菜鸡数据结构
数据结构复习
一个月学完数据结构,写一篇究极总结,当复习了
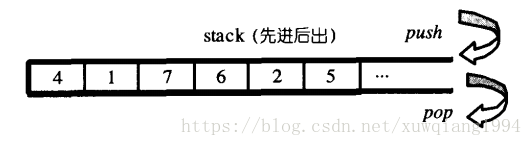
栈(Stack)
回归原始,可以用链表实现栈,或者说所有的数据结构都可以用链表实现。STL中用stack容器实现栈。栈的特征就是先进后出,First In Last Out。
template <class T, class Container = deque
> class stack;
T就是栈所存的元素类型,container是容器适配器,不写第二个参数的情况下默认是deque,你也可以自己把它换成vector,具体搜索容器适配器,这里不多赘述。
需要注意的一点是,stack没有迭代器,不允许遍历,只能在栈顶进行push、top、pop操作。
常用函数
size()返回栈内元素数量,类型是unsigned integral。
empty()用于判断栈内有无元素(stack.size() == 0),是否为空,返回bool值。
top()用于返回栈顶元素的引用。
push(value_type)和emplace(arg...)都是在栈顶插入元素,区别在于push是直接插入对象,在传参数的时候是一个对象。而emplace可以跟push一样,直接插入对象,也可以直接传入构造对象需要的元素,然后自己调用其构造函数。这么说应该说不明白,举个例子:
我有一个类
class Data {
private:
int a, b;
public:
Data(int x, int y) :a(x), b(y) {};
};
现在声明一个栈,类型是Data
stack<Data> nums;
下面分别用push和emplace插入元素
nums.push(Data(1, 2)); //先调用Data的构造函数,创建出对象之后再压入栈顶,参数是个右值
nums.emplace(Data(1, 2)); //同上
nums.emplace(1, 2); //先调用Data的构造函数,传进去的参数用于Data的构造函数,把对象建好之后再压入栈
可以看出来emplace拥有push一样的功能,但是它还能调用对象的构造函数,十分强大。
pop();用于删除栈顶元素,没有返回值。
swap(stack2)用于将一个堆栈的内容与另一个相同类型的堆栈交换,但是大小可能会有所不同,没有返回值。
队(Queue)
STL中使用queue容器实现栈。跟栈不一样,队是先进先出,First In First Out。
template <class T, class Container = deque
> class queue;
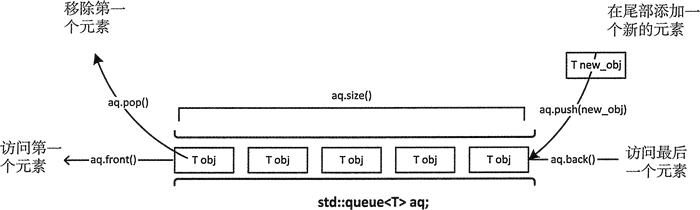
跟stack一样,T是容器的类型,container是适配器,默认deque。queue同样没有迭代器,只能通过一些函数在队首、队尾操作。
STL的queue就不说了,用起来跟stack差不多,一些api百度一下就好了。
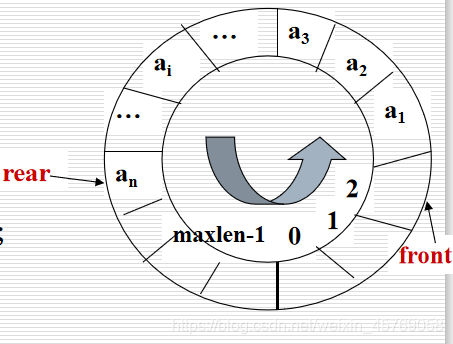
循环队列
跟栈不一样的是,队还有一个问题:循环队列。想像一下,一条蛇围成一个圆,嘴巴咬着尾巴,这个就是循环队列的样子。
下面写一下循环队列:
#pragma once
template <class T>
class CircularQueue {
int rear, front;
int maxSize;
T* queue;
bool Full() const;
public:
CircularQueue();
CircularQueue(int size);
~CircularQueue();
bool Push(const T& data);
T Top() const;
T Bottom() const;
bool Empty() const;
bool Pop();
void Clear();
int Size() const;
};
template<class T>
bool CircularQueue<T>::Full() const {
return ((rear + 1) % maxSize == front) ? true : false;
}
template<class T>
CircularQueue<T>::CircularQueue() {
front = rear = 0;
maxSize = 10;
queue = new T[maxSize];
}
template <class T>
CircularQueue<T>::CircularQueue(int size) :front(0), rear(0), maxSize(size + 1) {
queue = new T[maxSize];
}
template<class T>
CircularQueue<T>::~CircularQueue() {
delete[] queue;
}
template <class T>
bool CircularQueue<T>::Push(const T& data) {
if (Full()) {
return false;
}
queue[rear] = data;
rear = (rear + 1) % maxSize;
return true;
}
template<class T>
T CircularQueue<T>::Top() const {
if (Empty()) {
return T();
}
return queue[front];
}
template<class T>
T CircularQueue<T>::Bottom() const {
if (Empty()) {
return T();
}
return queue[rear];
}
template<class T>
bool CircularQueue<T>::Empty() const {
return(front == rear) ? true : false;
}
template<class T>
bool CircularQueue<T>::Pop() {
if (Empty()) {
return false;
}
front = (front + 1) % (maxSize);
return true;
}
template<class T>
void CircularQueue<T>::Clear() {
front = rear = 0;
}
template<class T>
int CircularQueue<T>::Size() const {
return (rear - front + maxSize) % maxSize;
}
把大致功能都实现了一遍,代码有参考。总结一下循环队列的关键点:
- 循环列表最关键的是处理队头队尾指针,不能一直加一直减,所以就用到了求余的方法
- 判断是否为空:front == rear
- 判断是否已满:(rear + 1) % maxSize == front
- 求元素个数:(rear - front + maxSize) % maxSize
哈希表(Hash Table)
哈希表又叫散列表,它储存数据是通过键值对进行的。关于键值对,可以想象你在逛商场买衣服,每一件衣服上都挂着一个吊牌,你每次都是拿吊牌,然后吊牌的绳子把衣服拉起来,吊牌就是键,衣服就是值。但是哈希表最大的不同在于,它的键是经过处理的:哈希表的键通过散列函数映射到某一集合,比如f(key)=a*key+b,通过散列函数映射之后得到的键就不是原来的键了。根据哈希表的种种特征,很容易看出来哈希表里面没有重复的键,但是一个键可以对应多个值,具体看你怎么使用了。
