
图像特征-harris角点检测
转自:https://zhuanlan.zhihu.com/p/449970674
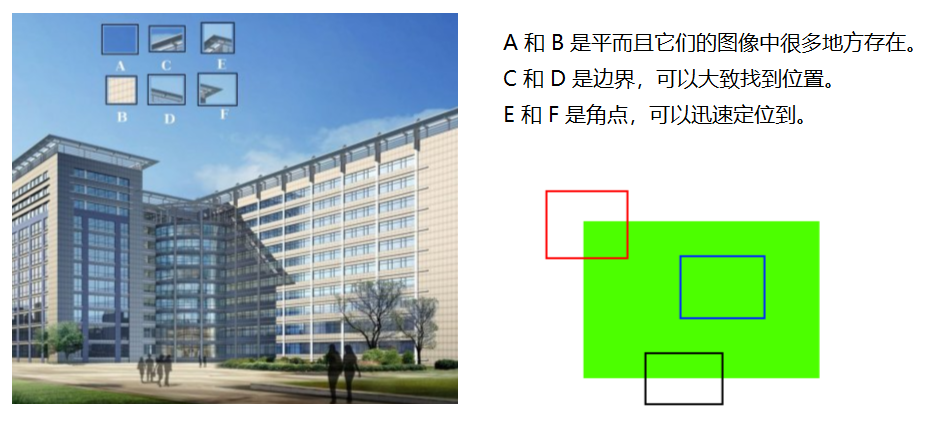
一 角点检测基本原理
角点: 沿着各个方向,图像灰度均发生变化的点,可认为是角点。
