


opencv常用矩阵操作(加、减、乘、逆、均值、标准差)
OpenCV中的矩阵操作非常重要,本文总结了矩阵的创建、初始化以及基本矩阵操作主要内容包括:
- 创建与初始化
- 矩阵加减法
- 矩阵乘法
- 矩阵转置
- 矩阵求逆
- 矩阵非零元素个数
- 矩阵均值与标准差
- 矩阵全局极值及位置
- 其他矩阵运算函数列表
1. 创建与初始化矩阵
1.1 数据类型
建立矩阵必须要指定矩阵存储的数据类型,图像处理中常用的几种数据类型如下:
CV_8UC1// 8位无符号单通道 CV_8UC3// 8位无符号3通道 CV_8UC4 CV_32FC1// 32位浮点型单通道 CV_32FC3// 32位浮点型3通道 CV_32FC4
包括数据位深度8位、32位,数据类型U:uchar、F:float型以及通道数C1:单通道、C3:三通道、C4:四通道。
1.2 基本方法
我们可以通过载入图像来创建Mat类型矩阵,当然也可以直接手动创建矩阵,基本方法是指定矩阵尺寸和数据类型:
1 // 基本方法 2 cv::Mat a(cv::Size(5,5),CV_8UC1); // 单通道 3 cv::Mat b = cv::Mat(cv::Size(5,5),CV_8UC3); //3通道每个矩阵元素包含3个uchar值 4 cout<<"a = "<<endl<<a<<endl<<endl; 5 cout<<"b = "<<endl<<b<<endl<<endl; 6 system("pause");
运行结果:
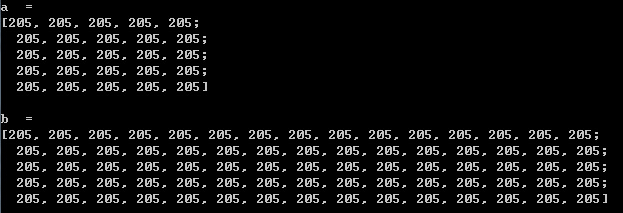
3通道矩阵中,一个矩阵元素包含3个变量。
1.3 初始化方法
上述方法不初始化矩阵数据,因此将出现随机值。如果想避免这种情况,可使用Mat类的几种初始化创建矩阵的方法:
// 初始化方法 cv::Mat mz = cv::Mat::zeros(cv::Size(5,5),CV_8UC1); // 全零矩阵 cv::Mat mo = cv::Mat::ones(cv::Size(5,5),CV_8UC1); // 全1矩阵 cv::Mat me = cv::Mat::eye(cv::Size(5,5),CV_32FC1); // 对角线为1的对角矩阵 cout<<"mz = "<<endl<<mz<<endl<<endl; cout<<"mo = "<<endl<<mo<<endl<<endl; cout<<"me = "<<endl<<me<<endl<<endl;
运行结果:

2. 矩阵运算
2.1 基本概念
OpenCV的Mat类允许所有的矩阵运算。
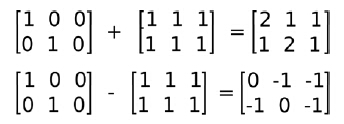
2.2 矩阵加减法
我们可以使用"+"和"-"符号进行矩阵加减运算。
cv::Mat a= Mat::eye(Size(3,2), CV_32F); cv::Mat b= Mat::ones(Size(3,2), CV_32F); cv::Mat c= a+b; cv::Mat d= a-b;
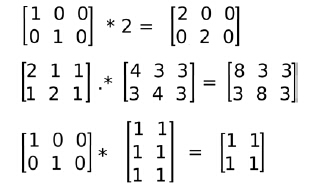
2.3 矩阵乘法
使用"*"号计算矩阵与标量相乘,矩阵与矩阵相乘(必须满足矩阵相乘的行列数对应规则)
Mat m1= Mat::eye(2,3, CV_32F); //使用cv命名空间可省略cv::前缀,下同 Mat m2= Mat::ones(3,2, CV_32F); cout<<"m1 = "<<endl<<m1<<endl<<endl; cout<<"m2 = "<<endl<<m2<<endl<<endl; // Scalar by matrix cout << "\nm1.*2 = \n" << m1*2 << endl; // matrix per element multiplication cout << "\n(m1+2).*(m1+3) = \n" << (m1+1).mul(m1+3) << endl; // Matrix multiplication cout << "\nm1*m2 = \n" << m1*m2 << endl;
2.4 矩阵转置
矩阵转置是将矩阵的行与列顺序对调(第i行转变为第i列)形成一个新的矩阵。OpenCV通过Mat类的t()函数实现。
// 转置 Mat m1= Mat::eye(2,3, CV_32F); Mat m1t = m1.t(); cout<<"m1 = "<<endl<<m1<<endl<<endl; cout<<"m1t = "<<endl<<m1t<<endl<<endl; system("pause");
运行结果:

2.5 求逆矩阵
逆矩阵在某些算法中经常出现,在OpenCV中通过Mat类的inv()方法实现
1 // 求逆 2 Mat meinv = me.inv(); 3 cout<<"me = "<<endl<<me<<endl<<endl; 4 cout<<"meinv = "<<endl<<meinv<<endl<<endl; 5 system("pause");
运行结果:
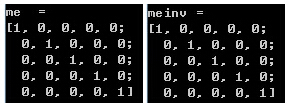
单位矩阵的逆就是其本身。
2.6 计算矩阵非零元素个数
计算物体的像素或面积常需要用到计算矩阵中的非零元素个数,OpenCV中使用countNonZero()函数实现
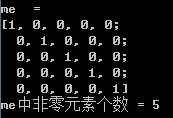
1 // 非零元素个数 2 int nonZerosNum = countNonZero(me); // me为输入矩阵或图像 3 cout<<"me = "<<endl<<me<<endl; 4 cout<<"me中非零元素个数 = "<<nonZerosNum<<endl<<endl; 5 system("pause");
运行结果:
2.7 均值和标准差
OpenCV提供了矩阵均值和标准差计算功能,可以使用meanStdDev(src,mean,stddev)函数实现。
参数
- src – 输入矩阵或图像
- mean – 均值,OutputArray
- stddev – 标准差,OutputArray
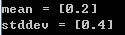
1 // 均值方差 2 Mat mean; 3 Mat stddev; 4 meanStdDev(me, mean, stddev); //me为前文定义的5×5对角阵 5 cout<<"mean = "<<mean<<endl; 6 cout<<"stddev = "<<stddev<<endl; 7 system("pause");
运行结果:
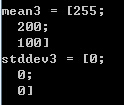
需要说明的是,如果src是多通道图像或多维矩阵,则函数分别计算不同通道的均值与标准差,因此返回值mean和stddev为对应维度的向量。
1 Mat mean3; 2 Mat stddev3; 3 Mat m3(cv::Size(5,5),CV_8UC3,Scalar(255,200,100)); 4 cout<<"m3 = "<<endl<<m3<<endl<<endl; 5 meanStdDev(m3, mean3, stddev3); 6 cout<<"mean3 = "<<mean3<<endl; 7 cout<<"stddev3 = "<<stddev3<<endl; 8 system("pause");
多通道矩阵运算结果:

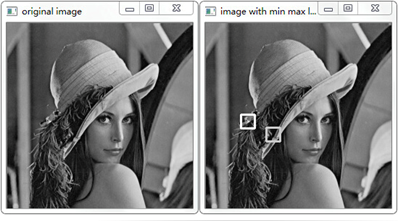
2.8 求最大最小值
求输入矩阵的全局最大最小值及其位置,可使用函数:
1 void minMaxLoc(InputArray src, CV_OUT double* minVal, 2 CV_OUT double* maxVal=0, CV_OUT Point* minLoc=0, 3 CV_OUT Point* maxLoc=0, InputArray mask=noArray());
参数:
src – 输入单通道矩阵(图像).
minVal – 指向最小值的指针, 如果未指定则使用NULL
maxVal – 指向最大值的指针, 如果未指定则使用NULL
minLoc – 指向最小值位置(2维情况)的指针, 如果未指定则使用NULL
maxLoc – 指向最大值位置(2维情况)的指针, 如果未指定则使用NULL
mask – 可选的蒙版,用于选择待处理子区域
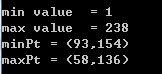
1 // 求极值 最大、最小值及其位置 2 Mat img = imread("Lena.jpg",0); 3 imshow("original image",img); 4 5 double minVal=0,maxVal=0; 6 cv::Point minPt, maxPt; 7 minMaxLoc(img,&minVal,&maxVal,&minPt,&maxPt); 8 cout<<"min value = "<<minVal<<endl; 9 cout<<"max value = "<<maxVal<<endl; 10 cout<<"minPt = ("<<minPt.x<<","<<minPt.y<<")"<<endl; 11 cout<<"maxPt = ("<<maxPt.x<<","<<maxPt.y<<")"<<endl; 12 cout<<endl; 13 14 cv::Rect rectMin(minPt.x-10,minPt.y-10,20,20); 15 cv::Rect rectMax(maxPt.x-10,maxPt.y-10,20,20); 16 17 cv::rectangle(img,rectMin,cv::Scalar(200),2); 18 cv::rectangle(img,rectMax,cv::Scalar(255),2); 19 20 imshow("image with min max location",img); 21 cv::waitKey();
运行结果:
其他矩阵运算函数见:https://blog.csdn.net/iracer/article/details/51296631
转载于:https://blog.csdn.net/iracer/article/details/51296631