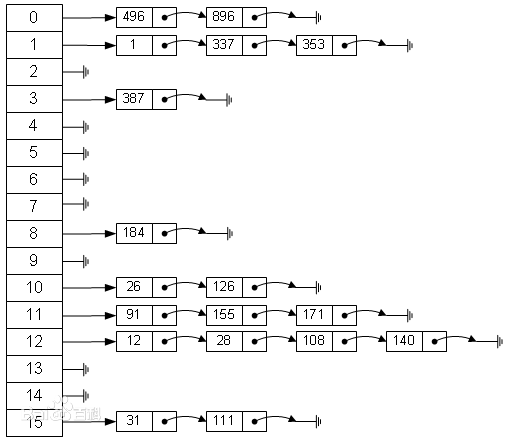
你可能会问这样做有什么用,试想一些键非常大,或者很分散,你存起来会消耗很多内存,耗时也久。但是经过散列函数映射到一个范围里面,就能加快效率,减少开销。但是哈希表这么好用,自然也会有缺陷的:万一经过散列函数之后,某一些键映射到同一个地方怎么办?这就是哈希冲突。
解决的办法也有很多,开放寻址法(线性探测法、平方探测法)、链地址法、再散列法等。
稍微写一下简单的哈希表:
#define MAXTABLESIZE 10000
#define KEYLENGTH 100
struct LNode {
int data;
LNode* next;
LNode() :data(0), next(nullptr) {};
};
struct HashTable {
int tablesize;
LNode* heads;
HashTable() :tablesize(0), heads(nullptr) {};
};
/// <summary>
/// 返回大于n且不超过MAXTABLESIZE的最小质数
/// </summary>
/// <param name="n">起始值</param>
/// <returns>质数</returns>
int NextPrime(int n) {
int p = (n % 2) ? n + 2 : n + 1;
int i = 0;
while (p <= MAXTABLESIZE) {
for (i = (int)sqrt(p); i > 2; i--) {
if ((p % i) == 0) {
break;
}
}
if (i == 2) {
break;
}
else {
p += 2;
}
}
return p;
}
/// <summary>
/// 创建哈希表
/// </summary>
/// <param name="table_size">表长度</param>
/// <returns>表头指针</returns>
HashTable* CreateTable(int table_size) {
HashTable* h = (HashTable*)malloc(sizeof(HashTable));
h->tablesize = NextPrime(table_size);
h->heads = (LNode*)malloc(h->tablesize * sizeof(LNode));
for (int i = 0; i < h->tablesize; i++) {
h->heads[i].next = nullptr;
}
return h;
}
/// <summary>
/// 散列函数
/// </summary>
/// <param name="key">键</param>
/// <param name="n">链表长度</param>
/// <returns>键值</returns>
int Hash(int key, int n) {
return key % n;
}
/// <summary>
/// 查找元素
/// </summary>
/// <param name="h">表头指针</param>
/// <param name="key">要找的键</param>
/// <returns>找到元素的指针</returns>
LNode* Find(HashTable* h, int key) {
int pos = Hash(key, h->tablesize);
LNode* p = h->heads[pos].next;
while (p && key != p->data) {
p = p->next;
}
return p;
}
/// <summary>
/// 插入新元素
/// </summary>
/// <param name="h">表头</param>
/// <param name="key">插入的键</param>
/// <returns>是否完成</returns>
bool Insert(HashTable* h, int key) {
LNode* p = Find(h, key);
if (!p) {
LNode* newNode = (LNode*)malloc(sizeof(LNode));
newNode->data = key;
int pos = Hash(key, h->tablesize);
newNode->next = h->heads[pos].next;
h->heads[pos].next = newNode;
return true;
}
else {
return false;
}
}
/// <summary>
/// 移除元素
/// </summary>
/// <param name="h">表头</param>
/// <param name="key">要删除的键</param>
/// <returns>是否完成</returns>
bool Remove(HashTable* h, int key) {
LNode* p0 = Find(h, key);
if (p0) {
int pos = Hash(key, h->tablesize);
LNode* p = h->heads[pos].next;
if (p == p0) {
h->heads[pos].next = p->next;
p->next = nullptr;
free(p);
return true;
}
while (p && p->next != p0) {
p = p->next;
}
p->next = p0->next;
p0->next = nullptr;
free(p0);
return true;
}
else {
return false;
}
}
/// <summary>
/// 销毁链表
/// </summary>
/// <param name="h">表头元素</param>
void DestroyTable(HashTable* h) {
LNode* p, * temp;
for (int i = 0; i < h->tablesize; i++) {
p = h->heads[i].next;
while (p) {
temp = p->next;
free(p);
p = temp;
}
}
free(h->heads);
free(h);
}
代码有参考。上面就实现了一个基于链表的哈希表,解决哈希冲突的方法是线性探测,直接加一。
STL中使用unordered_map实现哈希表。
template <class Key, class T, class Hash = hash
, class Pred = equal_to , class Alloc = allocator<pair<const Key, T>>> class unordered_map;
关于hash_map与unordered_map:
由于在C++标准库中没有定义散列表hash_map,标准库的不同实现者将提供一个通常名为hash_map的非标准散列表。因为这些实现不是遵循标准编写的,所以它们在功能和性能保证上都有微妙的差别。
从C++11开始,哈希表实现已添加到C++标准库标准。决定对类使用备用名称,以防止与这些非标准实现的冲突,并防止在其代码中有hash_table的开发人员无意中使用新类。
所选择的备用名称是unordered_map,它更具描述性,因为它暗示了类的映射接口和其元素的无序性质。