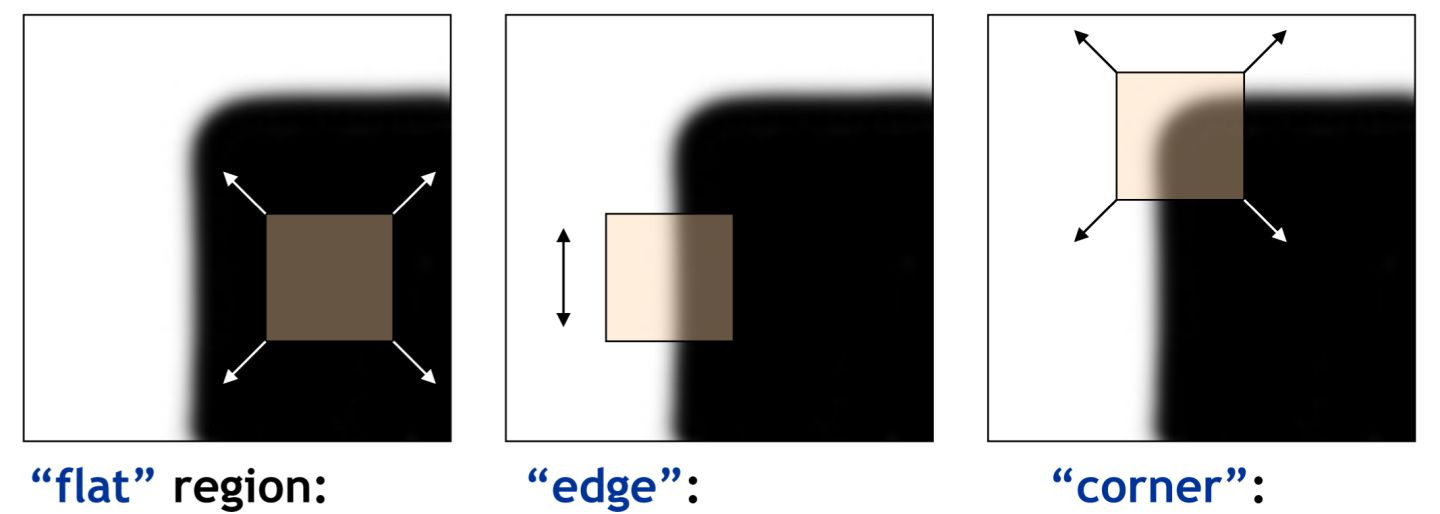
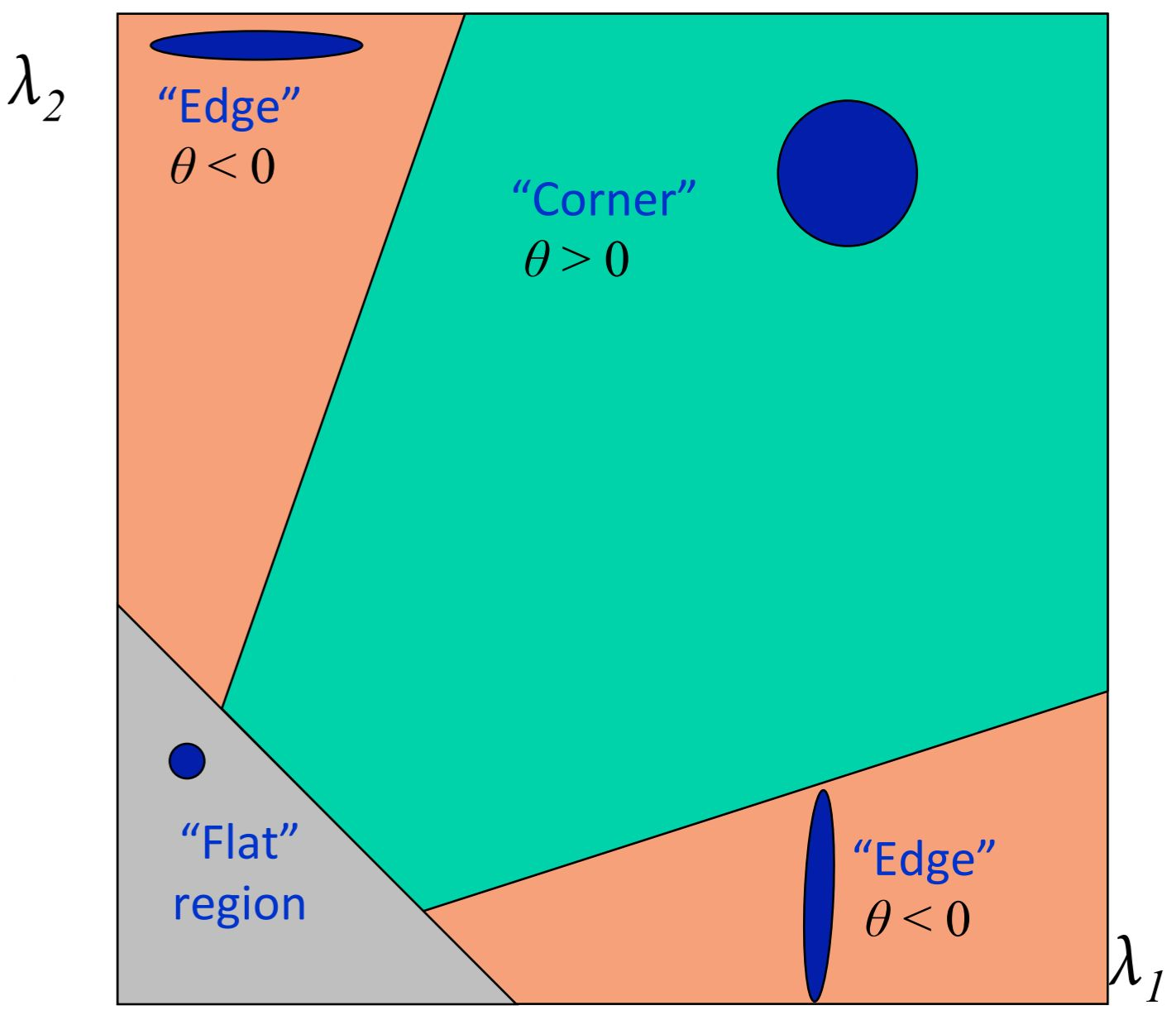
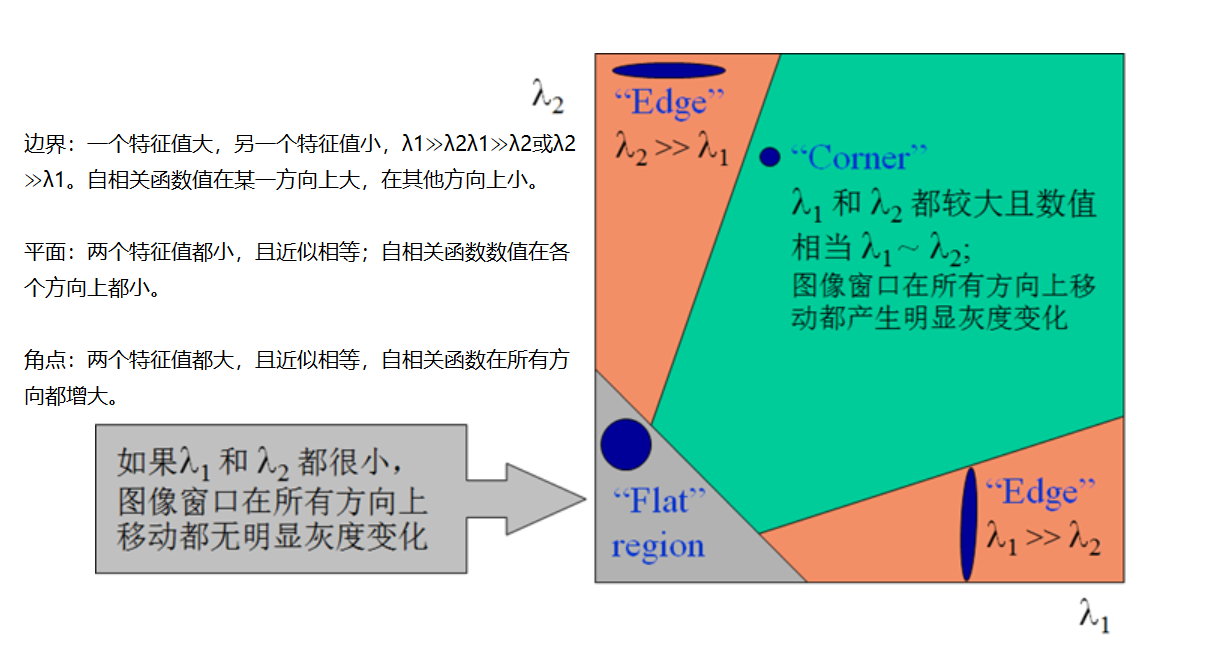
图像中三种可能的区域,“flat”、“edge”、“corner”;
- 平坦区域“flat region”,多个方向移动,平均亮度几乎没变化。
- 边缘“edge”,某个方向上亮度变化剧烈,而垂直的方向上变化很小。
- 角点“corner”,任意方向移动,平均亮度变化都很剧烈。
数学上怎么描述角点?
