


[转]OpenCV中ORB特征点检测和匹配简单用法
cmakelists:
cmake_minimum_required(VERSION 3.7)
project(feature_extraction_robin)
set(CMAKE_CXX_STANDARD 11)
find_package(OpenCV REQUIRED)
include_directories(${OPenCV_DIRS})
set(SOURCE_FILES main.cpp)
add_executable(feature_extraction_robin ${SOURCE_FILES})
target_link_libraries(feature_extraction_robin ${OpenCV_LIBS})
程序:
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
int main(int argc, char** argv)
{
if(argc!=3)//判断命令行输入对错
{
cout<<"usage: feature_extraction img1 img2"<<endl;
return 1;
}
//读取要匹配的两张图像
Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR);
Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR);
//初始化
//首先创建两个关键点数组,用于存放两张图像的关键点,数组元素是KeyPoint类型
std::vector<KeyPoint> keypoints_1, keypoints_2;
//创建两张图像的描述子,类型是Mat类型
Mat descriptors_1, descriptors_2;
//创建一个ORB类型指针orb,ORB类是继承自Feature2D类
//class CV_EXPORTS_W ORB : public Feature2D
//这里看一下create()源码:参数较多,不介绍。
//creat()方法所有参数都有默认值,返回static Ptr<ORB>类型。
/*
CV_WRAP static Ptr<ORB> create(int nfeatures=500,
float scaleFactor=1.2f,
int nlevels=8,
int edgeThreshold=31,
int firstLevel=0,
int WTA_K=2,
int scoreType=ORB::HARRIS_SCORE,
int patchSize=31,
int fastThreshold=20);
*/
//所以这里的语句就是创建一个Ptr<ORB>类型的orb,用于接收ORB类中create()函数的返回值
Ptr<ORB> orb = ORB::create();
//第一步:检测Oriented FAST角点位置.
//detect是Feature2D中的方法,orb是子类指针,可以调用
//看一下detect()方法的原型参数:需要检测的图像,关键点数组,第三个参数为默认值
/*
CV_WRAP virtual void detect( InputArray image,
CV_OUT std::vector<KeyPoint>& keypoints,
InputArray mask=noArray() );
*/
orb->detect(img_1, keypoints_1);
orb->detect(img_2, keypoints_2);
//第二步:根据角点位置计算BRIEF描述子
//compute是Feature2D中的方法,orb是子类指针,可以调用
//看一下compute()原型参数:图像,图像的关键点数组,Mat类型的描述子
/*
CV_WRAP virtual void compute( InputArray image,
CV_OUT CV_IN_OUT std::vector<KeyPoint>& keypoints,
OutputArray descriptors );
*/
orb->compute(img_1, keypoints_1, descriptors_1);
orb->compute(img_2, keypoints_2, descriptors_2);
//定义输出检测特征点的图片。
Mat outimg1;
//drawKeypoints()函数原型参数:原图,原图关键点,带有关键点的输出图像,后面两个为默认值
/*
CV_EXPORTS_W void drawKeypoints( InputArray image,
const std::vector<KeyPoint>& keypoints,
InputOutputArray outImage,
const Scalar& color=Scalar::all(-1),
int flags=DrawMatchesFlags::DEFAULT );
*/
//注意看,这里并没有用到描述子,描述子的作用是用于后面的关键点筛选。
drawKeypoints(img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("ORB特征点",outimg1);