Key就是键的类型,T就是值的类型,Hash就是散列函数,Pred是一个二元谓词,用来判断键是否已经存在的,Alloc是分配器。散列函数、谓词和分配器都用默认的就好,我们一般只用定义键和值的类型。需要强调的是哈希表是无序容器,迭代器之间不能用大于小于号比较,可以与队和栈做对比。
一些api也是百度去看吧,做一道简单LeetCode示范一下:
class Solution {
public:
vector<int> twoSum(vector<int>& nums, int target) {
if (nums.size() < 2) {
return {};
}
unordered_map<int, int> hashtable;
for (int i = 0; i < nums.size(); i++) {
if (hashtable.find(nums[i]) != hashtable.end()) {
return { hashtable[nums[i]],i };
}
hashtable[target - nums[i]] = i;
}
return {};
}
};
哈希去重还是很好用的,看到题目说没有重复就多想想哈希。
二叉树(Binary Tree)
二叉树是一种非常重要的数据结构,许多实际问题抽象出来的数据结构都是二叉树,或者说是树。
不知道有没有发现,之前的栈、队、哈希表的数据元素前后关系都是一对一的,再看到二叉树,它是一对多的,如果继续往下学,图的数据结构是多对多的,所以二叉树开始就是非线性结构的数据结构了。
基本术语和性质
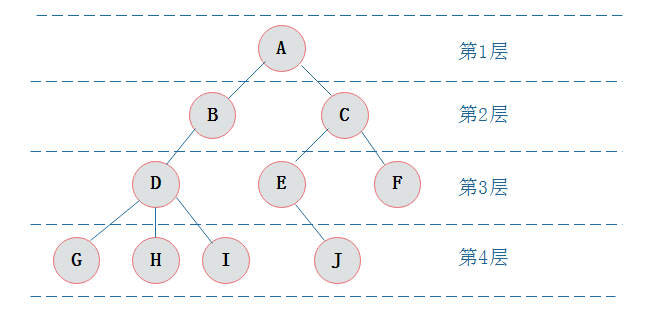
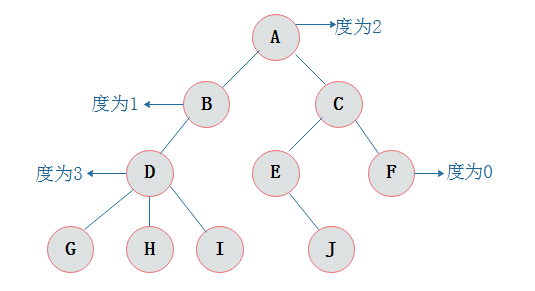
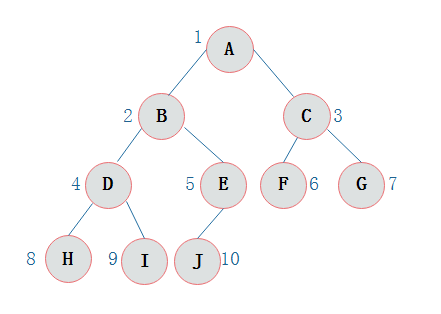
先介绍一下二叉树相关的术语:二叉树顶端称为根节点,二叉树的节点包含一个数据元素及指向其左、右子树的两个分支,分别成为左分支和右分支。节点的左、右子树的根称为该节点的左、右孩子,统称为孩子,该节点称为孩子的双亲。同一个孩子之间可互称为兄弟。节点的孩子个数称为节点的度,度为0的节点称为叶子节点,非叶子节点的结构称为内部结构或分支节点。节点的层次从根节点开始定义,根为第1层,根的孩子为第2层,如此类推。二叉树中节点的最大层次称为二叉树的深度或高度。一棵深度为k且有 2^k-1个节点的二叉树称为满二叉树。一棵深度为k的有n个结点的二叉树,对树中的结点按从上至下、从左到右的顺序进行编号,如果编号为i(1≤i≤n)的结点与满二叉树中编号为i的结点在二叉树中的位置相同,则这棵二叉树称为完全二叉树。
应该看晕了吧,下面上点图:
- 层的定义
- 度的定义
- 满二叉树的定义
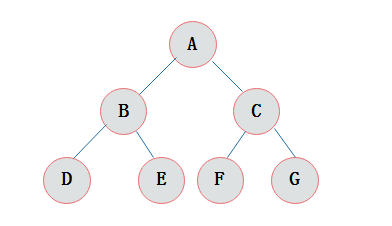
- 完全二叉树的定义
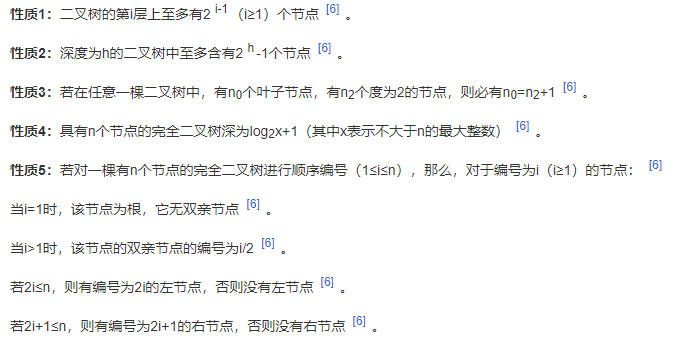
最后再补充一下二叉树的性质,这些性质对后面的使用会很有帮助:
存储与遍历
上面那些只不过是二叉树的术语,下面才是这个数据结构的使用。
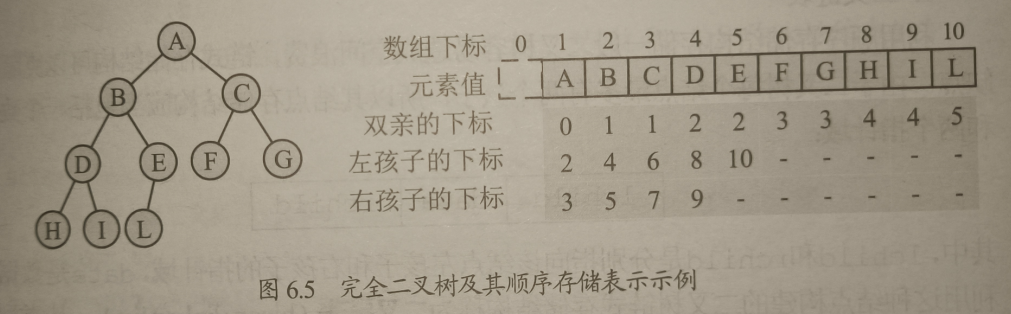
在存储二叉树时,除了存储它的每个节点数据以外,还要表示节点之间的一对多逻辑,也就是父子关系。根据二叉树的性质5,我们可以用一维数组去存储完全二叉树,每个节点的双亲和孩子都可以根据性质5计算得出。
但是一般的二叉树就不太方便用一维数组存了,因此我们可以定义自己的数据结构。
#pragma once
#include<iostream>
#include<queue>
template<typename T>
struct TreeNode {
T data;
TreeNode<T>* leftChild, * rightChild;
TreeNode() {}
TreeNode(T x) : data(x), leftChild(nullptr), rightChild(nullptr) {}
};
template<typename T>
class BinaryTree {
private:
TreeNode<T>* root;
void DeleteNode(TreeNode<T>* head);
void InsertNode(const T& x, TreeNode<T>*& head);
void Pre(TreeNode<T>* head) const; // 前序遍历
void In(TreeNode<T>* head) const; // 中序遍历
void Post(TreeNode<T>* head) const; // 后序遍历
public:
BinaryTree() :root(nullptr) {};
BinaryTree(const T& data);
~BinaryTree();
void Insert(const T& x);
void PreTraversal() const;
void InTraversal() const;
void PostTraversal() const;
};
template<typename T>
void BinaryTree<T>::DeleteNode(TreeNode<T>* head) {
if (head != nullptr) {
DeleteNode(head->leftChild);
DeleteNode(head->rightChild);
delete head;
}
}
template<typename T>
void BinaryTree<T>::InsertNode(const T& x, TreeNode<T>*& head) {
if (head == nullptr) {
head = new TreeNode<T>(x);
return;
}
std::queue<TreeNode<T>*> level;
TreeNode<T>* temp;
level.push(head);
while (!level.empty()) {
temp = level.front();
level.pop();
if (temp->leftChild) {
level.push(temp->leftChild);
}
else {
InsertNode(x, temp->leftChild);
break;
}
if (temp->rightChild) {
level.push(temp->rightChild);
}
else {
InsertNode(x, temp->rightChild);
break;
}
}
}
template<typename T>
void BinaryTree<T>::Pre(TreeNode<T>* head) const {
if (head != nullptr) {
std::cout << head->data << " ";
Pre(head->leftChild);
Pre(head->rightChild);
}
}
template<typename T>
void BinaryTree<T>::In(TreeNode<T>* head) const {
if (head != nullptr) {
In(head->leftChild);
std::cout << head->data << " ";
In(head->rightChild);
}
}
template<typename T>
void BinaryTree<T>::Post(TreeNode<T>* head) const {
if (head != nullptr) {
