负反馈 —— 拉扎维 第二版第八章笔记
反馈简介
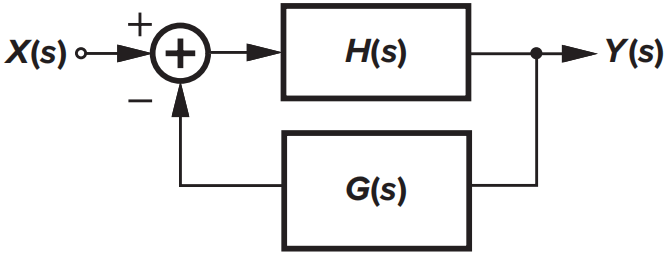
上图是反馈系统的一般表示方式。其中\(H(s)\)叫做前馈网络,\(G(s)\)叫做反馈网络。\(H(s)\)的输入信号为\(X(s)-G(s)Y(s)\)叫做反馈误差。一个设计良好的反馈系统中,反馈误差应该应该接近于零,从而使输出\(Y(s)\)为输入\(X(s)\)的精确比例复制。
由于反馈误差接近于零,因此在前馈网络\(H(s)\)的输入端可以认为是虚地
\(Y(s)/X(s)\)叫做闭环传递函数,\(H(s)\)叫做开环传递函数。因此该系统的闭环传递函数可以写作:
图片中可以认识到反馈系统的四个部分:
- 前馈放大器;
- 检测输出的方式;
- 反馈网络;
- 产生反馈误差的方式,既减(加)法器。
| 例子 | 描述 |
|---|---|
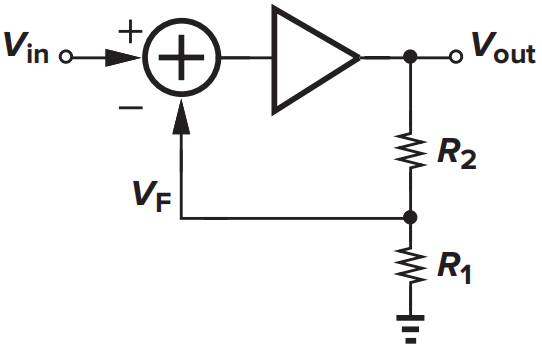 |
输出端又两电阻分压,再反馈回输入,属于电压反馈 |
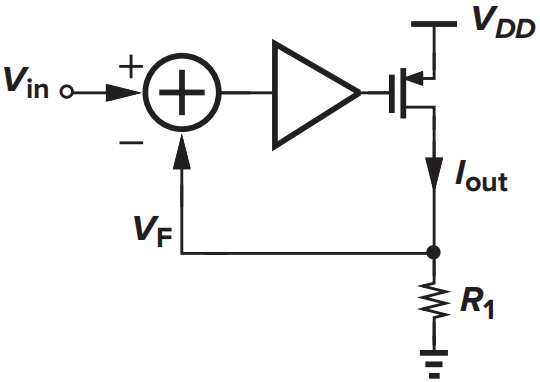 |
输出信号为电流,通过检测串联小电阻\(R_1\)的压降来检测电流,并反馈会输入,属于电流反馈 |
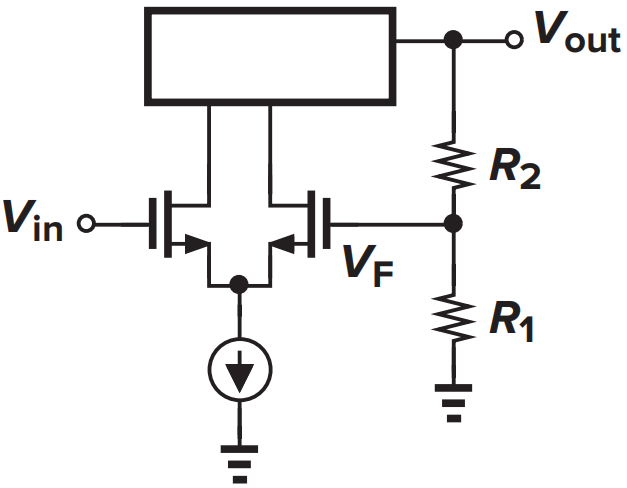 |
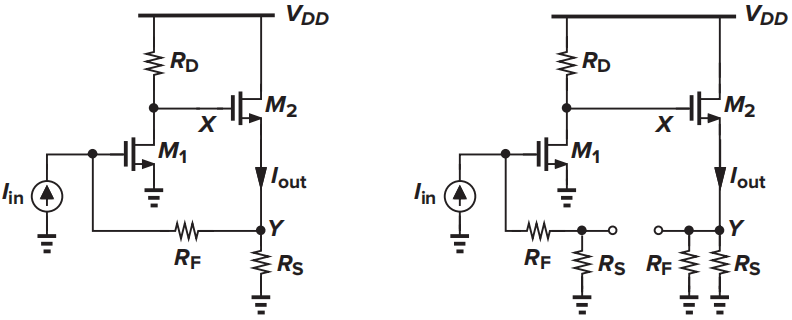
输出端通过分压形成反馈电压,属于电压反馈;差分对可以对电压做差,来产生反馈误差。 |
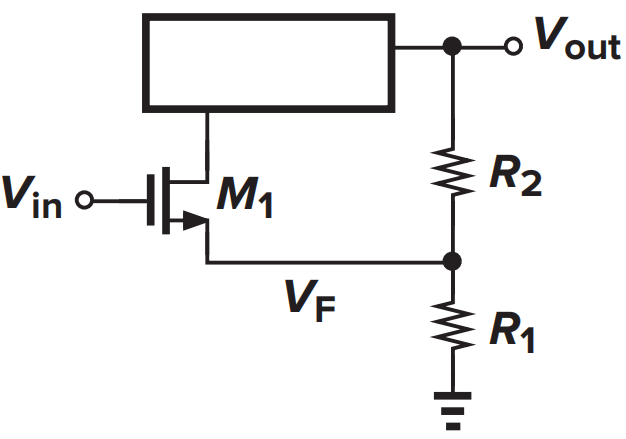 |
输出端通过分压形成反馈电压,属于电压反馈;反馈的电压\(V_F\)接在输入管源极,由于电流\(I_D\)是\(V_{in}-V_F\)的函数,因此是通过对电压做差来产生反馈误差。 |
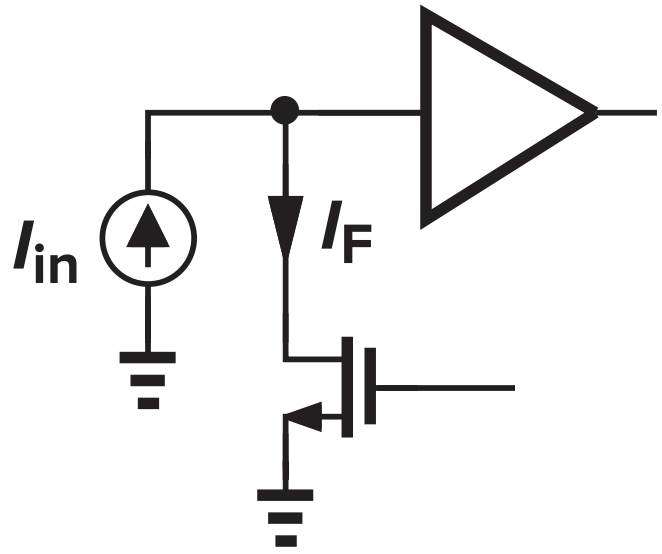 |
反馈到输入的信号与输入端口处于同一节点时,可以实现电流减法。 |
反馈信号与输入信号的关系:电压相减形式获得反馈误差时,输入信号和反馈信号应处于两个不同节点;电流相减形式获得反馈误差时,输入信号和反馈信号应处于同一节点。
