
ROS中阶笔记(二):机器人系统设计—URDF机器人建模
ROS中阶笔记(二):机器人系统设计—URDF机器人建模
01 URDF理论
1.1 什么是URDF
- Unified Robot Description Format,统一机器人描述格式;
- ROS中一个非常重要的机器人模型描述格式;
- 可以解析URDF文件中使用XML格式描述的机器人模型;
- ROS同时也提供URDF文件的C++解析器(可以在C++代码中直接解析URDF机器人模型,好处:在基于模型的计算算法中,可以在代码中调用模型的信息,方便模型计算)
1.2 模型< robot >
官网:http://wiki.ros.org/urdf/XML/model
一个完整的机器人模型,由一系列< link >和< joint >组成
- 完整机器人模型的最顶层标签
- < link > 和 < joint >标签必须包含在 < robot > 标签内
<robot name="pr2">
<link> ... </link>
<link> ... </link>
<link> ... </link>
<joint> .... </joint>
<joint> .... </joint>
<joint> .... </joint>
</robot>

1.2.1 < link > element
官网:http://wiki.ros.org/urdf/XML/link
- 描述机器人某个刚体部分的外观和物理属性;
- 尺寸(size)、颜色(color)、形状(shape)、惯性矩阵(inertial matrix)、碰撞属性(collision properties)等。
<link name="my_link">
<inertial>
<origin xyz="0 0 0.5" rpy="0 0 0"/>
<mass value="1"/>
<inertia ixx="100" ixy="0" ixz="0" iyy="100" iyz="0" izz="100" />
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="1 1 1" />
</geometry>
<material name="Cyan">
<color rgba="0 1.0 1.0 1.0"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius="1" length="0.5"/>
</geometry>
</collision>
</link>

包括3个子标签
- < inertial >:描述link的惯性参数,主要用到机器人动力学的运算部分;
- < visual >:描述机器人link部分的外观参数, 尺寸、颜色、形状等的外观信息;
- < collision >:描述link的碰撞属性,
link还有一个比较关键的部分,就是坐标系
Link origin 是起始坐标,整个link创建的时候都是相对 Link origin坐标系创建的;
1.2.2 < joint > element
官网:http://wiki.ros.org/urdf/XML/joint
joint就是用来连接两个具体的link部分的;
- 描述机器人关节的运动学和动力学属性