Post(head->leftChild);
Post(head->rightChild);
std::cout << head->data << " ";
}
}
template<typename T>
BinaryTree<T>::BinaryTree(const T& data) {
root = new TreeNode<T>(data);
}
template<typename T>
BinaryTree<T>::~BinaryTree() {
DeleteNode(root);
}
template<typename T>
void BinaryTree<T>::Insert(const T& x) {
InsertNode(x, root);
}
template<typename T>
void BinaryTree<T>::PreTraversal() const {
Pre(root);
}
template<typename T>
void BinaryTree<T>::InTraversal() const {
In(root);
}
template<typename T>
void BinaryTree<T>::PostTraversal() const {
Post(root);
}
上面是一个简单的二叉树。先定义一个struct,把一个结点该有的东西写进去,要注意的是,我的定义里面并没有包含指向父结点的指针,只有指向左右孩子的指针,这种是双叉链表。某些情况下可能需要频繁调用父结点的数据,这个时候你可以写一个包含指向父结点的指针的结构体,变成一个三叉链表。
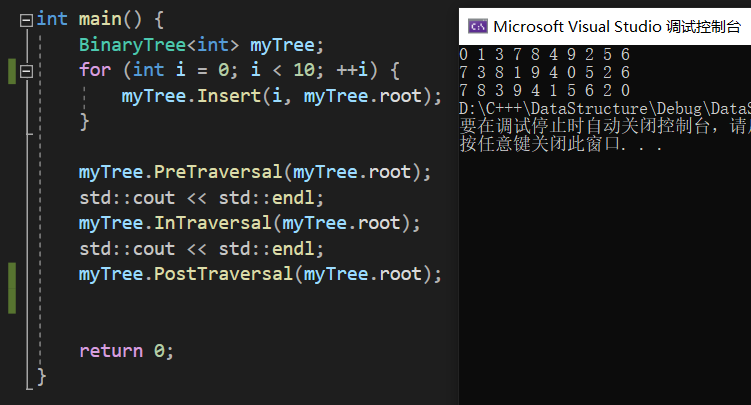
接下来就是一些常规的函数,插入啦、查找啦还有重要的三种遍历。 下面解释遍历的时候都会用这个二叉树做说明:
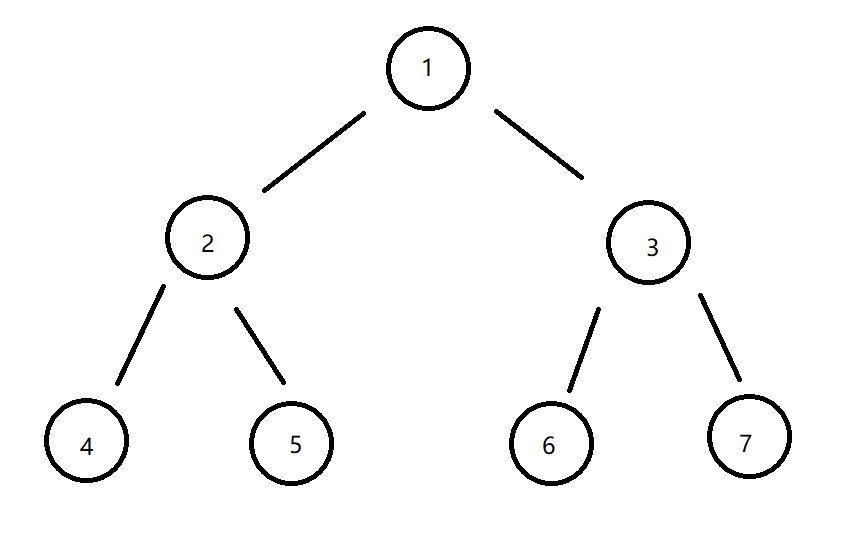
前序遍历是先访问根结点,再访问左子树,最后访问右子树。像上面这个二叉树,它最后会输出“1 2 4 5 3 6 7 ”,稍微看一下前序遍历的代码就看的出来。中序遍历则是先访问左子树,再访问根结点,最后访问右子树。同样是上面的二叉树,最后输出结果为“4 2 5 1 6 7 3 ”。后序遍历就是先访问左子树,再访问右子树,最后访问根结点,输出的结果为“4 5 2 6 7 3 1 ”。其实再认真看看三种遍历的算法,其实差别真的很小,就是cout放的位置不一样而已,但是这就意味着输出的时机不一样,三种遍历方法记起来也很容易。
其实除了这三种遍历,还有一种遍历叫做层次遍历,它是按二叉树的层次从小到大且每层从左到右的顺序一次访问结点,如果遍历上图的二叉树,输出的结果就是“1 2 3 4 5 6 7 ”。这种遍历我把它用在了插入的代码上,为了把二叉树插成完全二叉树,用层次遍历的方法按顺序插满。为了检验是否为完全二叉树,我们可以稍微测试一下:
很显然,跟上面说的结果一致,证明它确实是完全二叉树。
最后目光聚焦删除二叉树的代码,它其实就是用了后序遍历,不断的删除结点,最终把根结点删掉。关于遍历的应用还很多,留给读者自己摸索了。
堆(Heap)
堆是一类完全二叉树,它可以用于高效地实现排序、选择最大(小)值和优先队列。下面先聊一聊基本的定义和术语。
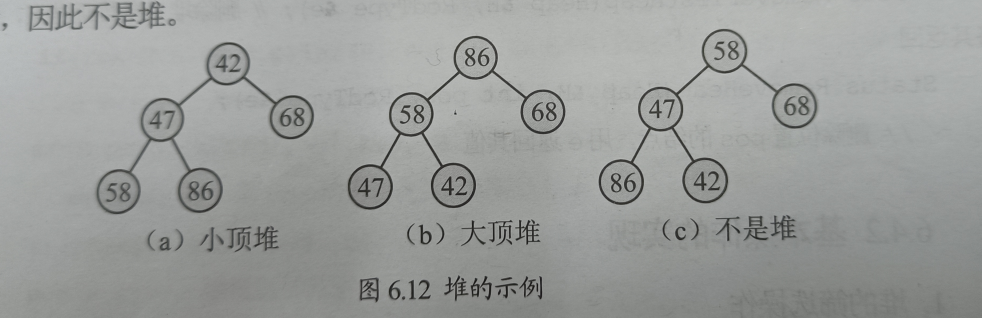
堆有两类,一类叫小顶堆(小根堆),一类叫大顶堆(大根堆)。若堆中所有非叶子结点均不大于其左右孩子结点,则称为小顶堆(小根堆)。大顶堆(大根堆)的定义可以读者自己推导一下。
堆中根结点的位置称为堆顶,最后结点的位置称为堆尾,结点的个数称之为堆长度。 堆很实用,因为它在每次添加或修改元素时,都可以自动调整自身的结构,使其重新成为一个大根堆或者小根堆。而且这个过程只要付出logN的代价(树的高度),在大样本的情况下优势非常大。
平时用堆的话一般就是用优先队列了,STL中有priority_queue容器去实现。
template <class T, class Container = vector
,
class Compare = less> class priority_queue;
第一个参数是数据的类型,第二个参数是实现优先队列底层容器的类型,默认是vector,第三个参数是比较数据的方法,这个比较方法一般是重载了operator()的类,实现两个数据的比较。less实现的是大根堆,greater实现的是小根堆。如果元素的类型不是基本类型,那第三个参数一般需要自己重写一个比较函数的,不然less和greater不知道怎么去比较。
普通的队列是一种先进先出的数据结构,元素在队列尾追加,而从队列头删除。在优先队列中,元素被赋予优先级。当访问元素时,具有最高优先级的元素最先删除。优先队列具有最高级先出 (First In Largest Out)的行为特征。
优先队列也是队,实现它的底层容器是vector,所以vector有的一些函数它都会有。
做一道LeetCode来介绍堆的优点:
class MedianFinder {
priority_queue<int, vector<int>, less<int>> queMin;
priority_queue<int, vector<int>, greater<int>> queMax;
public:
MedianFinder() {}
void addNum(int num) {
if (queMin.empty() || num <= queMin.top()) {
queMin.push(num);
if (queMax.size() + 1 < queMin.size()) {
queMax.push(queMin.top());
queMin.pop();
}
}
else {
queMax.push(num);
if (queMax.size() > queMin.size()) {
queMin.push(queMax.top());
queMax.pop();
}
}
}
double findMedian() {
if (queMin.size() > queMax.size()) {
return queMin.top();
}
return (queMin.top() + queMax.top()) / 2.0;
}
};
这道题的题解很有趣,建了一个大根堆和一个小根堆,相当于两个金字塔塔尖相碰,中间的那个数就是中位数。
二叉查找树(Binary Search Tree)
二叉树的查找一般是通过遍历去实现,效率较低,因为元素的顺序没有规律。二叉查找树就是一种专门为查找而设计的树形数据结构,可以大大提高查找效率。
二叉查找树的定义:
若左子树非空,则左子树上所有的结点的值均小于根节点的值;
若右子树非空,则右子树上所有的结点的值均大于根结点的值;
左、右子树也分别是二叉查找树
其实二叉查找树的定义跟堆的定义挺像的,建议将两者比较着去记。由二叉查找树的定义可以得知,结点的值不允许重复,它的中序遍历是有序的。
下面实现自己定义的二叉查找树:
#pragma once
#include<iostream>
template<typename T>
struct BSTreeNode {
T data;
BSTreeNode<T>* leftChild, * rightChild;
BSTreeNode() :data(NULL), leftChild(nullptr), rightChild(nullptr) {}
BSTreeNode(T x) :data(x), leftChild(nullptr), rightChild(nullptr) {}
};