反馈的优势
- 降低开环系统的增益灵敏度。开环系统的增益会被很多因素影响,例如工艺、温度、偏置、电源等;但使用负反馈会大大降低其他因素对增益的影响,从而提供一个稳定增益;
- 终端阻抗变化。负反馈可以改变输入/输出端口的阻抗,可将相应端口阻抗变化为原来的\(1/(LP+1)\)倍或\((1+LP)\)倍,其中\(LP\)为系统环路增益。
- 带宽变化。3dB带宽可以增加\((1+LP)\)倍,但增益带宽积不变,由于增益减小了\((1+LP)\)倍。
- 降低非线性。
反馈结构
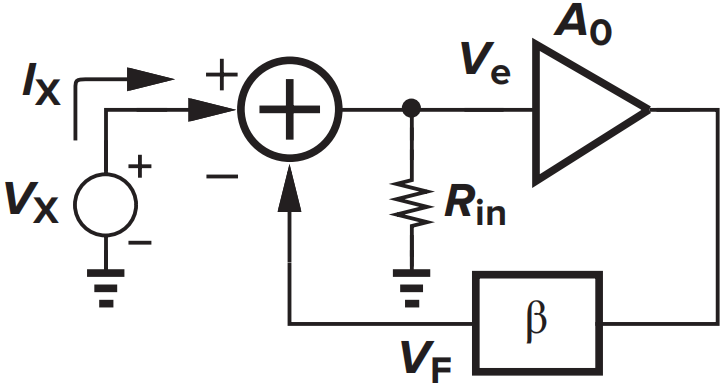
电压-电压反馈
- 闭环增益:
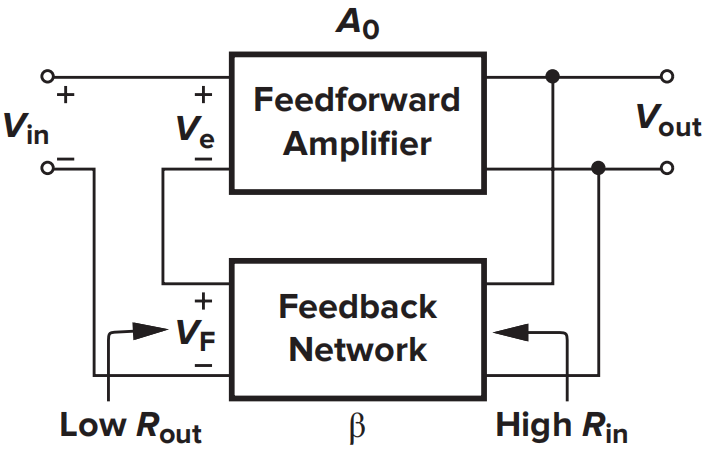
由图中可以得到\(V_F=\beta V_{out}\),\(V_e=V_{in}-V_F\),\(V_{out}=A_0V_e\),因此
其中,环路增益\(LP\)为\(\beta A_0\),可以看出总的增益减小到原来的\((1+LP)^{-1}\)倍。
- 输出电阻:
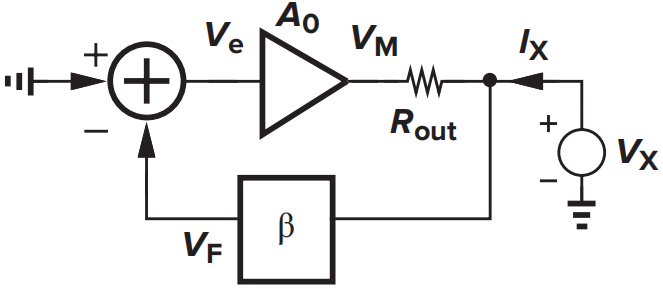
上图为计算输出电阻的等效图,输入信号被置零。\(R_{out}\)代表前馈放大器的输出阻抗。由图可得\(V_F=\beta V_X\),\(V_e=-\beta V_X\),\(V_M=-\beta A_0V_X\),并且电流可以表示为\(I_X=[V_X-(-\beta A_0V_X)]/R_{out}\),则有
可以看出输出电阻减小为原来的\((1+LP)^{-1}\)倍,使系统接近于理想电压源。
- 输入电阻:
上图为计算输入电阻的等效图。\(R_{in}\)代表前馈放大器的输入阻抗。由图得\(V_e=I_XR_{in}=V_X-V_F\),\(V_F=\beta A_0V_e\),则有
可以看出输入电阻增加为原来的\((1+LP)\)倍,使电路接近于理想电压放大器。
电流-电压反馈
- 闭环增益:
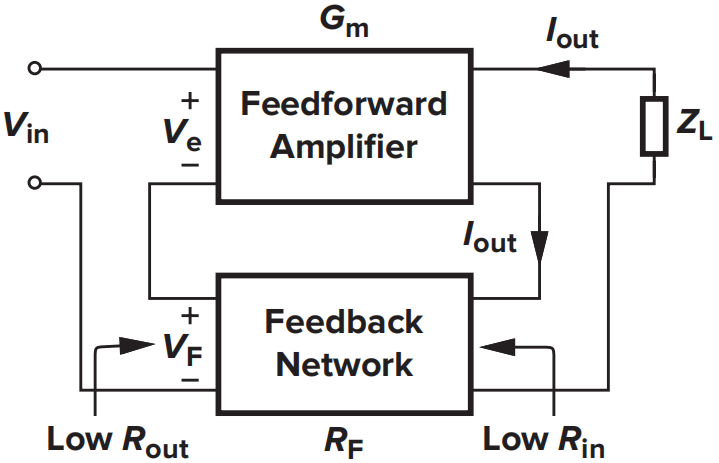
闭环增益为