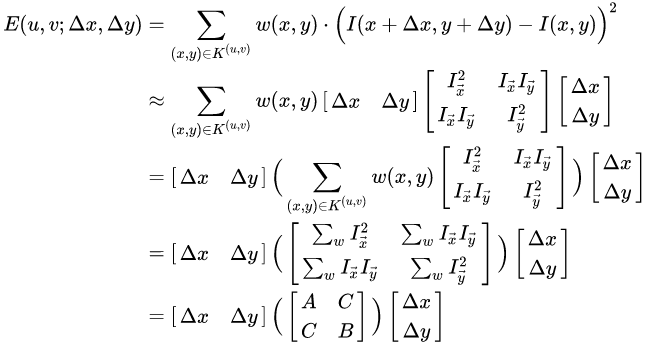
可以通过以下自相关函数来描述局部窗口的亮度变化,从而定义角点。

-
 代表当前待判定的点,其局部窗口为
代表当前待判定的点,其局部窗口为 ;
;  分别是水平、垂直方向上的偏移量;
分别是水平、垂直方向上的偏移量; 代表图像I在点
代表图像I在点 的亮度值;
的亮度值; 是局部窗口加权函数,有高斯加权和平均加权等,因为一般窗口的每个像素点贡献度是不一样的,因此需要乘以一个加权函数;
是局部窗口加权函数,有高斯加权和平均加权等,因为一般窗口的每个像素点贡献度是不一样的,因此需要乘以一个加权函数;
公式右边括号内即为局部窗口的灰度变化。
根据泰勒公式展开一阶近似后,有:
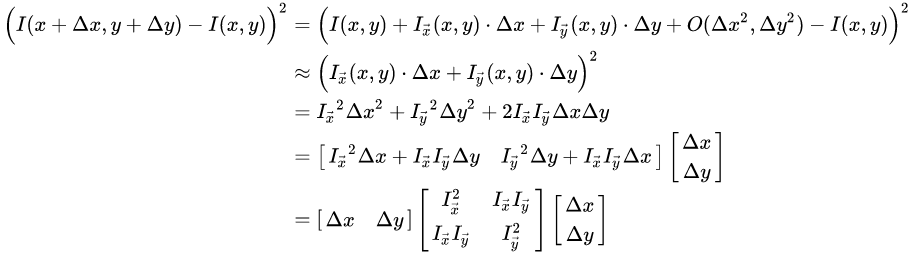
其中,
 分别代表I在(x, y)点两个方向上的梯度,简化了写法,代入亮度变化方程,得到
分别代表I在(x, y)点两个方向上的梯度,简化了写法,代入亮度变化方程,得到
将公式展开:

可见,是一个关于 的二次函数,
的二次函数,
对该函数取某个值Q(如1)的横切面,即 ,其中
,其中 由局部窗口的两个方向梯度
由局部窗口的两个方向梯度 决定,
决定,
不同局部窗口会得到不同的 ,也会得到不同的函数横切面,横切面的形状也有所不同。
,也会得到不同的函数横切面,横切面的形状也有所不同。
当 ,该函数表示椭圆(回顾椭圆性质,
,该函数表示椭圆(回顾椭圆性质, ),证明:
),证明:

因此 在值 Q 的横切面,近似是一个椭圆。
特殊情况下,
当椭圆表达式不存在 交叉项,此时椭圆的长短轴恰好在 x, y 方向上,
,
 决定了椭圆的形状,
决定了椭圆的形状,
此时,局部区域的梯度方向信息都集中在对角线上, 表征了 x 方向的梯度信息,
表征了 x 方向的梯度信息, 表征了 y 方向的梯度信息。很简单得到以下的结论:
表征了 y 方向的梯度信息。很简单得到以下的结论:
 ,该局部窗口内主要是x方向的梯度信息,y方向没有梯度,所以是边缘;
,该局部窗口内主要是x方向的梯度信息,y方向没有梯度,所以是边缘; ,该局部窗口内主要是y方向的梯度信息,x方向没有梯度,所以是边缘;
,该局部窗口内主要是y方向的梯度信息,x方向没有梯度,所以是边缘; ,该局部窗口内,两方面的梯度信息都几乎为0,所以是平坦区域;
,该局部窗口内,两方面的梯度信息都几乎为0,所以是平坦区域; ,该局部窗口内,x,y方向上都由较剧烈的梯度变化,所以是角点;
,该局部窗口内,x,y方向上都由较剧烈的梯度变化,所以是角点;
但以上的特殊情况,是实际梯度恰好垂直,不垂直的话,就只能看实际梯度信息在x,y方向的分量是多少,占据越多, 越接近于0,上述结论越靠谱。
