
相机内参矩阵原理
相机内参矩阵原理:
首先,我们需要知道四个坐标系。即图像像素坐标系 (u,v)、图像物理坐标系(x,y)、相机坐标系(Xc,Yc,Zc)和 世界坐标系(Xw,Yw,Zw)(标定板所在的坐标系)。
其次,我们要知道像素坐标系(u,v)与图像物理坐标系(x,y)的关系。像素坐标系不利于坐标变换,因此需要建立图像坐标系XOY,原点是相机光轴与相面的交点(称为主点),即图像的中心点。X轴、Y轴分别与u轴、v轴平行。故两个坐标系实际是平移关系,即可以通过平移就可得到。
如图b所示,物理坐标系x0 y0 图像坐标系x y。
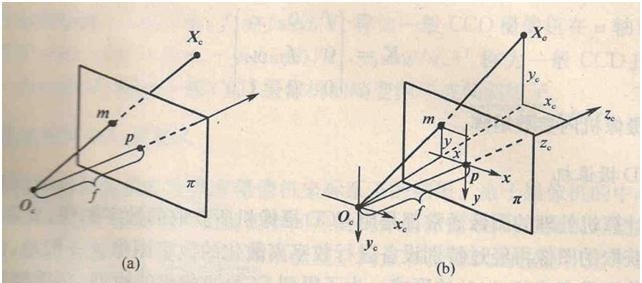
两坐标轴互相垂直如图所示:
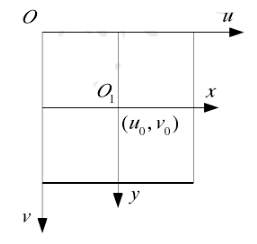
两坐标系的矩阵转化关系如下,其中dX、dY分别物理坐标系到图像坐标系,在X、Y轴方向上的比例。u0,v0为主点(图像原点)坐标。
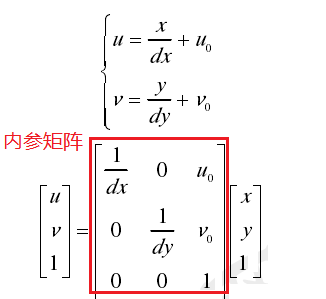
中间部分则为内参矩阵。
参考链接:https://blog.csdn.net/weixin_43197380/article/details/90438976
参考链接:https://blog.csdn.net/cashmood/article/details/100089295
旋转矩阵推导及应用:https://www.cnblogs.com/meteoric_cry/p/7987548.html
欧拉角、旋转向量、旋转矩阵相互转换:https://www.jianshu.com/p/5e130c04a602

 浙公网安备 33010602011771号
浙公网安备 33010602011771号