闭环增益表现为跨导,跨导减小为原来的\((1+LP)^{-1}\)倍。
- 输出电阻:
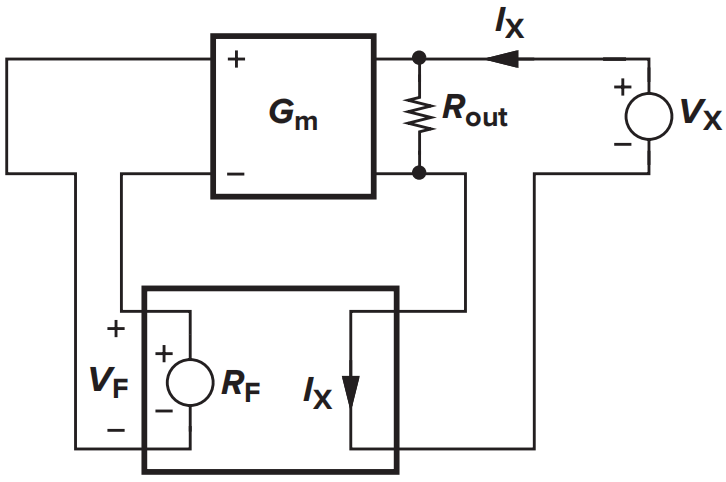
输出电阻为
输出电阻增大为原来的\((1+LP)\)倍。
- 输入电阻:
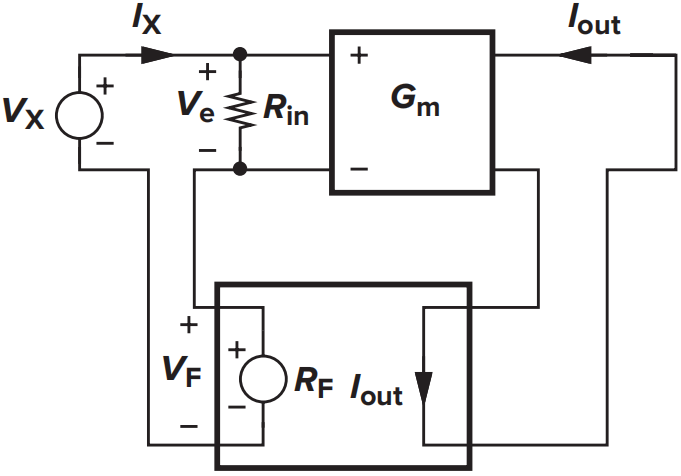
输入电阻为
输入电阻增加为原来的\((1+LP)\)倍
电压-电流反馈
- 闭环增益:
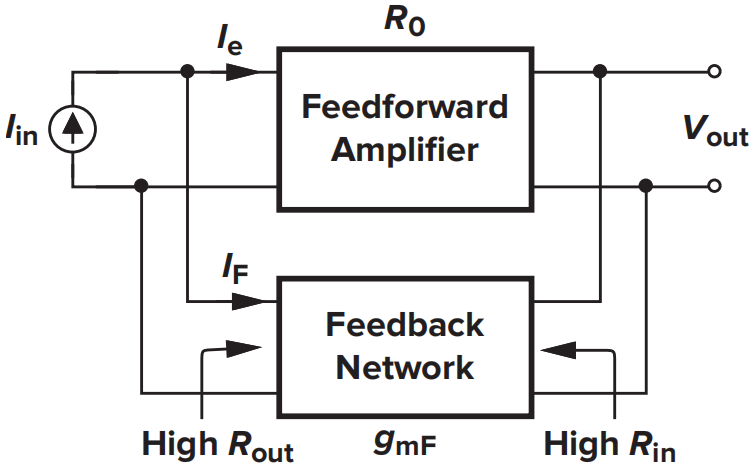
闭环增益为
闭环增益表现为阻抗,阻抗减小为原来的\((1+LP)^{-1}\)倍。
- 输出电阻:
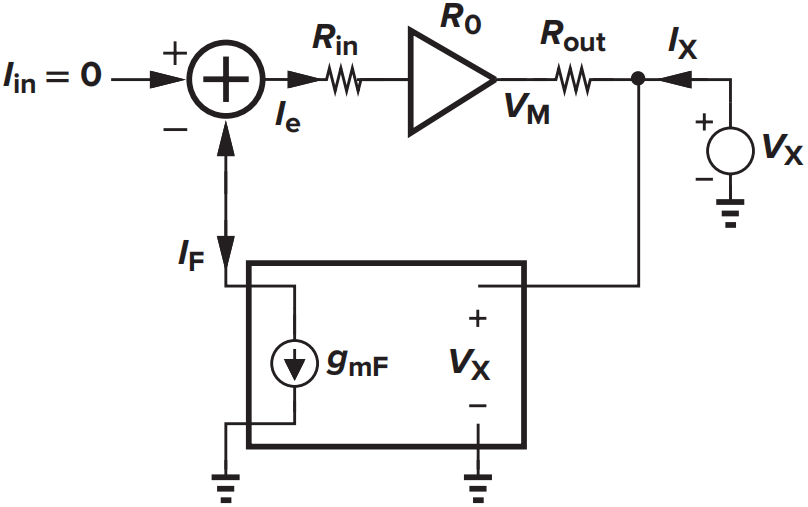
输出电阻为
输出电阻减小为原来的\((1+LP)^{-1}\)倍。
- 输入电阻:
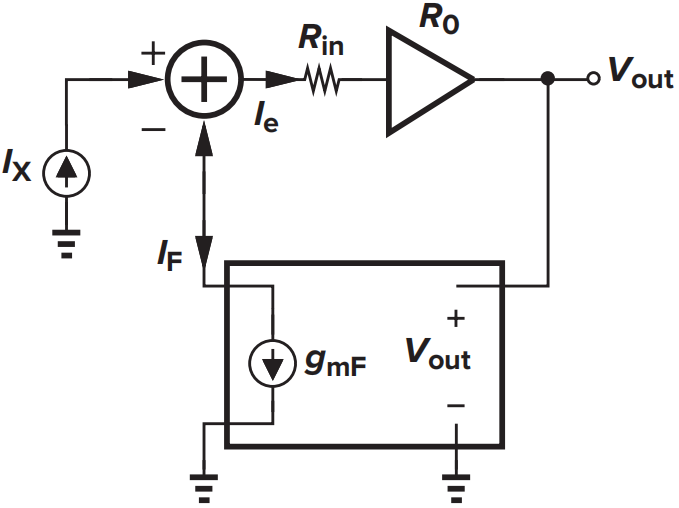
输入电阻为
输入电阻减小为原来的\((1+LP)^{-1}\)倍。
电流-电流反馈
- 闭环增益:
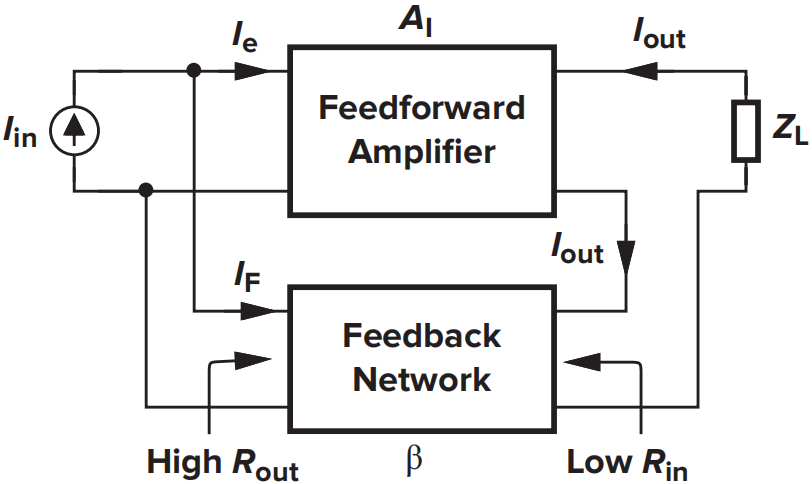
闭环增益为
- 输出电阻:
输出电阻增加为原来的\((1+LP)\)倍
- 输入电阻:
输入电阻减小为原来的\((1+LP)^{-1}\)倍。
反馈对噪声的影响
在四种反馈类型中,如果反馈网络不引入噪声,则输入参考噪声电压和电流均保持不变。实际上,反馈网络本身包含有电阻和MOS管,会使总的噪声性能变差。
加载效应
实际上反馈网络的非理想效应会使得前馈网络的传递函数发生变化,从而改变最终的闭环增益。因此我们需要将加载效应的影响等效进电路之中。
电压-电压反馈
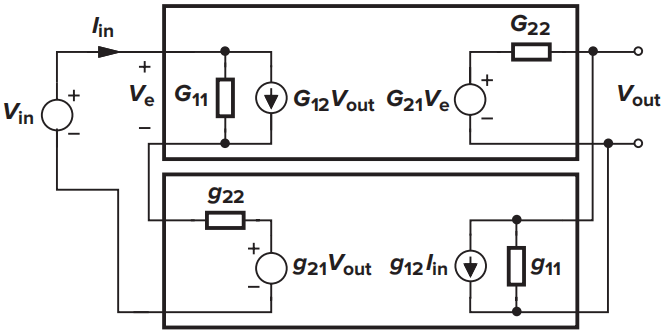
电压-电压反馈使用G模型来表示,其中\(G_{11}\)表示前馈网络输入导纳\((Z_{in})^{-1}\),\(G_{22}\)表示前馈网络输出阻抗\(Z_{out}\),\(G_{21}\)表示前馈网络的电压增益\(A_0\),\(G_{12}\)表示前馈网络的内部反馈;\(g_{11}\)表示反馈网络的输入导纳,\(g_{22}\)表示反馈网络的输出阻抗,\(g_{21}\)表示反馈网络的反馈系数\(\beta\),\(g_{12}\)表示反馈网络的内部反馈。