template<typename T>
class BinarySearchTree {
BSTreeNode<T>* root;
void DeleteTree(BSTreeNode<T>* head);
void In(BSTreeNode<T>* head) const;
public:
BinarySearchTree() :root(nullptr) {}
BinarySearchTree(const T& data);
~BinarySearchTree();
bool BSTSearch(const T& target) const;
void BSTInsert(const T& nodedata);
void BSTRemove(const T& target);
void InOrderPrint() const;
};
template<typename T>
void BinarySearchTree<T>::DeleteTree(BSTreeNode<T>* head) {
if (head != nullptr) {
DeleteTree(head->leftChild);
DeleteTree(head->rightChild);
delete head;
}
}
template<typename T>
void BinarySearchTree<T>::In(BSTreeNode<T>* head) const {
if (head != nullptr) {
In(head->leftChild);
std::cout << head->data << " ";
In(head->rightChild);
}
}
template<typename T>
BinarySearchTree<T>::BinarySearchTree(const T& data) {
root = new BSTreeNode<T>(data);
}
template<typename T>
BinarySearchTree<T>::~BinarySearchTree() {
DeleteTree(root);
}
template<typename T>
bool BinarySearchTree<T>::BSTSearch(const T& target) const {
BSTreeNode<T>* node = root;
while (node) {
if (target < node->data) {
node = node->leftChild;
}
else if (target > node->data) {
node = node->rightChild;
}
else {
break;
}
}
if (node) {
return true;
}
else {
return false;
}
}
template<typename T>
void BinarySearchTree<T>::BSTInsert(const T& nodedata) {
if (!root) {
root = new BSTreeNode<T>(nodedata);
return;
}
BSTreeNode<T>* temp = nullptr;
BSTreeNode<T>* current = root;
while (current) {
if (nodedata < current->data) {
temp = current;
current = current->leftChild;
continue;
}
else if (nodedata > current->data) {
temp = current;
current = current->rightChild;
continue;
}
else {
break;
}
}
if (!temp) {
return;
}
current = new BSTreeNode<T>(nodedata);
if (temp->data > current->data) {
temp->leftChild = current;
}
else {
temp->rightChild = current;
}
}
template<typename T>
void BinarySearchTree<T>::BSTRemove(const T& target) {
if (!root) {
std::cout << "Root is empty. " << std::endl;
return;
}
BSTreeNode<T>* tempParent = nullptr;
BSTreeNode<T>* tempChild = root;
while (tempChild) {
if (target < tempChild->data) {
tempParent = tempChild;
tempChild = tempChild->leftChild;
continue;
}
else if (target > tempChild->data) {
tempParent = tempChild;
tempChild = tempChild->rightChild;
continue;
}
else {
break;
}
}
if (!tempChild) {
std::cout << "Don't exist. " << std::endl;
return;
}
if (tempChild->leftChild == nullptr && tempChild->rightChild == nullptr) {
delete tempChild;
}
else if (tempChild->leftChild != nullptr && tempChild->rightChild == nullptr) {
if (tempParent->leftChild == tempChild) {
tempParent->leftChild = tempChild->leftChild;
delete tempChild;
}
else {
tempParent->rightChild = tempChild->leftChild;
delete tempChild;
}
}
else if (tempChild->leftChild == nullptr && tempChild->rightChild != nullptr) {
if (tempParent->leftChild == tempChild) {
tempParent->leftChild = tempChild->rightChild;
delete tempChild;
}
else {
tempParent->rightChild = tempChild->rightChild;
delete tempChild;
}
}
else {
BSTreeNode<T>* temp = tempChild->rightChild;
while (temp->rightChild) {
temp = temp->rightChild;
}
if (tempParent->leftChild == tempChild) {
tempParent->leftChild = temp;
temp->rightChild = tempChild->rightChild;
temp->leftChild = tempChild->leftChild;
delete tempChild;
}
else {
tempParent->rightChild = temp;