- 包括关节运动的位置和速度限制
- 根据关节的运动形式,可以将其分为六种类型。
| 关节类型 | 描述 |
|---|---|
| continuous | 旋转关节,可以围绕单轴无限旋转 |
| revolute | 旋转关节,类似于continuous,但是有旋转的角度极限 |
| prismatic | 滑动关节,沿某一轴线移动的关节,带有位置极限 |
| planar | 平面关节,允许在平面正交方向上平移或者旋转 |
| floating | 浮动关节,允许进行平移、旋转运动 |
| fixed | 固定关节,不允许运动的特殊关节 |
<joint name="my_joint" type="floating">
<origin xyz="0 0 1" rpy="0 0 3.1416"/>
<parent link="link1"/>
<child link="link2"/>
<calibration rising="0.0"/>
<dynamics damping="0.0" friction="0.0"/>
<limit effort="30" velocity="1.0" lower="-2.2" upper="0.7" />
<safety_controller k_velocity="10" k_position="15" soft_lower_limit="-2.0" soft_upper_limit="0.5" />
</joint>
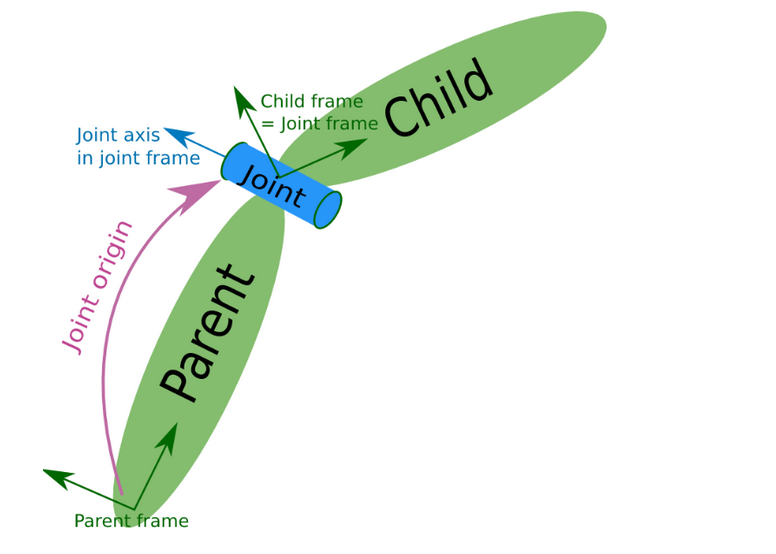
下面图中,蓝色关节表示出一个运动的轴,蓝色关节是可以围绕蓝色的轴旋转的,也就是child这个link是可以围绕joint上下旋转。
joint是连接两个link,需要分一个主次关系,主关节是parent link,子关节是child link, 在xml形式的描述中这个两个 link是必须存在的
子标签:
- < calibration >:关节的参考位置,用来校准关节的绝对位置;
- < dynamics >:描述关节的物理属性,例如阻尼值、物理静摩擦力等,经常在动力学仿真中用到;
- < limit >:描述运动的一些极限值,包括关节运动的上下限位置、速度限制、力矩限制等;
- < mimic >:描述该关节与已有关节的关系;
- <safety_controller>:描述安全控制器参数。保护机器人关节的运动
02 URDF 实践
2.1 创建机器人描述的功能包
第一步,进入工作空间中的src 功能包目录下,
$ cd ./catkin_ws/src/
第二步,创建一个机器人建模的功能包
$ catkin_create_pkg mbot_description urdf xacro
# 机器人模型、描述文件在ROS里,通常的以 机器人名_description
# 并且需要依赖urdf功能包,解析模型 和 xacro(优化urdf用的)依赖
第三步,在mbot_description功能包下创建几个不同作用的文件夹,如下图所示:
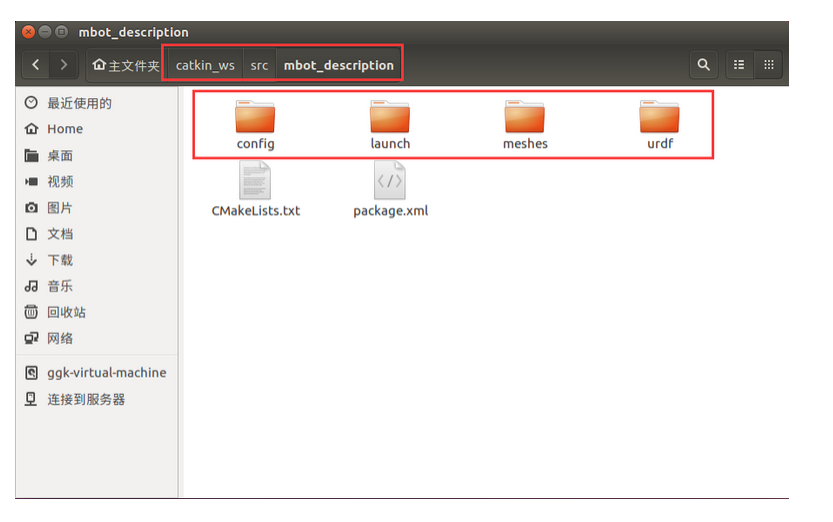
- urdf:存放机器人模型的URDF或xacro文件
- meshes:放置URDF中引用的模型渲染文件,机器人外观纹理,让外观和实际更相似,通过三维设计软件导出,放置此文件夹下
