常见数组的排序算法的特点
假设这些排序算法想得到一个升序序列,长度为n。
参考
https://blog.csdn.net/qq_53414724/article/details/125016223
https://zhuanlan.zhihu.com/p/602971700
https://visualgo.net/zh/sorting
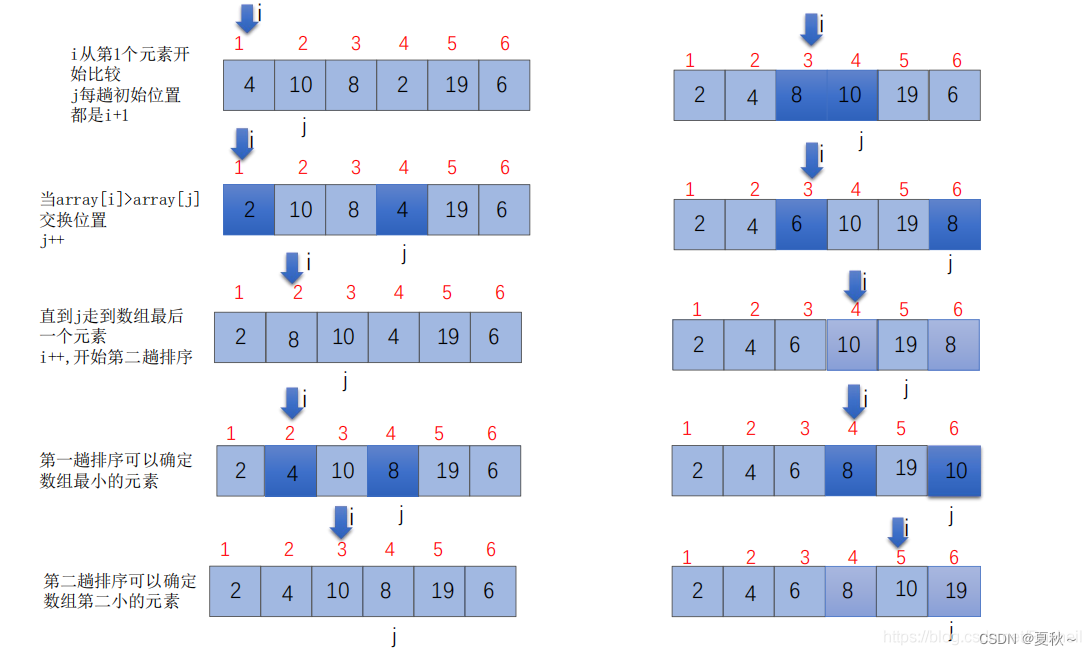
冒泡排序
冒泡排序从头开始寻找相邻的元素,找到较大的元素放于后面,一直到数组末尾。循环n-1轮,每一轮都从0开始,但结束位置越来越靠近起始位置,第一轮明确最大的元素,第二轮明确第二大的元素,...。代码中i、j指针总是挨着的,满足j=i+1。冒泡排序算法稳定,平均、最差时间复杂度都是O(n^2),最优时间复杂度为O(n),空间复杂度为O(1)。
选择排序
将数组分为两部分:有序部分和无序部分。每次从无序部分中选取最小的元素,然后将其放入有序部分中,初始默认Arr[0]为有序部分,Arr[1]~Arr[n-1]皆是无序部分。共循环n-1轮,每一轮明确无序部分中最小的元素、与无序部分的第一个位置元素交换。代码中i、j指针不是挨着的,i指针指向数组无序部分的第一个位置元素,j指针遍历整个无序部分,如果碰到arr[j] < arr[i],就立刻进行数值交换,因此每一轮中可能i、j指针指向的值交换多次。选择排序算法不稳定,平均、最好、最差时间复杂度都是O(n^2),空间复杂度为O(1)。
选择排序2
选择排序还有一种实现途径,原理十分相似。它同样循环n-1轮,但是每一轮中只进行一次交换。j不断遍历寻找无序部分最小值,用i指针动态指向最小值位置,当前轮结束后,对Arr[i]与Arr无序部分的第一个位置元素交换。

