
相机及其选型
一、相机基础
1.从机器视觉项目中视场成像传输过程:
镜头---->红外滤光片(IR Filter)---->滤色片---->图像传感器/感光芯片(CCD/CMOS)---->驱动电路---->数字图像处理模块(DSP)---->传输控制单元(受计算机信号控制,传出视频信号)---->计算机
红外滤光片作用:感光芯片对红外线敏感,因此需要滤掉来避免图像过亮及颜色变化。阻挡红外线穿过影响CCD正常成像,同时增强其他光的透射,可以使CCD对于可见光的响应更稳定均衡。但是红外滤光片的加入会使相机夜间失去夜视功能,因此出现了双滤光片做法。
滤光片:不让某种颜色通过。因为所有的滤光片都会吸收某些波长,从而使物体变得更暗。
辐射--激发电子---闭合电路产生电压---放大电路----数字信号
2.感光芯片---相机传感器
CCD芯片大小:一般是边长在0.5cm-1cm左右。传感器尺寸越大,单个感光元件间距大,相互间的信号干扰小,对噪点控制能力强。
CCD感光-光电效应:光子辐射到image sensor上造成原子跃迁,释放能量--自由电子,sensor的电荷存储器能存储光子,再释放形成电流,sensor对电流产生响应,响应最终离散编码成数字形式,就得到了像素值。
图像乳化现象:由于曝光过度,导致激发电子溢出溢出本像素位置到邻接像素,致使区域成像变亮;且明亮的被摄物像昏暗的被摄物扩展。
图像乳化容易发生在CCD传感器上,CMOS就不会,从2015年开始cmos已经取得大发展追上ccd,性价比高,性能也不错。
3.相机成像过程:
模拟信号--A/D---转换器-->数字信号---DSP(数字信号处理器,图像处理器)---数字图像-----再经压缩存储到介质中
模拟信号:电子波激发CMOS感光元件产生电子,CMOS收集形成电流。
DSP--图像处理器:将数字信号解码还原成image显示。
4.图像压缩的原理:
图像存在冗余信息,如时间冗余(多帧相似),空间冗余(背景有成片相同区域,可以降维编码表示)及视觉冗余(人眼识别上限24灰阶)等,因此可以压缩编码。
6.工业相机分类:
5.1.按感光芯片感光机理分:
CCD相机
CMOS相机
5.2.按颜色分:
彩色相机:原理:感光芯片上交叉存在着不同的感光元件,然后通过不同区域覆盖不同的滤色片,不同区域只得到一个真正的CCD的像素值如R通道,但是另外两个值(G和B)是插值得到的。
滤色片:只让某种色彩通过。
单色相机:仅采集亮度信号,不需要滤色片。因此黑白相机对弱光下的灵敏度更好。
5.3.按图像传感器(感光芯片)类型分:
面扫描相机:传感器上像素“面状”分布,成像为二维面图像。
线扫描相机:像素“线状”分布,成像也是二维图像,只是高度比较小,宽度很大。特点:分辨率高适合测量场景,价格高。以CCD为主。
面阵CCD民用数码照相机和摄象机;线阵CCD用在工业或者军用领域,常见的就是扫描仪。
5.4.按输出信号分:
模拟信号相机:直接输出模拟信号。 AD转换要到相机外的图像采集卡完成。
优点:传输距离长。缺点:对传输过程的噪声和干扰敏感,分辨率低。
数字信号相机:相机内完成了模数转换,相机输出的是数字信号。
优点:分辨率高。缺点:传输距离近,价格高。
7.工业相机的发展趋势:
1.CMOS取代CCD
2.数字相机取代模拟相机
3.cameralink接口流行
4.Firewire接口采集卡流行
5.专业的工业相机出现。
8.像素密度ppi与输出分辨率dpi
ppi:pixel per inch,指成像的像素密度,感光芯片那环节的。
DPI:dots per inch,针对输出设备的,输出分辨率(日常生活中其实是指这个)比如我们去洗照片,那么这个DPI实际是由ppi和相片尺寸共同决定的。
比如我们多大的目标,算法可以处理:就可以用DPI衡量。
9.图像采集模式:
同步触发采集:采集完整一帧,才能进行下一帧。因此对场景的同步时间间隔最小是一帧的时间。摄像机的传输图像速度按固定帧率,和触发无关------PCB板项目就这样,自主采集,一直匹配。
异步触发采集:有物体过来,触发给相机信号采集图像。--------最常用。可以采集到一行就抛弃当前帧的剩余内容,继续下一帧采集。因此同步时间间隔最小减少到扫描一行的时间。
触发同时会给相机拍照及重启两个信号。
10.彩色相机机理:
由于CCD/CMOS对整个波段都有响应,因此无法产生彩色图像。给其覆盖彩色滤镜阵列如Bayer,每个区域仅能通过红绿蓝的一种。
人眼对绿色最敏感,因此把绿色区域倍增。但是这样会导致图像失真,因此少采样的部分再予以差值重建。
为什么会有隔行扫描相机?