- launch:保存相关启动文件
- config:保存rviz的配置文件、功能包的配置文件
2.2 编辑launch启动文件
主要是加载urdf 并在rviz中显示
显示机器人模型,基本上修改第一行 urdf文件的路径,即可;
下面display_mbot _base_urdf.launch文件是在rviz中显示机器人的一种固定形态
<launch>
<!-- param是要加载ros的一个参数:robot_description (描述机器人的具体模型)-->
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_base.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
- joint_state_publisher:发布每个joint(除fixed类型)的状态,而且可以通过UI界面对joint进行控制
- robot_state_publisher:将机器人各个links、joints之间的关系,通过TF的形式,整理成三维姿态信息发布
2.3 配置config文件
在config文件夹下,创建.rviz 配置文件,保存。
2.4 创建URDF模型
在urdf文件夹下,创建.urdf文件,保存。
第一步:使用圆柱体创建一个车体模型
第二步:使用圆柱体创建左侧车轮
第三步:使用圆柱体创建右侧车轮
第四步:使用球体创建前后支撑轮
第五步:创建传感器——摄像头camera、激光雷达laser、Kinect;
关于Kinect,在meshes文件夹下,创建创建纹理描述文件
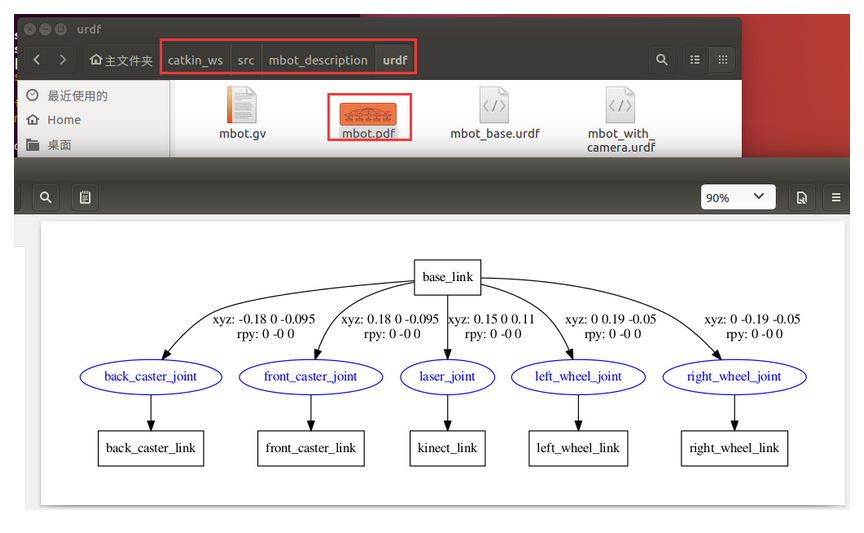
2.5 检查URDF模型整体结构
在urdf文件夹下,执行 urdf_to_graphiz+要检查的urdf文件
$ urdf_to_graphiz mbot_with_kinect.urdf
会在当前路径下创建一个pdf文件,把机器人所有的link和joint的关系分析出来;
2.6 启动launch文件
注意:在运行launch文件时,URDF文件中不能有中文注释,删除掉中文注释,否正会报错误;
$ roslaunch mbot_description display_mbot_base_urdf.launch
问题一:启动错误
[ERROR] [1589109861.881993]: Could not find the GUI, install the 'joint_state_publisher_gui' package
$ sudo apt-get install ros-kinetic-joint-state-publisher-gui
问题二:警告
这时候可能还会存在一个警告,如果有的话把launch文件中的joint_state_publisher用joint_state_publisher_gui全部替换掉,即可。
2.7 URDF建模存在的问题
- 模型冗长,重复内容过多
- 参数修改麻烦,不便于二次开发
- 没有参数计算功能
03 参考资料
官方教程:http://wiki.ros.org/cn/urdf

 浙公网安备 33010602011771号
浙公网安备 33010602011771号