ModeIN_PU); //PB12:SDA,PB13:SCL 内部上拉较弱,可能需要外部上拉 I2C_Init(I2C_Mode_I2C, 400000, I2C_DutyCycle_16_9, I2C_Ack_Enable, I2C_AckAddr_7bit, Host_No_Addr);
//选择IIC模式,400k速率,选择占空比,默认开启ACK(接收模式必须开启),作从机时使用地址位数为7位,作从机时的地址(本测试中单片机为主机模式,后面两个参数不起作用)
习惯性地,我在使用MPU6050之前会“问一问它是谁”(只连一个MPU6050的话,不识别设备ID也行,直接初始化)。MPU6050模块上一般有个AD0引脚或焊盘,悬空或者接地,读WHO_AM_I寄存器,会返回0x68;接上高电平,会返回0x69,此时I2C_ADDR_MPU6050这个宏也就不要设为0x68左移1位了,也要改为0x69左移一位。
temp_data = IIC_read_reg(I2C_ADDR_MPU6050, (WHO_AM_I | 0x80)); //获取器件ID PRINT("0x%2x\n", temp_data);
这就需要读寄存器的代码,下面是返回一个字节的读代码↓
//从从机的某寄存器,读取一个字节的数据 uint8_t IIC_read_reg(uint8_t addr, uint8_t reg) { uint8_t data = 0; //主机通知从机要读取它的哪个寄存器 while(I2C_GetFlagStatus(I2C_FLAG_BUSY)); //IIC主机判忙 I2C_GenerateSTART(ENABLE); //起始信号 while(!I2C_CheckEvent(I2C_EVENT_MASTER_MODE_SELECT)); //判断BUSY, MSL and SB flags I2C_Send7bitAddress(addr, I2C_Direction_Transmitter); //发送地址+最低位0表示为“写” while(!I2C_CheckEvent(I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)); //判断BUSY, MSL, ADDR, TXE and TRA flags I2C_SendData(reg); //发送寄存器的地址 while(!I2C_CheckEvent(I2C_EVENT_MASTER_BYTE_TRANSMITTED)); //判断TRA, BUSY, MSL, TXE and BTF flags //直接产生一个重起始信号即可开始读的过程 I2C_GenerateSTART(ENABLE); //重起始信号 while(!I2C_CheckEvent(I2C_EVENT_MASTER_MODE_SELECT)); //判断BUSY, MSL and SB flags I2C_Send7bitAddress(addr, I2C_Direction_Receiver); //发送地址+最低位1表示为“读” while(!I2C_CheckEvent(I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED)); //判断BUSY, MSL and ADDR flags I2C_GenerateSTOP(DISABLE); //关闭停止信号使能 I2C_AcknowledgeConfig(DISABLE); //关闭ACK使能,接收一个字节数据后,主机就回NACK表示不再接收数据 while(!I2C_GetFlagStatus(I2C_FLAG_RXNE)); //获取RxEN的状态,等待收到数据 data = I2C_ReceiveData(); //获得从机的寄存器中的数据 I2C_GenerateSTOP(ENABLE); //停止信号 I2C_AcknowledgeConfig(ENABLE); //传输完毕,再次打开ACK使能 return data; }




在识别了设备ID之后,就可以对其进行初始化。
void MPU6050Init() { IIC_write_reg(I2C_ADDR_MPU6050, USER_CTRL, 0x00); //配置为0x10时为SPI通信模式 IIC_write_reg(I2C_ADDR_MPU6050, PWR_MGMT_1, 0x00); //解除休眠状态 IIC_write_reg(I2C_ADDR_MPU6050, SMPLRT_DIV, 0x02); //333HZ采样率 IIC_write_reg(I2C_ADDR_MPU6050, CONFIG, 0x03); //设置低通滤波,频率见手册 1K/ 1+2 = 333HZ IIC_write_reg(I2C_ADDR_MPU6050, GYRO_CONFIG, 0x18); //角速度计2000°/s量程 IIC_write_reg(I2C_ADDR_MPU6050, ACCEL_CONFIG, 0x10); //加速度计8g量程 }