temp->leftChild = tempChild->leftChild;
temp->rightChild = tempChild->rightChild;
delete tempChild;
}
}
std::cout << "Done. " << std::endl;
}
template<typename T>
void BinarySearchTree<T>::InOrderPrint() const {
In(root);
}
实现了一些基本的功能:查找、插入、移除、中序遍历,最后测试一下成果:
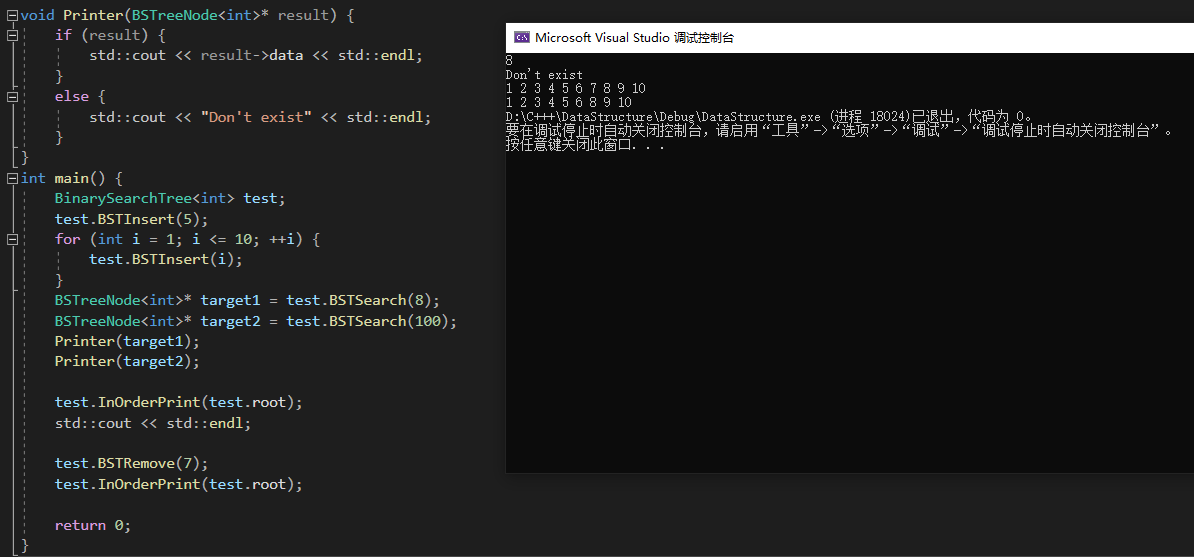
可以看出来中序遍历就是升序排序之后再输出的结果,这点非常好用。
另外需要注意的是移除操作,如果只是单纯删除目标结点,有可能导致删除后的二叉树不满足查找树的性质,所以为了解决这个问题,有两种做法:
- 在目标结点的左子树中找到最大值所在的结点补到被移除结点处
- 在目标结点的右子树中找到最小值所在的结点补到被移除结点处
两种方法都能保证删除后的二叉树依然满足查找树的性质,我用了第一种方法,就是在左子树中找最右的结点。还有一点要指出,在实现插入、移除功能的时候,频繁使用了父节点的数据,所以如果希望代码好看点,可以把树的结点设计成带父节点指针的三叉链表,方便读取父节点的信息。
平衡二叉树(Balanced Binary Sort Tree)
在写完查找树之后可以思考一下,怎样的查找树查找性能最优?答案是:树的高度应该为最小。满二叉树和完全二叉树的高度都是最小的,但是要在插入或者删除结点之后维持其高度最小的代价较大。平衡二叉查找树是一种可以兼顾查找和维护性能的折中方案。
平衡二叉查找树,简称平衡二叉树,它是具有以下性质的二叉树:
- 左子树和右子树的高度之差绝对值不超过1
- 它的左子树和右子树都是平衡二叉树
定义的第二条需要注意,平衡二叉树本身是二叉查找树。我们把左子树和右子树的高度之差定义为平衡因子(Balance Factor),按照平衡二叉树的定义,每个结点的平衡因子只可能为-1、0、1,只要有一个结点的平衡因子的绝对值大于1,那么这棵树就失去了平衡。
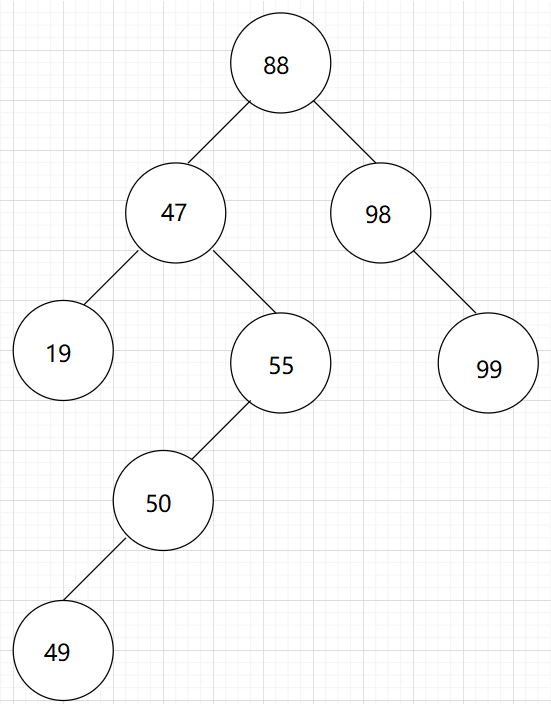
在平衡二叉树中插入一个新的结点后,从该结点起向上寻找第一个不平衡的结点(平衡因子变成了2或-2),以确定该树是否失衡。如果找到了,则以该结点为根的子树称为最小失衡树。如下图,在插入了49之后,以55为根结点的子树即为最小失衡树。
我们根据插入结点的位置,把最小失衡树分了四类:
- LL型:在最小失衡树的左孩子的左子树上插入结点
- RR型:在最小失衡树的右孩子的右子树上插入结点
- LR型:在最小失衡树的左孩子的右子树上插入结点
- RL型:在最小失衡树的右孩子的左子树上插入结点
对于简单的LL和RR型只需要一次右旋和左旋就能恢复平衡:
右旋是以最小失衡树的左孩子为轴(A结点),对根节点进行右旋(B结点),同时A结点的右子树会成为B结点的左子树。
左旋就是跟右旋相反的操作。它是以B结点为轴进行旋转,B结点的左子树会成为A结点的右子树。
简单的LL和RR型很好解决(其实也不是很好解决= =),那对于复杂一点的LR和RL型其实就是需要两次旋转。对于LR型,可以先进行左旋,再进行右旋;对于RL型,则先进行右旋再进行左旋。实在找不到好的动图,大家自己画图理解一下吧。(摸了)
事实上平衡二叉树有很多种,最出名的是由前苏联数学家Adelse-Velskil和Landis在1962年提出的高度平衡二叉树,根据提出者的英文名字首写字母简称为AVL树。接下来我们实现一下平衡二叉树:
template <typename T>
struct AVLTreeNode {
T data;
int height;
AVLTreeNode<T>* leftChild;
AVLTreeNode<T>* rightChild;
AVLTreeNode<T>(const T& theData) : data(theData), leftChild(nullptr), rightChild(nullptr), height(0) {}
};
template <typename T>
class AVLTree {
public:
AVLTree<T>() :root(nullptr) {}
~AVLTree<T>() {}
void Insert(T nodedata);
void DeleteNode(T nodedata);
void Search(T& nodedata);
void InorderPrinter();
private:
AVLTreeNode<T>* root;
void Add(AVLTreeNode<T>*& t, T& x); //插入的内部接口
bool Delete(AVLTreeNode<T>*& t, T& x); //删除的内部接口
bool Find(AVLTreeNode<T>* t, const T& x) const; //查找的内部接口
void InorderTraversal(AVLTreeNode<T>* t); //中序遍历的内部接口
AVLTreeNode<T>* FindMin(AVLTreeNode<T>* t) const; //查找最小值结点
AVLTreeNode<T>* FindMax(AVLTreeNode<T>* t) const; //查找最大值结点
int GetHeight(AVLTreeNode<T>* t); //求树的高度
AVLTreeNode<T>* LL_Rotate(AVLTreeNode<T>* t); //左旋
AVLTreeNode<T>* RR_Rotate(AVLTreeNode<T>* t); //右旋
AVLTreeNode<T>* LR_Rotate(AVLTreeNode<T>* t); //双旋,右左
AVLTreeNode<T>* RL_Rotate(AVLTreeNode<T>* t); //双旋,左右
};
template<typename T>
void AVLTree<T>::Insert(T nodedata) {
Add(root, nodedata);
}
template<typename T>
void AVLTree<T>::DeleteNode(T nodedata) {
Delete(root, nodedata);
}
template<typename T>
void AVLTree<T>::Search(T& nodedata) {
Find(root, nodedata);
}
template<typename T>
void AVLTree<T>::InorderPrinter() {
InorderTraversal(root);
}
template <typename T>
void AVLTree<T>::Add(AVLTreeNode<T>*& t, T& x) {
if (!t) {
t = new AVLTreeNode<T>(x);
}
else if (x < t->data) {
Add(t->leftChild, x);
if (GetHeight(t->leftChild) - GetHeight(t->rightChild) > 1) {
if (x < t->leftChild->data) {
t = LL_Rotate(t);
}
else {
t = LR_Rotate(t);
}
}
}
else if (x > t->data) {
Add(t->rightChild, x);
if (GetHeight(t->rightChild) - GetHeight(t->leftChild) > 1) {