老式电视机,帧率大概在25左右,帧率上不来闪烁感强,只能变成隔行(偶数行)扫描显示一次,再(奇数行)扫描显示,这样原本25fps就能提高到50fps,缺点清晰度差,依然有轻微闪烁感。
多数相机的图像传感器支持局部扫描:即只输出传感器的一部分区域。通过局部扫描(部分行数)可以获得更高的帧率。
二、相机选型
1.色彩类型:黑白or彩色?
黑白相机:亮度数据
优点:
1.准确度高于彩色相机:非常适合尺寸测量场景
2.边缘检测场景:一般彩色图片依然要转为灰度图处理,且丢失精度。适合使用黑白相机
3.黑白相机处理时间更快,软件上省略彩转黑,系统整体响应时间更短
彩色相机:颜色数据
优势:适用于可以用颜色作为检测区别信息的场景。
价格:接近
2.测量精度:最小可检测尺寸L
成像中,目标最低占44 = 16像素,显然这种并不好,因此可能需要更高如66 = 36像素
那么根据 6 / (CCD一边像素数目) = L/ 视场边长
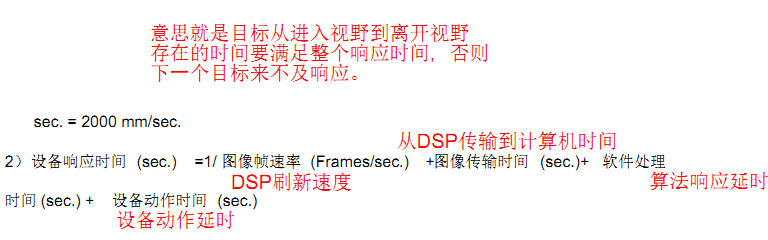
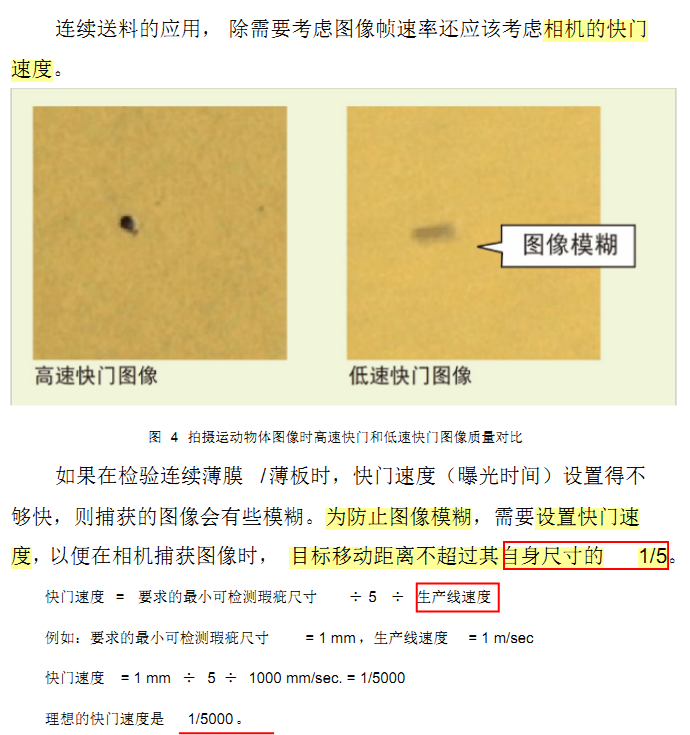
3.帧速率及快门速度:运动工件在线检测
帧速率:DSP刷新速度

4.数据传输方式(相机--计算机接口)
大于800M:CameraLink,最长10m传输距离,高速 高分辨率
大于400M:Firewire,即IEEE1394,支持热插拔等,一些PC自带接口,省了购买图像采集卡费用
USB接口:没有标准协议,CPU占用高,带宽没保证能达到480M--5G。
5.CCD or CMOS
大部分领域被CMOS占领:高读出速度(电路结构不同,CMOS可以直输出某个像素位点的电位(再AD转换成数字信号)),高性价比
CMOS因此可以很容易的读取矩形感兴趣区域--AOI,相比CCD优势明显。CCD只能整帧读到再抛弃一部分,帧率就慢了。
CMOS还可以并行模数转换,因此即使不使用AOI也比CCD快。另外还可以给每个像素集成模数转换元电路------DPS(数字像素传感器)
CCD强势场景:1.近红外成像 2.高速低照明

 浙公网安备 33010602011771号
浙公网安备 33010602011771号