这又需要写寄存器的代码↓
//向从机的某寄存器,写入一个字节的数据 void IIC_write_reg(uint8_t addr, uint8_t reg, uint8_t data) { //主机通知从机要写它的哪个寄存器 while(I2C_GetFlagStatus(I2C_FLAG_BUSY)); //IIC主机判忙 I2C_GenerateSTART(ENABLE); //起始信号 while(!I2C_CheckEvent(I2C_EVENT_MASTER_MODE_SELECT)); //判断BUSY, MSL and SB flags I2C_Send7bitAddress(addr, I2C_Direction_Transmitter); //发送地址+最低位0表示为“写” while(!I2C_CheckEvent(I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)); //判断BUSY, MSL, ADDR, TXE and TRA flags I2C_SendData(reg); //发送寄存器的地址 //ACK之后直接写入数据 while(!I2C_GetFlagStatus(I2C_FLAG_TXE)); //获取TxE的状态 数据寄存器为空标志位,可以向其中写数据 I2C_SendData(data); //发送寄存器的地址 while(!I2C_CheckEvent(I2C_EVENT_MASTER_BYTE_TRANSMITTED)); //判断TRA, BUSY, MSL, TXE and BTF flags I2C_GenerateSTOP(ENABLE); //停止信号 }



至此,就可以读取传感器相应的寄存器的数值了。MPU6050返回的主要数值大多是16位的数据,使用以下函数一次读两个字节数据↓(一个字节一个字节读也行,慢点罢了)
//从从机的某寄存器起始,读取并返回16位数据 uint16_t IIC_read_reg_2Bytes(uint8_t addr, uint8_t reg) { uint8_t dataH = 0, dataL = 0; uint16_t data = 0; //主机通知从机要读取它的哪个寄存器 while(I2C_GetFlagStatus(I2C_FLAG_BUSY)); //IIC主机判忙 I2C_GenerateSTART(ENABLE); //起始信号 while(!I2C_CheckEvent(I2C_EVENT_MASTER_MODE_SELECT)); //判断BUSY, MSL and SB flags I2C_Send7bitAddress(addr, I2C_Direction_Transmitter); //发送地址+最低位0表示为“写” while(!I2C_CheckEvent(I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)); //判断BUSY, MSL, ADDR, TXE and TRA flags I2C_SendData(reg); //发送寄存器的地址 while(!I2C_CheckEvent(I2C_EVENT_MASTER_BYTE_TRANSMITTED)); //判断TRA, BUSY, MSL, TXE and BTF flags //直接产生一个重起始信号即可开始读的过程 I2C_GenerateSTART(ENABLE); //重起始信号 while(!I2C_CheckEvent(I2C_EVENT_MASTER_MODE_SELECT)); //判断BUSY, MSL and SB flags I2C_Send7bitAddress(addr, I2C_Direction_Receiver); //发送地址+最低位1表示为“读” while(!I2C_CheckEvent(I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED)); //判断BUSY, MSL and ADDR flags I2C_GenerateSTOP(DISABLE); //关闭停止信号使能 while(!I2C_GetFlagStatus(I2C_FLAG_RXNE)); //获取RxEN的状态,等待收到数据 dataH = I2C_ReceiveData(); //获得从机的寄存器中的数据 I2C_AcknowledgeConfig(DISABLE); //清除ACK位 主设备为了能在收到最后一个字节后产生一个NACK脉冲, //必须在读取倒数第二个字节之后(倒数第二个RxNE 事件之后)清除ACK位(ACK=0) while(!I2C_GetFlagStatus(I2C_FLAG_RXNE)); //获取RxEN的状态 dataL = I2C_ReceiveData(); //获得从机地址的寄存器地址中的数据 I2C_GenerateSTOP(ENABLE); //使能停止信号 I2C_AcknowledgeConfig(ENABLE); //传输完毕,再次打开ACK使能 data = (uint16_t)(dataH<<8) + dataL; return data; }