if (x > t->rightChild->data) {
t = RR_Rotate(t);
}
else {
t = RL_Rotate(t);
}
}
}
else {
}
t->height = std::max(GetHeight(t->leftChild), GetHeight(t->rightChild)) + 1;
}
template <typename T>
bool AVLTree<T>::Delete(AVLTreeNode<T>*& t, T& x) {
if (t == nullptr) {
return false;
}
else if (t->data == x) {
if (t->leftChild != nullptr && t->rightChild != nullptr) {
if (GetHeight(t->leftChild) > GetHeight(t->rightChild)) {
t->data = FindMax(t->leftChild)->data;
Delete(t->leftChild, t->data);
}
else {
t->data = FindMin(t->rightChild)->data;
Delete(t->rightChild, t->data);
}
}
else {
AVLTreeNode<T>* old = t;
t = t->leftChild ? t->leftChild : t->rightChild;
delete old;
}
}
else if (x < t->data) {
Delete(t->leftChild, x);
if (GetHeight(t->rightChild) - GetHeight(t->leftChild) > 1) {
if (GetHeight(t->rightChild->leftChild) > GetHeight(t->rightChild->rightChild)) {
t = RL_Rotate(t);
}
else {
t = RR_Rotate(t);
}
}
else {
t->height = std::max(GetHeight(t->leftChild), GetHeight(t->rightChild)) + 1;
}
}
else {
Delete(t->rightChild, x);
if (GetHeight(t->leftChild) - GetHeight(t->rightChild) > 1) {
if (GetHeight(t->leftChild->rightChild) > GetHeight(t->leftChild->leftChild)) {
t = LR_Rotate(t);
}
else {
t = LL_Rotate(t);
}
}
else {
t->height = std::max(GetHeight(t->leftChild), GetHeight(t->rightChild)) + 1;
}
}
return true;
}
template <typename T>
bool AVLTree<T>::Find(AVLTreeNode<T>* t, const T& x) const {
if (t == nullptr) {
return false;
}
if (x < t->data) {
return Find(t->leftChild, x);
}
else if (x > t->data) {
return Find(t->rightChild, x);
}
else {
return true;
}
}
template <typename T>
void AVLTree<T>::InorderTraversal(AVLTreeNode<T>* t) {
if (t) {
InorderTraversal(t->leftChild);
std::cout << t->data << ' ';
InorderTraversal(t->rightChild);
}
}
template <typename T>
AVLTreeNode<T>* AVLTree<T>::FindMax(AVLTreeNode<T>* t) const {
if (t == nullptr) {
return nullptr;
}
if (t->rightChild == nullptr) {
return t;
}
return FindMax(t->rightChild);
}
template <typename T>
AVLTreeNode<T>* AVLTree<T>::FindMin(AVLTreeNode<T>* t) const {
if (t == nullptr) {
return nullptr;
}
if (t->leftChild == nullptr) {
return t;
}
return FindMin(t->leftChild);
}
template <typename T>
int AVLTree<T>::GetHeight(AVLTreeNode<T>* t) {
if (t == nullptr) {
return -1;
}
else {
return t->height;
}
}
template <typename T>
AVLTreeNode<T>* AVLTree<T>::LL_Rotate(AVLTreeNode<T>* t) {
AVLTreeNode<T>* q = t->leftChild;
t->leftChild = q->rightChild;
q->rightChild = t;
t = q;
t->height = std::max(GetHeight(t->leftChild), GetHeight(t->rightChild)) + 1;
q->height = std::max(GetHeight(q->leftChild), GetHeight(q->rightChild)) + 1;
return q;
}
template <typename T>
AVLTreeNode<T>* AVLTree<T>::RR_Rotate(AVLTreeNode<T>* t) {
AVLTreeNode<T>* q = t->rightChild;
t->rightChild = q->leftChild;
q->leftChild = t;
t = q;
t->height = std::max(GetHeight(t->leftChild), GetHeight(t->rightChild)) + 1;
q->height = std::max(GetHeight(q->leftChild), GetHeight(q->rightChild)) + 1;
return q;
}
template <typename T>
AVLTreeNode<T>* AVLTree<T>::LR_Rotate(AVLTreeNode<T>* t) {
AVLTreeNode<int>* q = RR_Rotate(t->leftChild);
t->leftChild = q;
return LL_Rotate(t);
}
template <typename T>
AVLTreeNode<T>* AVLTree<T>::RL_Rotate(AVLTreeNode<T>* t) {
AVLTreeNode<int>* q = RR_Rotate(t->rightChild);
t->rightChild = q;