为了方便求出该电路,首先将所有环路“单向化”,既去掉前馈网络和反馈网络的内部反馈,令\(G_{12}=g_{12}=0\)。在输入环路使用KVL,在输出节点使用KCL。
求得闭环增益,并表示为熟悉的形式\(A_{v,open}/(1+\beta{A_{v,open}})\):
则开环增益和反馈系数可以表示为:
可以看出,开环增益缩小了\([(1+{g_{22}\over{Z_{in}}})(1+g_{11}Z_{out})]^{-1}\)倍,相当于\(A_0\)乘以系数\({Z_{in}/(Z_{in}+g_{22})}\)和\(g_{11}^{-1}/(g_{11}^{-1}+Z_{out})\),可以发现两系数表现为分压器的形式,因此加载效应可以体现为以下形式:
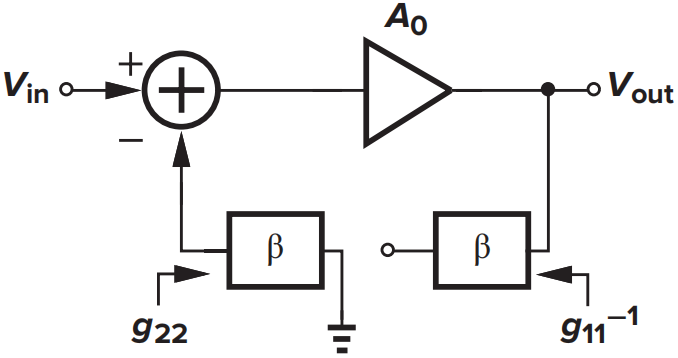
其中,\(g_{11}\)可以通过反馈网络输出开路得到,\(g_{22}\)可以通过反馈网络输入短路得到。
- 电路示例:
 |
 |
|---|---|
| 原电路 | 考虑加载效应的开环电路 |
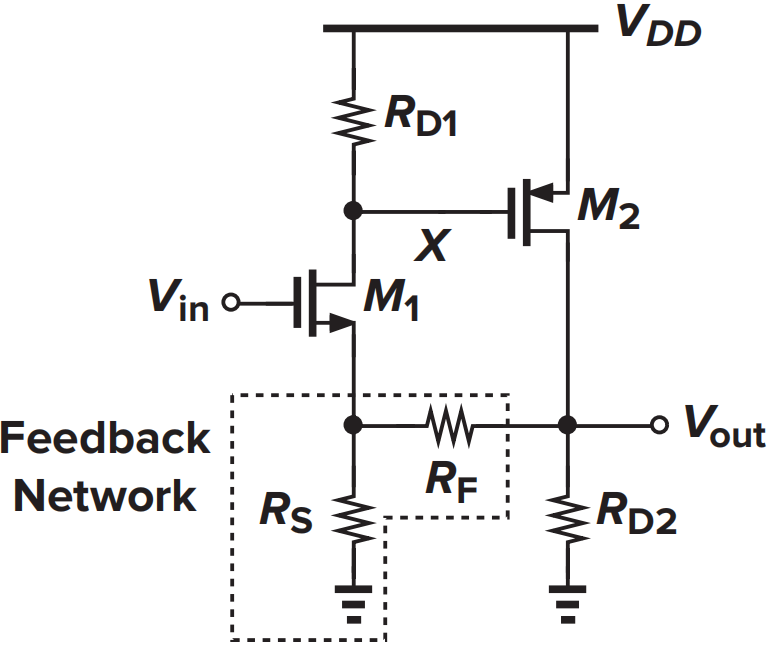
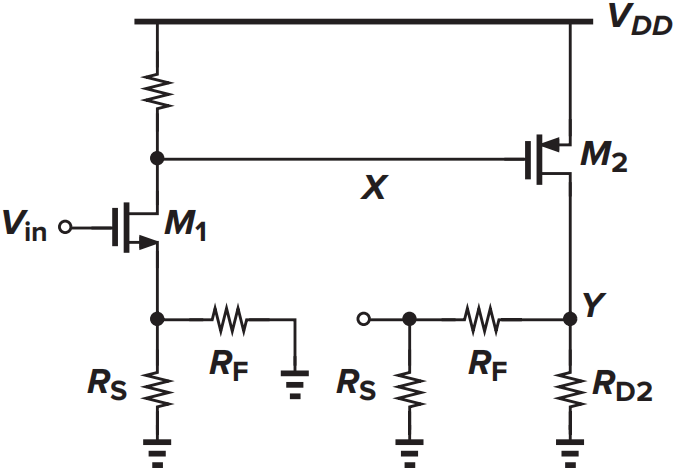
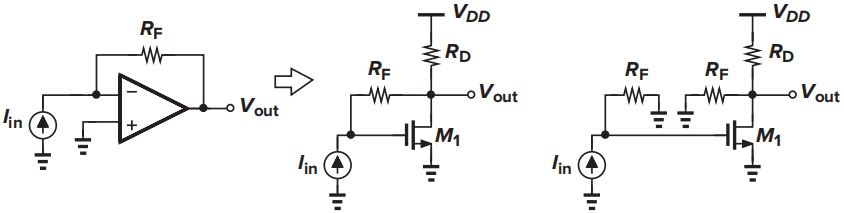
左图是原电路图,可以看出是电压-电压负反馈。右图是考虑了加载效应的开环等效图。则开环增益为:
由于\(A_{v,close}={A_{v,open}/(1+g_{21}A_{v,open})}\),因此只需要找到\(g_{21}\)即可得到闭环增益。在电压-电压反馈考虑加载效应的模型中,关于\(g_{21}\)在反馈网络中有
其中,\(V_{fb}\)为反馈网路的输出电压(位于前馈网络输入端),\(I_{fb}\)为反馈网络的输出电流。因此为了求得\(g_{21}\),可令\(I_{fb}=0\),此时在电路中求得