插入排序
思路也是将数组分为有序部分和无序部分,初始默认Arr[0]为有序部分,Arr[1]Arr[n-1]皆是无序部分。<b>每次将无序部分第一个元素Arr[j]插入到有序部分中的合适位置</b>,这里可能涉及到多次值对比和交换,并将Arr[j]从后往前对比大小(Arr[j-1]Arr[1])。插入排序算法稳定,平均、最差时间复杂度都是O(n^2),最优时间复杂度为O(n),空间复杂度为O(1)。在数组序列宏观大致上有序、局部乱序时效率较高,尤其是输入数组本来就有序时,只进行多次数值比较、不用进行数值交换,效率最高得到O(n)的最优时间复杂度。

希尔排序
利用了多次插入排序,目的是在数组元素很多时,缩短插入排序的时间(插入排序平均时间复杂度O(n^2))。首先选择一个增量递减序列\(d_1\)、\(d_2\)、…、\(d_k\),其中\(d_i\)一直递减,直到\(d_k = 1\),则要进行k次希尔排序,先粗略排序,然后原来越精细排序,一般\(d_{i+1}=\frac{d_{i}}{2}\)向下取整。每一次排序中,数组被分为\(d_i\)个子序列,每个子序列中每组相邻元素都间隔\(d_i\)。如下图:
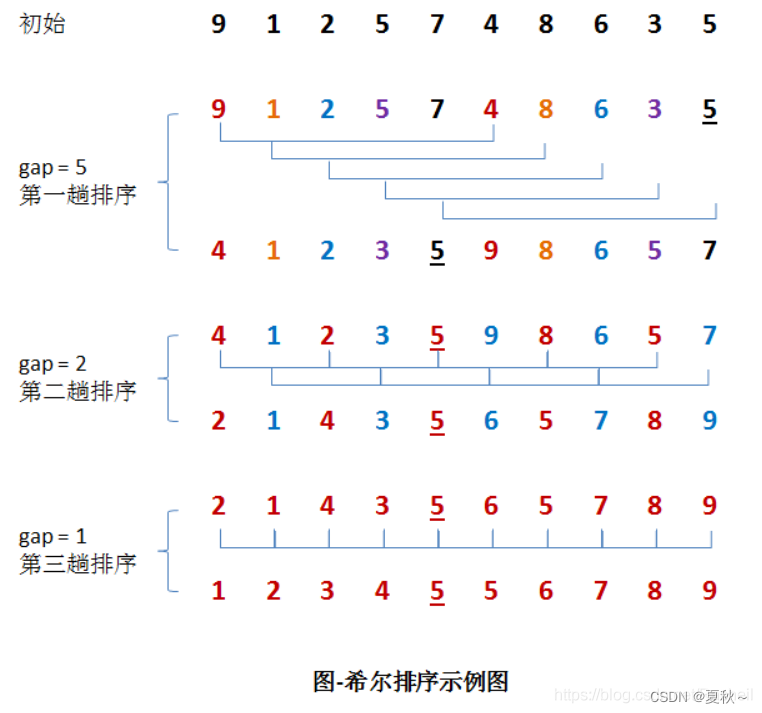
希尔排序算法不稳定,平均时间复杂度为\(O(nlogn)\),最好时间复杂度为\(O(n^{1.3})\),最坏时间复杂度为\(O(n^2)\),空间复杂度为\(O(1)\)。
归并排序
把待排序列递归的分为长度相等的两个子序列,直到分解为1个子序列中包含1个元素为止。递归的将每两个子序列合并为一个有序子序列。最终合并的序列即为有序序列。归并排序算法稳定,平均时间复杂度为O(nlogn),最好时间复杂度为O(nlogn),最坏时间复杂度为O(nlogn),空间复杂度为O(n)。

快速排序
从数列中挑出一个元素,称为"基准"(pivot)。重新排序数列,所有比基准值小的元素摆放在基准前面,所有比基准值大的元素摆在基准后面(相同的数可以到任一边)。在这个分区结束之后,该基准就处于数列的中间位置。递归地把小于基准值元素的子数列和大于基准值元素的子数列排序。快速排序算法稳定,平均时间复杂度为O(nlogn),最好时间复杂度为O(nlogn),最坏时间复杂度为O(n^2),空间复杂度为O(logn)~O(n)。
- 最好时间复杂度:当每次划分时,算法若都能分成两个等长的子序列时,分治算法效率达到最大
- 最坏时间复杂度:待排序列有序时,相当于冒泡排序,递归实现会出现栈溢出的现象,时间复杂度为O(N^2)
- 最好空间复杂度:每次都把待排序列分为相等的两部分,2^x=n (分割x次,保存x个par) ,x = logn
- 最坏空间复杂度:1 2 3 4 5 6 7 N个数据就保存N个par。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号