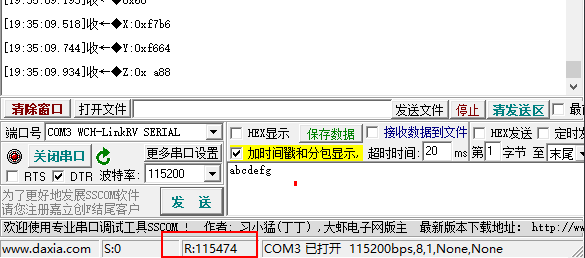
为了验证代码运行的稳定性,加上随机延时,将下列代码跑了一个下午,也没有卡死(在上面的函数中我一直用while(判断标志)的死循环来等待,一旦标志位不对就会卡死),动一动传感器有相应的数据变化,就算成功了。
while(1) { DelayMs(100+rand()%300); temp_data = IIC_read_reg(I2C_ADDR_MPU6050, (WHO_AM_I | 0x80)); //获取器件ID PRINT("0x%2x\n", temp_data); DelayMs(100+rand()%300); MPU6050Init(); DelayMs(50+rand()%300); mpu_acc_x = IIC_read_reg_2Bytes(I2C_ADDR_MPU6050, ACCEL_XOUT_H); //获取X轴的加速度 PRINT("X:0x%4x\n",mpu_acc_x); DelayMs(50+rand()%300); mpu_acc_y = IIC_read_reg_2Bytes(I2C_ADDR_MPU6050, ACCEL_YOUT_H); //获取Y轴的加速度 PRINT("Y:0x%4x\n",mpu_acc_y); DelayMs(50+rand()%300); mpu_acc_z = IIC_read_reg_2Bytes(I2C_ADDR_MPU6050, ACCEL_ZOUT_H); //获取Z轴的加速度 PRINT("Z:0x%4x\n",mpu_acc_z); }
IIC通信协议中是可以连续读/写n个字节的数据的,手头的这块MPU6050也支持这样的操作,代码如下↓
//从从机的某寄存器起始,连续读取n个字节的数据 void IIC_read_reg_nBytes(uint8_t addr, uint8_t reg, uint8_t *des, uint8_t len) { //主机通知从机要读取它的哪个寄存器 while(I2C_GetFlagStatus(I2C_FLAG_BUSY)); //IIC主机判忙 I2C_GenerateSTART(ENABLE); //起始信号 while(!I2C_CheckEvent(I2C_EVENT_MASTER_MODE_SELECT)); //判断BUSY, MSL and SB flags I2C_Send7bitAddress(addr, I2C_Direction_Transmitter); //发送地址+最低位0表示为“写” while(!I2C_CheckEvent(I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)); //判断BUSY, MSL, ADDR, TXE and TRA flags I2C_SendData(reg); //发送寄存器的地址 while(!I2C_CheckEvent(I2C_EVENT_MASTER_BYTE_TRANSMITTED)); //判断TRA, BUSY, MSL, TXE and BTF flags //直接产生一个重起始信号即可开始读的过程 I2C_GenerateSTART(ENABLE); //重起始信号 while(!I2C_CheckEvent(I2C_EVENT_MASTER_MODE_SELECT)); //判断BUSY, MSL and SB flags I2C_Send7bitAddress(addr, I2C_Direction_Receiver); //发送地址+最低位1表示为“读” while(!I2C_CheckEvent(I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED)); //判断BUSY, MSL and ADDR flags I2C_GenerateSTOP(DISABLE); //关闭停止信号使能 for(uint8_t i=0; i<len; i++) { if(i == len-1) I2C_AcknowledgeConfig(DISABLE); //清除ACK位 主设备为了能在收到最后一个字节后产生一个NACK脉冲, //必须在读取倒数第二个字节之后(倒数第二个RxNE 事件之后)清除ACK位(ACK=0) while(!I2C_GetFlagStatus(I2C_FLAG_RXNE)); //获取RxEN的状态,等待收到数据 *(des+i) = I2C_ReceiveData(); //获得从机的寄存器中的数据 } I2C_GenerateSTOP(ENABLE); //使能停止信号 I2C_AcknowledgeConfig(ENABLE); //传输完毕,再次打开ACK使能 }