此时根据\(A_{v,close}={A_{v,open}/(1+g_{21}A_{v,open})}\)即可求得闭环增益。
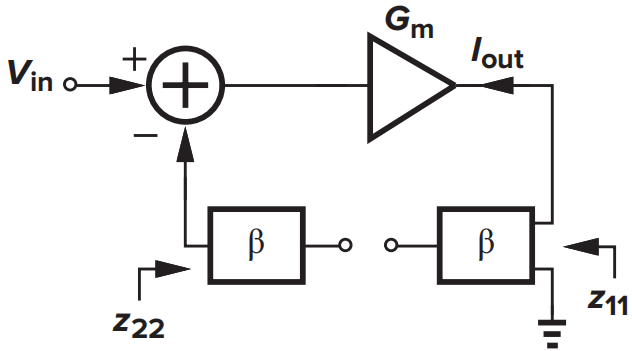
电流-电压反馈
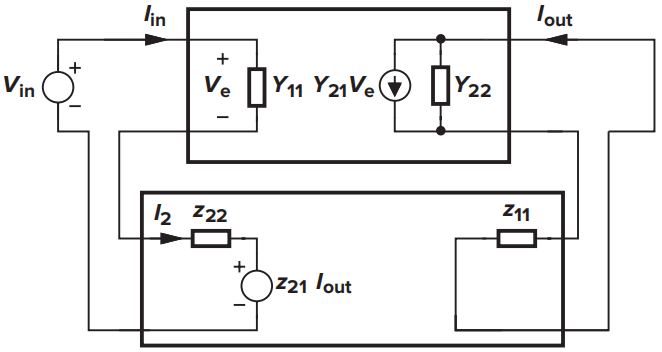
电流-电压反馈前馈网络采用Y参数进行建模,反馈网络采用Z参数。这是由于前馈网络的输入为电压信号,输出为电流信号,因此前馈网络的增益为跨导量纲;而反馈信号的输入为电流信号,输出为电压信号,增益为阻抗量纲。
电流-电压反馈的加载效应可以体现为以下形式:
- 电路示例:
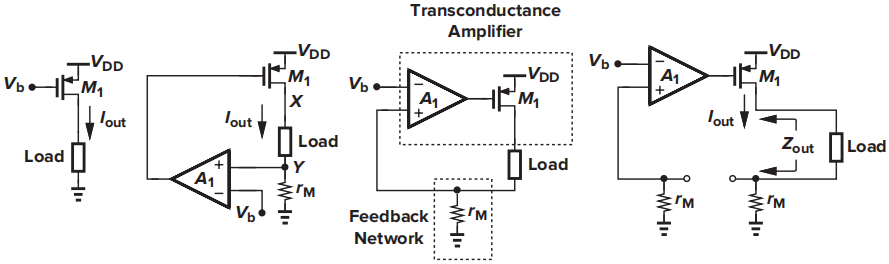
开环增益计算为:
反馈系数\(z_{21}\)可由\(I_2=0\)条件下求得
则闭环输出电流为
开环时的负载看到的阻抗为\(r_O+r_M\),反馈调节了输出电流使输出阻抗提高了\(A_1g_mr_M\)倍,为
使得该电路更接近理想电流源。
电压-电流反馈
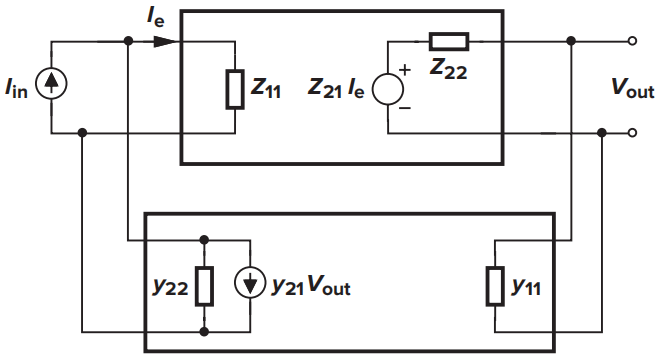
电压-电流反馈前馈网络采用Z参数进行建模,反馈网络采用Y参数进行建模。加载效应可表现为以下形式:
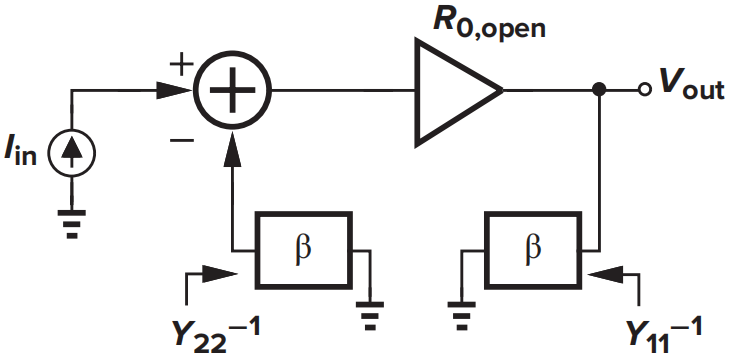
- 电路实例:
开环增益可通过考虑加载效应的开环等效电路图得到
反馈系数\(y_{21}\)可由\(I_{fb}=V_{fb}y_{22}+V_{out}y_{21}\)当\(V_{fb}=0\)时求得:
则闭环增益\(R_{0,close}\)为
电流-电流反馈
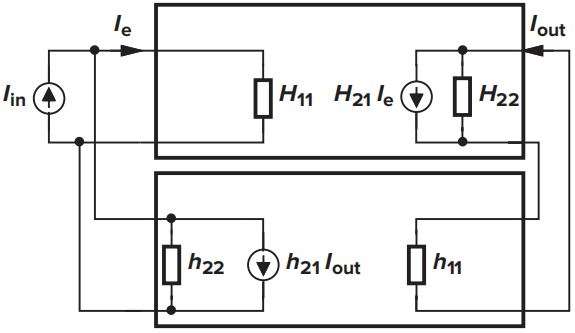
电流-电流反馈前馈网络和反馈网络都属于电压放大器模型,都是用H模型进行建模。其加载效应如下所示:
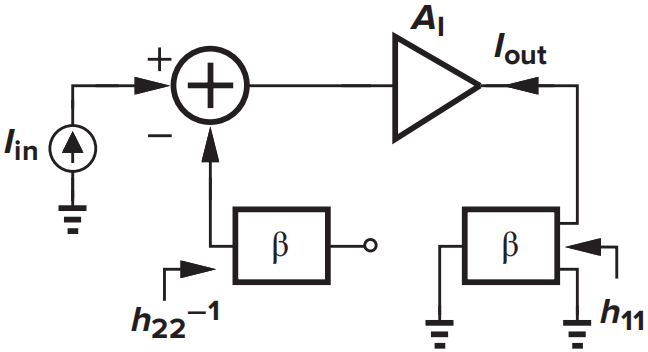
- 电路实例:
开环增益为:
反馈系数由\(I_{fb}=V_{fb}h_{22}+I_{out}h_{21}\)得到:
则可由\(A_{i,close}={A_{i,open}/(1+\beta A_{i,open})}\)求得闭环增益。
加载效应小结
