


OpenCV fitline直线拟合函数
OpenCV fitline直线拟合函数

 最小二乘法拟合函数
最小二乘法拟合函数
参数介绍:
void fitLine( InputArray points, OutputArray line, int distType,double param, double reps, double aeps );
points:输入待拟合直线的2D或者3D点集。
line:输出描述直线的参数,2D点集描述参数为Vec4f类型,3D点集描述参数为Vec6f类型。
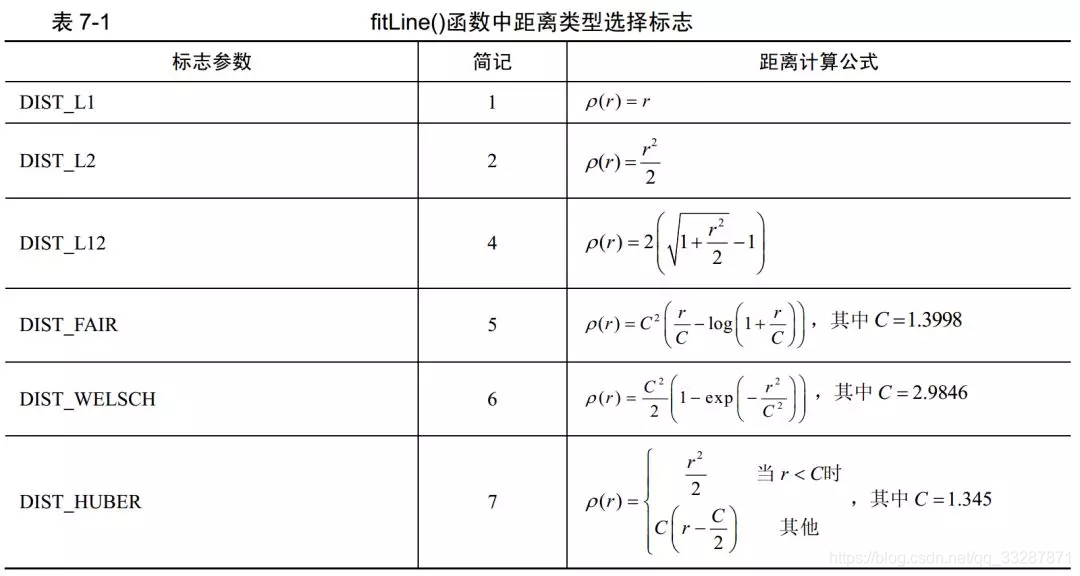
distType:M-estimator算法使用的距离类型标志,可以选择的距离类型在表7-1中给出。
param:某些类型距离的数值参数(C)。如果数值为0,则自动选择最佳值。
reps:坐标原点与直线之间的距离精度,数值0表示选择自适应参数,一般常选择0.01。
aeps:直线角度精度,数值0表示选择自适应参数,一般常选择0.01。
该函数利用最小二乘法拟合出距离所有点距离最小的直线,直线的描述形式可以转化成点斜式。函数第一个参数是待拟合直线的2D或者3D点集,
可以存放在vector<>或者Mat类型的变量中赋值给参数。函数第二个参数是拟合直线的描述参数,如果是2D点集,输出量为Vec4f类型的(vx vy x0 y0),
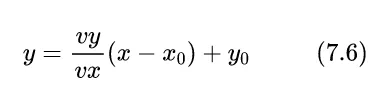
其中(vx vy)是与直线共线的归一化向量,(x0 y0)是拟合直线上的随意一点,根据这四个量可以计算得到2维平面直线的点斜式解析式,表示形式如式所示。
如果输入参数是3D点集,输出量为Vec6f类型的(vx vy vz x0 y0 z0),其中(vx vy vz)是与直线共线的归一化向量,(x0 y0 z0)是拟合直线上的随意一点。
函数第三个参数是M-estimator算法使用的距离类型标志,可以选择的距离类型在表中给出。函数第四个参数是某些距离类型中的数值参数C,如果数值0表示选择最佳值。
函数第五个参数表示坐标原点与拟合直线之间的距离精度,数值0表示选择自适应参数;函数第六个参数表示拟合直线的角度精度,数值0表示选择自适应参数。
第五个参数和第六个参数一般取值0.01。

#include "opencv2/opencv.hpp" #include <iostream> using namespace std; using namespace cv; int main() { Vec4f lines; vector<Point2f> points; const static float pts[20][2] = { {0.0f,0.0f},{10.0f,11.0f},{21.0f,20.0f},{30.0f,30.0f}, {40.0f,42.0f},{50.0f,50.0f},{60.0f,60.0f},{70.0f,70.0f}, {80.0f,80.0f},{90.0f,92.0f},{100.0f,100.0f},{110.0f,110.0f}, {120.f,120.0f},{136.0f,130.0f},{138.0f,140.0f},{150.0f,150.0f}, {160.0f,163.0f},{175.0f,170.0f},{181.0f,180.0f},{200.0f,190.0f} }; for (int i = 0; i < 20; ++i) { points.emplace_back(pts[i][0], pts[i][1]); } double param = 0.0; double reps = 0.01; double aeps = 0.01; fitLine(points, lines, DIST_L1, param, reps, aeps); cout << lines << endl; return 0; }
部分转自:https://blog.csdn.net/B08370108/article/details/118105855


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