ROS入门笔记(六):ROS系统架构
ROS入门笔记(六): ROS系统架构
1 ROS系统架构
1.1 文件系统(重点)
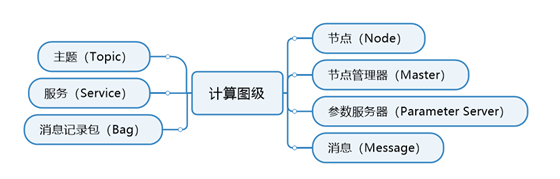
1.2 计算图
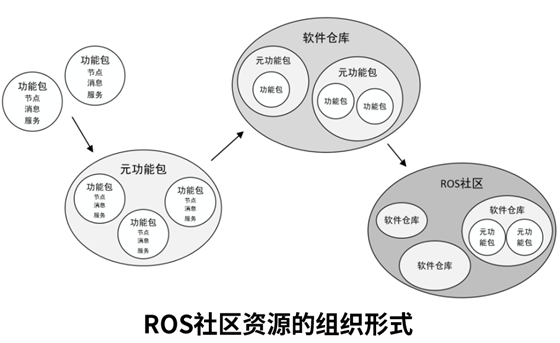
1.3 开源社区
1 ROS系统架构

1.1 文件系统(重点)
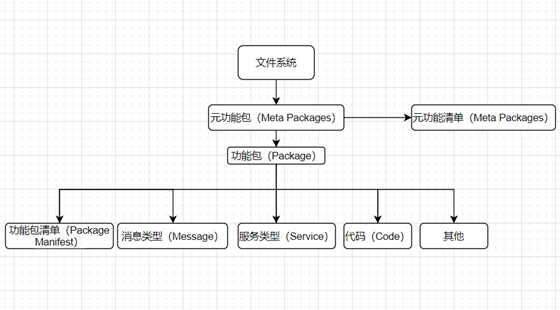
3)功能包(Package):功能包是ROS中软件组织的基本形式。一个功能包具有用于创建ROS程序的最小结构和最少内容。它可以包含ROS运行的进程(节点)、配置文件等;
6)服务类型(Service):服务类型定义了ROS服务器/客户端通信模型下的请求与应答数据类型,可以使用ROS系统提供的服务类型,也可以使用.srv文件在功能包的srv文件夹中进行定义。
1.2 计算图
计算图是ROS在点对点网络里整合并处理数据的过程。基本计算图概念是 节点, 主机, 参数服务器, 消息, 服务, 话题, 和 数据包,它们通过不同的方式提供数据给图层。
1)节点(Node)—节点是执行任务的进程,也称为软件模块。
注:在ROS中,最小的进程单元就是节点( node)。一个软件包里可以有多个可执行文件, 可执行文件在运行之后就成了一个进程(process), 这个进程在ROS中就叫做节点 。
2)节点管理器(ROS Master)—管理者角色,统筹管理节点,保证节点的正常运行。
注:当ROS程序启动时, 第一步首先启动master, 由节点管理器处理依次启动node 。
作用:
通过RPC提供登记列表及对其他计算图表的查找功能,帮助节点间互相查找,建立连接,进行点对点的通信
控制中心,提供参数服务器,管理全局参数
3)参数服务器(Parameter Server)—参数服务器是节点存储参数的地方、 用于配置参数, 全局共享参数。 参
数服务器使用互联网传输, 在节点管理器中运行, 实现整个通信过程。 参数服务器维护着一个数据字典, 字典里存储着各种参数和配置。
4)消息(Message)—消息在ROS中,是一种数据类型,节点之间通过消息来互相通信。消息类型有ROS标准类型和基于标准消息开发的自定义类型两种。
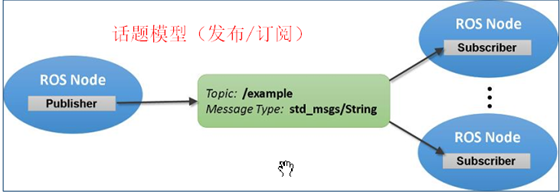
6)主题(Topic)—异步通信机制,传输消息(Message)
主题:指节点发布的消息的去处。节点可以发布消息到话题,也可以订阅话题以接收消息。当一个节点发送数据时,我们就说该节点正在向主题发布消息。节点可以通过订阅某个主题,接受来自其他节点的消息。
发布/订阅:多对多的传输方式
6)服务(Service)—同步通信机制,传输请求/应答数据,基于C/S模型
当你需要直接与节点通信并获得应答时,将无法通过主题实现,从而需要服务。此外,服务必须有唯一的名称。当一个节点提供某个服务时,所有的节点都可以通过使用ROS客户端编写的代码与它通信。
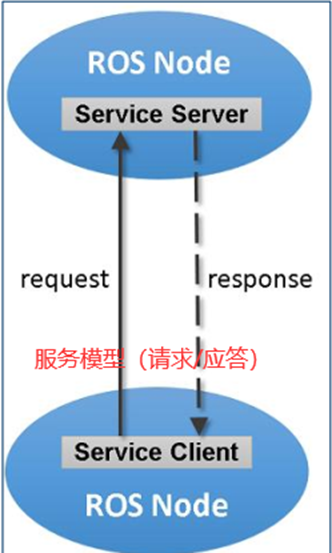
请求/应答:一对多的传输模式
7)消息记录包(bag)—是一种用于保存和回放ROS消息数据的文件格式。消息记录包是一种用于存储数据的重要机制,它可以帮助记录一些难以收集的传感器数据,然后通过反复回放数据进行算法的性能开发和测试。ROS创建的消息记录包文件以*.bag为扩展名,通过播放、停止、后退操作该文件,可以像实时会话一样在ROS中再现情景,便于算法的反复调试。
1.3 开源社区
ROS开源社区的概念主要是ROS资源,其能够通过独立的网络社区分享软件和知识。