四种反馈结构的加载效应开环等效如下表所示:
|
|
|---|---|
| 电压-电压反馈 | 电流-电压反馈 |
|
|
| 电压-电流反馈 | 电流-电流反馈 |
计算闭环增益的步骤为:
- 画出相应电路包含加载效应的开环等效电路图;
- 根据等效图计算开环增益\(A_{open}=OUT/IN\),此时求得的开环增益包含了加载效应的影响;
- 计算反馈系数\(\beta\),根据使用的等效参数模型(Z,Y,G,H)的等式来求得反馈系数;
- 根据得到的\(A_{open}\)和\(\beta\)即可求得环路增益\(LP=\beta A_{open}\)和闭环增益\(A_{close}=A_{open}/1+{\beta A_{open}}\);
- 求系统的输入/输出阻抗。根据等效电路图先求得开环时的输入/输出阻抗,然后根据反馈类型和环路增益可以求得闭环时的输入/输出阻抗。
二端口等效的优势与局限
| 优点 | 缺点 |
|---|---|
| 计算开环增益时包含加载效应 | 忽略了前馈效应(可能会忽视零点) |
| 能较为简单且精确地求得环路增益和闭环增益 | 不能应用于非规范结构 |
| 可以递归地应用于多重反馈机制 | - |
波特法
波特法原理与意图
详见拉扎维第二版282~286页。
波特分析
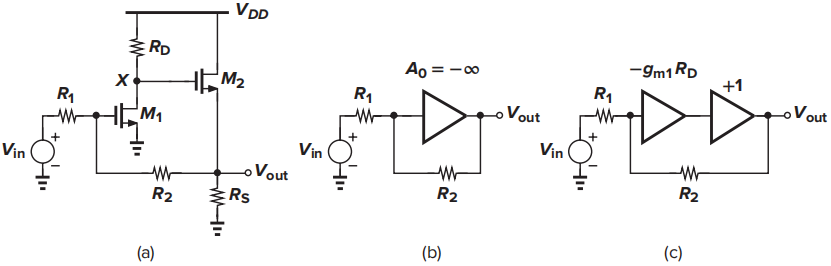
波特分析中需要计算A,B,C,D四个系数。以具体电路为例:
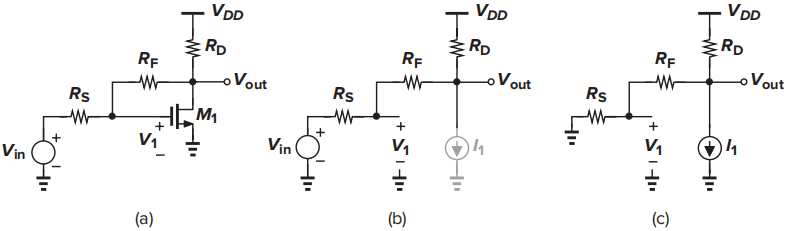
图(a)为原始电路,为了求得A,C系数,将电路中的一个受控源去掉,得到了图(b);为了求得B,D系数,将输入信号置零,得到了图(c)。
| 受控源为0 | 输入信号为0 |
|---|---|
| $$A={V_{out}\over{V_{in}}}={R_D\over{R_D+R_S+R_F}}$$ | $$B={V_{out}\over{I_1}}=-{R_D(R_S+R_F)\over{R_D+R_S+R_F}}$$ |
| $$C={V_1\over{V_{in}}}={R_F+R_D\over{R_D+R_S+R_F}}$$ | $$D={V_1\over{I_1}}=-{R_SR_D\over{R_D+R_S+R_F}}$$ |