越接近于0,上述结论越靠谱。
通常情况,
考虑实际梯度垂直,但是不在x,y方向上,呈现一定的角度,此时可以通过正交变换,消除交叉项,将椭圆旋转到实际的梯度方向上,
M是实对称矩阵,可以作特征值分解,即 ,
, 是M的两个特征值,e1、e2是特征向量。
是M的两个特征值,e1、e2是特征向量。
则亮度变化函数 ,
,
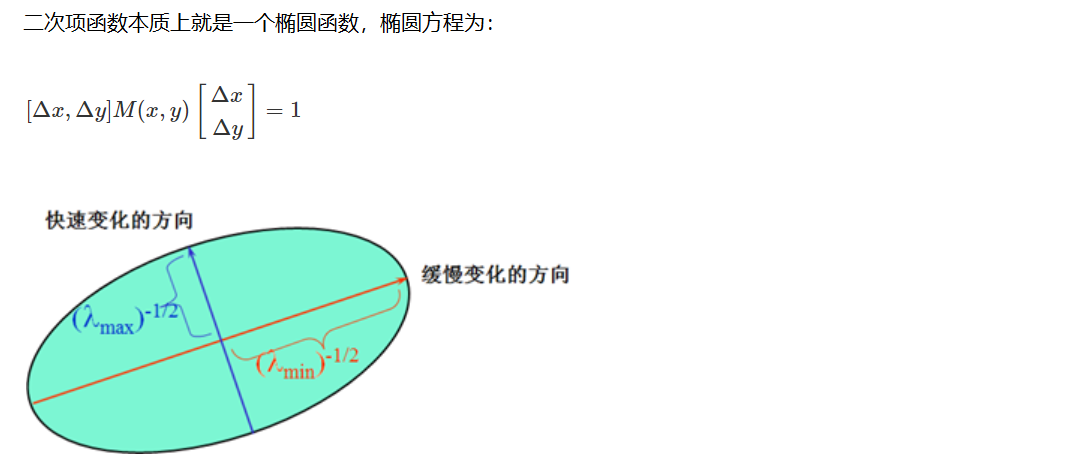
展开 ,写成椭圆的形式
,写成椭圆的形式
这是一个新的椭圆,长短轴由 决定,坐标轴方向由两个特征向量
决定。此时的椭圆恰好满足了上面的特殊情况,在垂直的新梯度方向上,实际梯度由
决定,依旧是那一套
- ,该局部窗口内主要是x方向的梯度信息,y方向没有梯度,所以是边缘;
- ,该局部窗口内主要是y方向的梯度信息,x方向没有梯度,所以是边缘;
- ,该局部窗口内,两方面的梯度信息都几乎为0,所以是平坦区域;
- ,该局部窗口内,x,y方向上都由较剧烈的梯度变化,所以是角点;
总结:
回顾上面的过程,从 是个二次函数,到取
这个横切面是个椭圆,到椭圆长短轴在不在 x, y 方向上做了分类讨论——特殊情况,恰好在 x, y 方向上,直接判断
的特征值即可;不在 x, y 方向上,特征值分解做正交变换,将椭圆旋转到长短轴与实际梯度方向重合,这时候,是在这个新方向上的特殊情况,也是直接判断
的特征值即可。
(默认需要检测的角点两个方向的实际梯度垂直或者近似垂直)
综上,可以根据 矩阵的两个特征值
大小相对关系,判断角点。
实际运算,图像中每个点所在局部窗口都有一个对应的 矩阵,如何衡量
大小? Harris 的作者提出了一种新方案,
角点响应值:
通过判断 来检测角点,
是一个很小的数,通常取值
。
如何看待角点响应值?
假设 是同一个大量级的数,设为
,则
,因为
是一个很小的数,此时的
也是一个很大的数,可以用来判断角点。
假设 是同一个小量级的数,设为
,同上
,接近于 0,可以用来判断平坦区域。
假设 一大一小,
,则
,其中
是一个极微小量,甚至如果
,该响应值还是负的,可以用来判断边缘。
步骤
1. RGB彩色图片转成灰度图;
2. 使用Sobel等梯度算子计算每一个点x,y两个方向上的梯度,如
3. 计算图像两个方向梯度的乘积 和
,为构建
矩阵做准备;
4. 对 和
做局部窗口的高斯滤波(或均值滤波),计算中心点为(x, y)的局部窗口W对应的矩阵M;
5. 对图像每一个点,构建 ,求Harris响应值
,参数
一般取 0.04 - 0.06;
6. 过滤响应值,响应值大于一定阈值的点保存, 保存作为角点。
保存作为角点。
7. 每个角点,统计局部特征,做后续的图像匹配等。
