

Canny高低阈值边缘检测

双阀值:
一般的边缘检测算法用一个阀值来滤除噪声或颜色变化引起的小的梯度值,而保留大的梯度值。
Canny算法应用双阀值,即一个高阀值和一个低阀值来区分边缘像素。如果边缘像素点梯度值大于高阀值,则被认为是强边缘点。
如果边缘梯度值小于高阀值,大于低阀值,则标记为弱边缘点。小于低阀值的点则被抑制掉。这一步算法很简单。

代码如下:

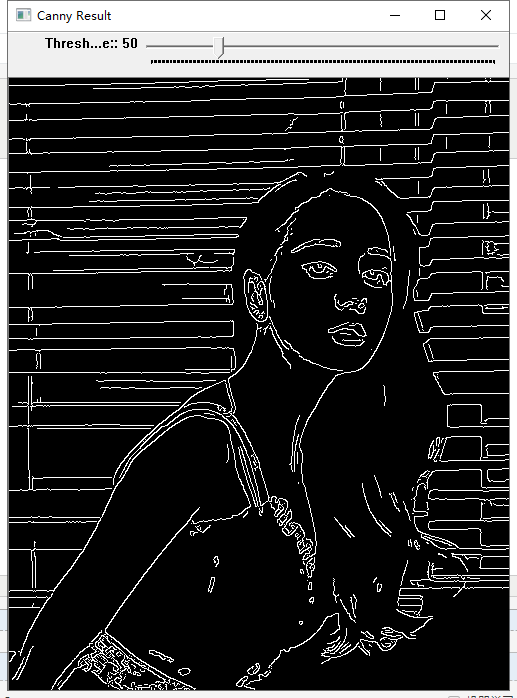
#include <opencv2/opencv.hpp> #include <iostream> #include <math.h> using namespace cv; Mat src, gray_src, dst; int t1_value = 50; int max_value = 255; const char*OUTPUT_TITLE = "Canny Result"; void Canny_Demo(int, void*); int main(int argc, char** argv) { src = imread("L:/5.jpg"); if (!src.data) { printf("could not load image...\n"); return -1; } char INPUT_TITLE[] = "input image"; namedWindow(INPUT_TITLE, CV_WINDOW_AUTOSIZE); namedWindow(OUTPUT_TITLE, CV_WINDOW_AUTOSIZE); imshow(INPUT_TITLE, src); cvtColor(src, gray_src, CV_BGR2GRAY); createTrackbar("Threshold Value:", OUTPUT_TITLE, &t1_value, max_value, Canny_Demo); Canny_Demo(0, 0); waitKey(0); return 0; } void Canny_Demo(int, void*) { Mat edge_output; blur(gray_src, gray_src, Size(3, 3), Point(-1, -1), BORDER_DEFAULT); Canny(gray_src, edge_output, t1_value, t1_value * 2, 3, false); //dst.create(src.size(), src.type()); //src.copyTo(dst, edge_output); imshow(OUTPUT_TITLE, edge_output); }
结果:



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· Vue3状态管理终极指南:Pinia保姆级教程