-
环路增益:\(LP=-g_mD\)
-
开环增益:\(A_{open}\approx g_mBC\)(不精确的等效)
-
闭环增益:\(A_{close}=A+{g_mBC\over{1-g_mD}}={A+g_m(BC-AD)\over{1-g_mD}}\)
\(-g_mD\)还可被称作返回比(RR),表示环路增益。
布莱克曼阻抗定理(Blackman’s theorem)
该定理采用与波特方法类似的计算形式,用来计算所关心端口的阻抗。
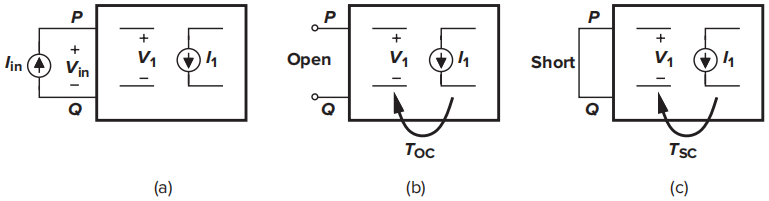
由图(a)引出
则端口阻抗为
为了获得更加直观的表达式,我们将公式变形。首先,由式\((8.18)\)可得,当\(I_{in}=0\)时\(V_1/I_1=D\),我们称\(-g_mD\)为“开路环路增益”,并以\(T_{OC}\)表示;在式\((8.17)\)中令\(V_{in}=0\),则可得到\(I_{in}=(-B/A)I_1\),将该式带入\((8.18)\)中即可得到\(V_1/I_1={(AD-BC)/A}\),我们将该量乘以\(-g_m\)称为“短路环路增益”,并以\(T_{SC}\)表示。
将\(Z_{in}\)用\(T_{OC}\)和\(T_{SC}\)表示为
- 电路实例:
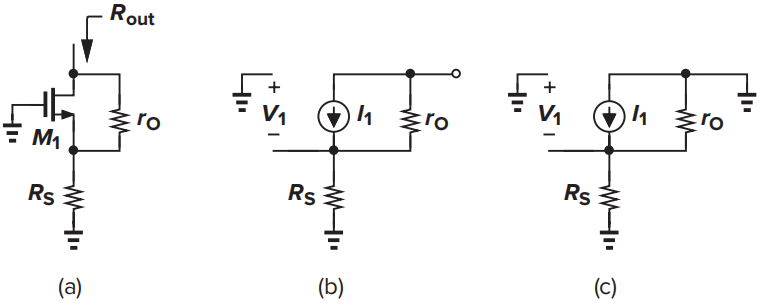
- 计算\(A\),将晶体管受控源禁用,有:
- 计算\(T_{OC}\),将所关心的端口开路,有:
- 计算\(T_{SC}\),将所关心的端口短路,有:
- 计算端口阻抗\(R_{out}\),有:
环路增益计算
计算环路增益时常常会断开环路进行计算,而断开环路的位置不同可能会导致加载效应。以下是断开环路并插入测试源的一些建议
如果希望注入电压:在MOS管栅极断开环路,一端注入测试电压,在另一端得到输出电压;
如果希望注入电流:替换MOS管的受控源,在MOS栅极得到输出电压,此时环路增益为\((-V_{GS}/I_1g_m)\)。