//第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
//创建一个匹配点数组,用于承接匹配出的DMatch,其实叫match_points_array更为贴切。matches类型为数组,元素类型为DMatch
vector<DMatch> matches;
//创建一个BFMatcher匹配器,BFMatcher类构造函数如下:两个参数都有默认值,但是第一个距离类型下面使用的并不是默认值,而是汉明距离
//CV_WRAP BFMatcher( int normType=NORM_L2, bool crossCheck=false );
BFMatcher matcher (NORM_HAMMING);
//调用matcher的match方法进行匹配,这里用到了描述子,没有用关键点。
//匹配出来的结果写入上方定义的matches[]数组中
matcher.match(descriptors_1, descriptors_2, matches);
//第四步:遍历matches[]数组,找出匹配点的最大距离和最小距离,用于后面的匹配点筛选。
//这里的距离是上方求出的汉明距离数组,汉明距离表征了两个匹配的相似程度,所以也就找出了最相似和最不相似的两组点之间的距离。
double min_dist=0, max_dist=0;//定义距离
for (int i = 0; i < descriptors_1.rows; ++i)//遍历
{
double dist = matches[i].distance;
if(dist<min_dist) min_dist = dist;
if(dist>max_dist) max_dist = dist;
}
printf("Max dist: %f\n", max_dist);
printf("Min dist: %f\n", min_dist);
//第五步:根据最小距离,对匹配点进行筛选,
//当描述自之间的距离大于两倍的min_dist,即认为匹配有误,舍弃掉。
//但是有时最小距离非常小,比如趋近于0了,所以这样就会导致min_dist到2*min_dist之间没有几个匹配。
// 所以,在2*min_dist小于30的时候,就取30当上限值,小于30即可,不用2*min_dist这个值了
std::vector<DMatch> good_matches;
for (int j = 0; j < descriptors_1.rows; ++j)
{
if (matches[j].distance <= max(2*min_dist, 30.0))
good_matches.push_back(matches[j]);
}
//第六步:绘制匹配结果
Mat img_match;//所有匹配点图
//这里看一下drawMatches()原型参数,简单用法就是:图1,图1关键点,图2,图2关键点,匹配数组,承接图像,后面的有默认值
/*
CV_EXPORTS_W void drawMatches( InputArray img1,
const std::vector<KeyPoint>& keypoints1,
InputArray img2,
const std::vector<KeyPoint>& keypoints2,
const std::vector<DMatch>& matches1to2,
InputOutputArray outImg,
const Scalar& matchColor=Scalar::all(-1),
const Scalar& singlePointColor=Scalar::all(-1),
const std::vector<char>& matchesMask=std::vector<char>(),
int flags=DrawMatchesFlags::DEFAULT );
*/
drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_match);
imshow("所有匹配点对", img_match);
Mat img_goodmatch;//筛选后的匹配点图
drawMatches(img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch);
imshow("筛选后的匹配点对", img_goodmatch);
waitKey(0);
return 0;
}

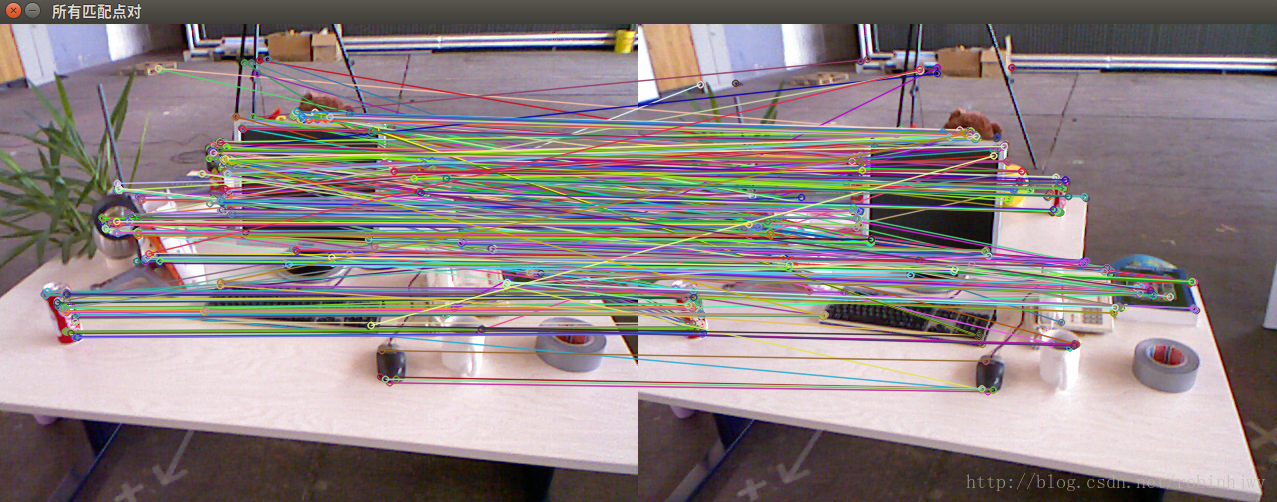
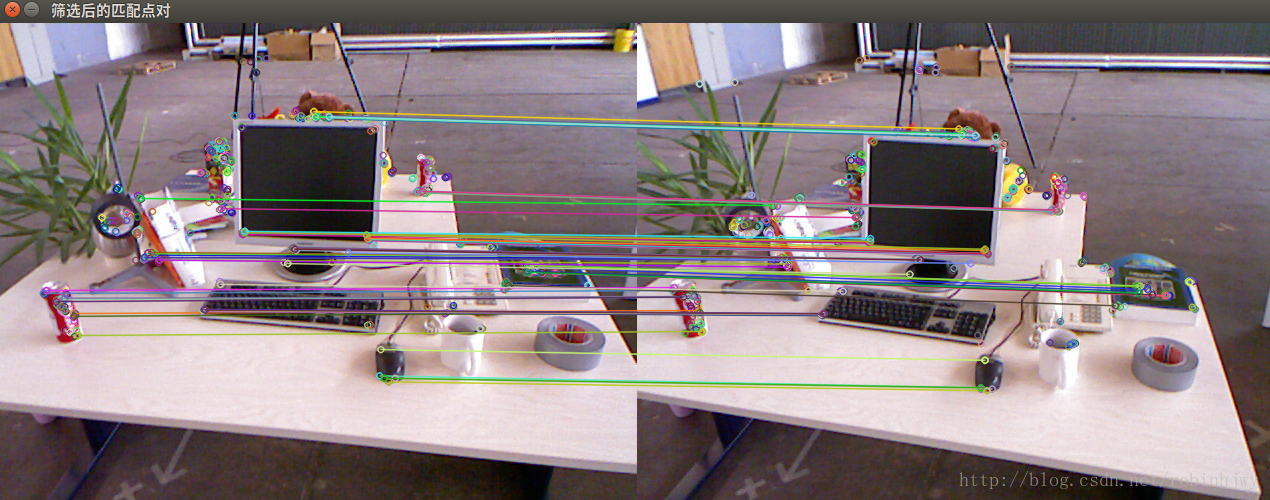
从匹配结果看,筛选后的效果要好很多。
这里再来回顾一下程序结构:
两张图:
1、detect出keypoints, compute出descriptors。
2、利用drawKeypoints()方法和keypoints绘制出特征点图。
3、利用matcher.match()方法和descriptors进行匹配结果存于matches。
4、利用drawMatches()方法和matches绘制匹配图。
5、对matches进行筛选得good_matches,再绘制一张筛选后的匹配图。
可以看出,关键点和keypoints有关;而匹配主要的是跟descriptors有关。