return RR_Rotate(t);
}
上面简单实现了一下AVL树的一些基本操作,旋转和删除结点操作是我个人认为最难实现的部分,建议画图去辅助理解,同时还能对比查找树的做法,因为平衡树也是一种查找树,他们二者肯定是有很多相似之处的。
最后写一个例子测试一下:
中序遍历还是有序的输出,符合我们的要求。
图(Graph)
图形结构是一种比树形结构更复杂的非线性数据结构,而且概念也特别多,下面一点点地来了解它。
基本术语
在图中,将数据元素称为顶点(Vertex),顶点之间的关系称为边(Edge),图由有限顶点集V和有限边集E组成,记为:G=(V, E),其中顶点总数记为n,边的总数记为e。
为了解释方便,用一张图来形容有向图和无向图:
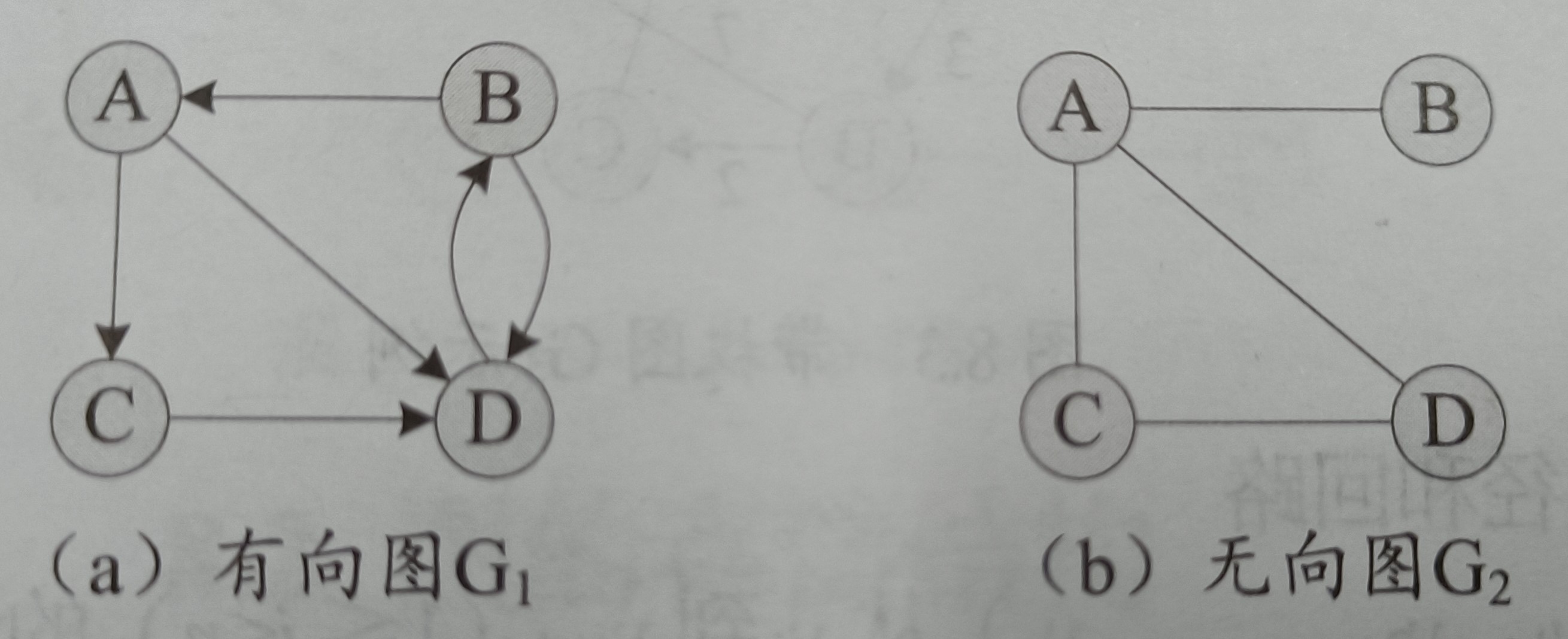
有向图的边是带方向的,只能按照箭头的方向去访问其他顶点。有向图的边称为有向边,或者弧(Arc)。无向图的边则没有方向性,称为无向边,简称边,两顶点间可以相互访问。
假设两个图G=(V, E)和G'=(V', E'),如果V'⊆V且E'⊆E,则称G'为G的子图。说人话就是在G中切割一部分出来,不改变边的方向,那切割的那些部分都是G的子图。
包含所有可能的边的图称为完全图。无向完全图包含n (n - 1) / 2条边,有向完全图包含n (n - 1)条弧。说人话就是把所有顶点之间都牵条线,无向图就变无向完全图了。对于有向图就要考虑方向性,除了“过去”还要“回来”,所以每个顶点之间牵两条线,就这么简单。
在图中,顶点的度(Degree)是指依附于该顶点的边数。无向图中就看顶点有多少条边就行了。对于有向图,还要区分入度(InDegree)和出度(OutDegree),入度是指该顶点为终点的弧的数目,出度是指以该顶点为起点的弧的数目,有向图顶点的度是出度和入度之和。
有时候,边或弧需要附加一些属性信息,比如两个顶点之间的距离、旅行时间或者某种代价等,通常称此信息为权(Weight),带权的图又称为带权图,或简称为网(Network)。
如果从顶点A₁到顶点Aₙ的边(弧)都存在,则称存在从顶点A₁到顶点Aₙ的长度为n - 1的路径。如果路径上顶点都不同,则称这个路径为简单路径。路径长度是指路径包含的边数。如果一条路径从某个顶点出发,最终连接到它自身,则称此路径为回路。
在无向图中,如果顶点A₁到顶点Aₙ有路径,则称A₁和Aₙ是连通的。如果图中任意两个顶点都是连通的,则称此图为连通图(Connected Graph)。在有向图中,如果顶点A₁到顶点Aₙ有路径,顶点Aₙ到顶点A₁也有路径,则称A₁和Aₙ是连通的。如果图中任意两个顶点都是连通的,则称此图为强连通图(Strong Connected Graph)。
连通图的生成树(Spanning Tree)是含有所有顶点且只有n - 1条边的连通子图。首先,它包含了所有的顶点;齐次,它只有n - 1条边;最后,它是子图。这三点很重要,不要看到有n - 1条边就说这是生产树。
邻接矩阵和邻接表
图这么复杂,我们要怎么去存它呢?基于多对多这一性质,我们可以设计一种叫邻接矩阵(Adjacency Matrix)和邻接表(Adjacency List)的结构去储存它,下面是两种结构的示意图:
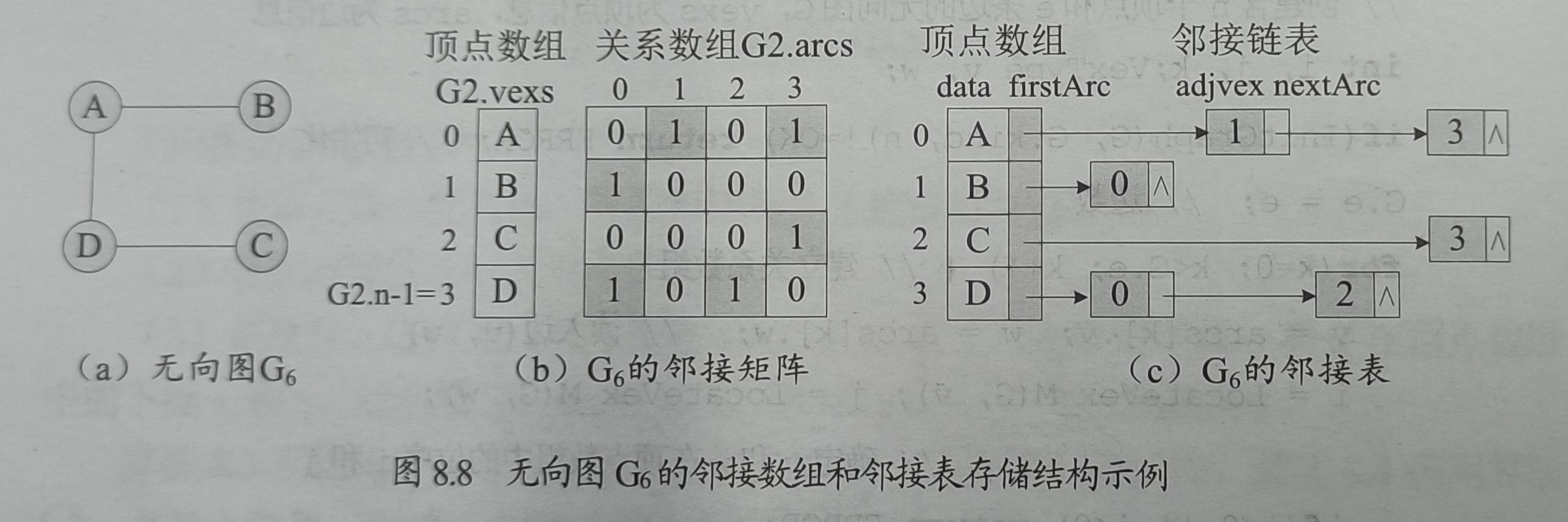
两种结构都有一个顶点数组,用来存放顶点的一些信息,比如名字、顺序等。邻接矩阵的关系数组是存边的信息,它是一个二维数组,如果存在顶点V[i]到V[j]的边,关系数组的A[i][j]就等于1,如果没有,就等于0,对于网还可以存权。容易得出,左上到右下的对角线自然全是0,因为自己不用跟自己连线。而邻接表就更直观了,用了单链表的方法,把相邻的顶点接在一起。对于有向图和无向图,两者的实现上有是区别的,这也导致两者在性能上有所不同。当图的边数很少时(即稀疏图),关系数组含有大量0,浪费了大量内存。在存储稀疏图的时候会更常用邻接表。
在设计上,邻接矩阵本质上就是矩阵,所以可以用一个二维数组去存。对于邻接表,本质上是若干链表组成的,所以可以用一个数组去存每个链表的头节点。
图的遍历
图的遍历有两种:广度优先遍历和深度优先遍历,又叫广度优先搜索(BFS)和深度优先搜索(DFS)。其实对于深度优先遍历,我们在二叉树那一块用的比较多了,前、中、后序遍历的思想都是深度优先遍历:一条路走到底。对于广度优先遍历,其实二叉树的层次遍历就是这样的思想:把邻接的、尚未访问过的节点都访问一遍。对于两种遍历我通过两道LeetCode来说明。
深度优先搜索
首先是深度优先搜索:
class Solution {
public:
vector<vector<int>> result;
vector<int> temp;
void dfs(vector<vector<int>>& graph, int x, int n) {
if (x == n) {
result.push_back(temp);
return;
}
for (auto& y : graph[x]) {
temp.push_back(y);
dfs(graph, y, n);
temp.pop_back();
}
}
vector<vector<int>> allPathsSourceTarget(vector<vector<int>>& graph) {
temp.push_back(0);
dfs(graph, 0, graph.size() - 1);
return result;
}
};
题目中的有向无环图(Directed Acyclic Graph)是指不存在回路的有向图。对于搜索路径,我们可以从起点出发,顺着任意路径探索到达终点的路径,如果找到了,就将路径保存到数组中。由于这是一个有向无环图,所以不用担心会原地转圈。这里的搜索路径是沿着一条路走到底的,符合DFS的思想。
广度优先搜索
同意是上面的题目,我也可以用广度优先搜索:
class Solution {
public:
vector<vector<int>> allPathsSourceTarget(vector<vector<int>>& graph) {
queue<vector<int>> que;
que.push({0});
while (!que.empty()) {
auto path = que.front();
que.pop();
auto cur = path.back();
for (auto& next : graph[cur]) {
path.push_back(next);
if (next == (int)graph.size() - 1) {
ans.push_back(path);
}
else {
que.push(path);
}
path.pop_back();
}
}
return ans;
}
private:
vector<vector<int>> ans;
};
我用的是DFS,BFS是在题解里面找的。道理也很简单,用一个队列存图,然后暴力遍历,直到找到目的地。
结语
断断续续写了两个月,有懒的原因,也有学习上的原因。这学期的课超多作业,每周都要写40道大题,传热学和工程热力学简直要我命= =。另外腾讯的UE公开课也占用了我不少时间,最近也开始学UE了,时间完全不够用。我知道最后的图论介绍太少了,一些经典算法没有展示。但是我想这只是对数据结构的基本介绍,感兴趣的可以自己的往深学,比如我现在还没写出来的Dijkstra算法。另外平衡树之前的代码有点臭,但是有点懒得改了。总之,这篇博客暂时先这样了,后面可能会慢慢更新,再说吧。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号