使用返回比RR计算时可能会遇到一种情况:系统中的晶体管(\(g_m\)级)不止一个,此时应该对哪个晶体管计算返回比呢?建议是
尽量不要破坏系统中存在的反馈
波特法的另一种解释
增益渐进形式
已知闭环增益为\(A_{close}=A+{g_mBC/{1-g_mD}}\),禁用受控源时,即\(g_m=0\)时\(A_{close}=A\);当受控源非常强,即\(g_m\rightarrow\infty\),则\(A_{close}=A-BC/D\)。我们将\(g_m=0\)时的闭环增益称为\(H_0\),可以理解为直接馈通增益,将\(g_m\rightarrow\infty\)时的闭环增益称为\(H_{\infty}\),可以理解为理想增益。令\(T=-g_mD\),则可得到闭环增益的增益渐进形式:
电路实例:
图中存在两个MOS管,即存在两个受控源。选择\(M_1\)作为受控源,当\(g_{m1}=0\)时,有
当\(g_{m1}=\infty\)时,有
令输入\(V_{in}=0\),用独立源\(I_1\)替换\(M_1\)的受控源,计算\(T_1\)
双零值方法
根据布莱克曼阻抗定理,我们可以考虑将传输函数也写作\(Z_{in}=V_{in}/I_{in}=A(1+T_{SC})/(1+T_{OC})\)的形式,即将阻抗中的\(V_{in}\)替换为增益计算时的\(V_{out}\),将阻抗中的\(I_{in}\)替换为增益计算的\(V_{in}\),我们将增益表示为
其中,\(T_{out,0}\)表示\(V_{out}=0\)时的返回比,\(T_{in,0}\)表示\(V_{in}=0\)时的返回比。
注意满足\(A\neq 0\)才能使用双零值方法。
波特法优势与局限
| 优点 | 缺点 |
|---|---|
| 不用断开环路就能计算闭环增益 | 只存在一种反馈机制时才能得到环路增益 |
| 可以应用于任意结构 | - |
麦德布鲁克方法
利用“分离定理”,在不断开环路的情况下能得到闭环传输函数,并且包含非单向环路的影响。
详情见拉扎维第二版8.7小节(也是较为简单的描述),以后有需要再做补充。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号