//向从机某寄存器起始,连续写入n个字节的数据 void IIC_write_reg_nBytes(uint8_t addr, uint8_t reg, uint8_t *src, uint8_t len) { //主机通知从机要写它的哪个寄存器 while(I2C_GetFlagStatus(I2C_FLAG_BUSY)); //IIC主机判忙 I2C_GenerateSTART(ENABLE); //起始信号 while(!I2C_CheckEvent(I2C_EVENT_MASTER_MODE_SELECT)); //判断BUSY, MSL and SB flags I2C_Send7bitAddress(addr, I2C_Direction_Transmitter); //发送地址+最低位0表示为“写” while(!I2C_CheckEvent(I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)); //判断BUSY, MSL, ADDR, TXE and TRA flags I2C_SendData(reg); //发送寄存器的地址 //ACK之后直接写入数据 for(uint8_t i=0; i<len; i++) { while(!I2C_GetFlagStatus(I2C_FLAG_TXE)); //获取TxE的状态 数据寄存器为空标志位,可以向其中写数据 I2C_SendData(*(src+i)); //发送寄存器的地址 } while(!I2C_CheckEvent(I2C_EVENT_MASTER_BYTE_TRANSMITTED)); //判断TRA, BUSY, MSL, TXE and BTF flags I2C_GenerateSTOP(ENABLE); //停止信号 }


使用连续读/写的代码后,初始化和读传感器数值,就变成下面这个样子↓
void MPU6050Init() { uint8_t temp_str1[2] = {0}; IIC_write_reg_nBytes(I2C_ADDR_MPU6050, USER_CTRL, temp_str1, 2); uint8_t temp_str2[4] = {0x02, 0x03, 0x18, 0x10}; IIC_write_reg_nBytes(I2C_ADDR_MPU6050, SMPLRT_DIV, temp_str2, 4); }
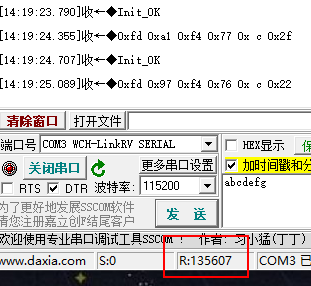
while(1) { DelayMs(300+rand()%300); MPU6050Init(); PRINT("Init_OK\n"); DelayMs(300+rand()%300); IIC_read_reg_nBytes(I2C_ADDR_MPU6050, ACCEL_XOUT_H,acc_str,6); for(uint8_t i=0; i<6; i++) PRINT("0x%2x ",acc_str[i]); PRINT("\n"); }
又挂着跑了三个多小时,也没有出现卡死的情况,传感器数据变化正常。
回过头来看,使用硬件IIC去写数据,没有磕绊,但在读数据时,要注意两点:
①在读最后一个字节的数据前关闭ACK使能,即使是只读一个数据,也要在读取前关闭。我的理解是ACK使能后,主机会自动拉低数据线以回复ACK,若没有及时关闭,最好的情况是多收一个字节数据,通信照常进行,最坏的情况就是卡死了。
②在读数据之前关闭STOP使能。很奇怪,在读之前关闭停止信号使能,在读完数据之后再使能,产生一个停止信号,可以“增强”程序的稳定性;若缺少关闭使能的代码,程序会在读取或多或少的传感器数值后卡死。解释或猜测还需要笔者继续深入了解硬件IIC。
另外,如果想加强代码的健壮性,可以在读/写函数的判断标志等待中加上计数来判断等待超时,超时则直接返回错误代码,根据错误代码选择重新读写或是重新初始化硬件IIC模块或外设。比如说↓
//向从机的某寄存器写入一个字节的数据 uint8_t IIC_write_reg(uint8_t addr, uint8_t reg, uint8_t data) { uint16_t i=1000; //主机通知从机要写它的哪个寄存器 while(I2C_GetFlagStatus(I2C_FLAG_BUSY) && i--) //IIC主机判忙 { if(!i) return 1; } i = 1000; I2C_GenerateSTART(ENABLE); //起始信号 while(!I2C_CheckEvent(I2C_EVENT_MASTER_MODE_SELECT) && i--) //判断BUSY, MSL and SB flags { if(!i) return 2; } i = 1000; I2C_Send7bitAddress(addr, I2C_Direction_Transmitter); //发送地址+最低位0表示为“写” //略 }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号