逆向破解H.Koenig 遥控器 Part 2
逆向破解H.Koenig 遥控器 Part 2
到目前为止,我们已经知道了RF收发器的安装过程,下面是我们所掌握的东西 :
l 无线电收发器是一个Avantcom A7105
l 调制是FSK
l 频率偏差设置为186KHz
l 基本频率为2.40 GHz
l 在任何传输之前信道被设定为100
l 频道空间是500千赫
l 因此,工作频率为2.45 GHz
l ID是0×58 0x52 0xD2 0×41
l 带宽为500 kbps
l 分组8字节长
l 前导码4字节长
l 禁用CRC
l 禁用数据百花
l 禁用FEC编码
l 固件由于是进行了优化的收发器复位,因此绝对不适合 电源,且在每一个FIFO操作前安装完了!
下面是描述数据包格式收发器数据表的格式:
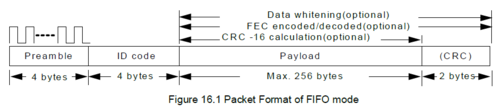
在本例中,根据我们所解码的,包的头部被限制到4个字节,随后是4个字节的ID码以及最后的8个字节的有效载荷(不进行编码,没有数据白化,没有CRC)。
好吧,现在对协议进行深层次挖掘。
首先,Hook我们最喜欢的逻辑分析仪的SPI总线,并尝试每一个按钮!遥控器图片如下:

有14个按钮,所以我们期待在14个不同的数据包发送。
事实上,对于每个按钮,当按下按钮时,遥控器发送分组而另一个就被释放,所以我们会得到28包。
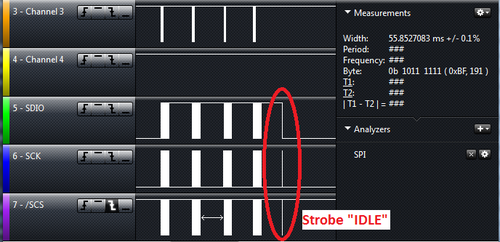
MCU会在50ms和55ms之间等待,并在每个传输和发送“IDLE”到最后“按钮弹起”事件后的收发器的时间是55ms。
下面捕捉的画面,你可以看到,按下的按钮已发送3次,其次是数据包中的“发布”按钮。在右上角的数据包中,你可以看到两个传输之间的延迟是55ms。

如果你想知道最后的微小的跳变是什么,答案可以在这最后一张图片中找到 :
好了,等的够久了,下面是每个按钮的数据包。第一个是用于“ 向下 ”事件,而第二个表示一个“ 向上 ”事件。
“Thursday” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x01 0xF7
0xAA 0x00 0x03 0x49 0x00 0x00 0x11 0x07
“Full Go” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x02 0xF8
0xAA 0x00 0x03 0x49 0x00 0x00 0x12 0x08
“Wednesday” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x03 0xF9
0xAA 0x00 0x03 0x49 0x00 0x00 0x13 0x09
“Friday” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x04 0xFA
0xAA 0x00 0x03 0x49 0x00 0x00 0x14 0x0A
“Sunday” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x05 0xFB
0xAA 0x00 0x03 0x49 0x00 0x00 0x15 0x0B
“Monday” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x06 0xFC
0xAA 0x00 0x03 0x49 0x00 0x00 0x16 0x0C
“OK” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x07 0xFD
0xAA 0x00 0x03 0x49 0x00 0x00 0x17 0x0D
“Saturday” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x08 0xFE
0xAA 0x00 0x03 0x49 0x00 0x00 0x18 0x0E
“Tuesday” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x09 0xFF
0xAA 0x00 0x03 0x49 0x00 0x00 0x19 0x0F
“Red” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x0A 0x00
0xAA 0x00 0x03 0x49 0x00 0x00 0x1A 0x10
“Down” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x0B 0x01
0xAA 0x00 0x03 0x49 0x00 0x00 0x1B 0x11
“Left” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x0C 0x02
0xAA 0x00 0x03 0x49 0x00 0x00 0x1C 0x12
“Right” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x0D 0x03
0xAA 0x00 0x03 0x49 0x00 0x00 0x1D 0x13
“Up” button
0xAA 0x00 0x03 0x49 0x00 0x00 0x0E 0x04
0xAA 0x00 0x03 0x49 0x00 0x00 0x1E 0x14
可能已经注意到,只有最后的两个字节发生变化。
到目前为止,我们可以假设,第二到最后一个字节编码在低半字节和其状态的按钮(按下/释放)在较高的半字节。
我的猜测是,最后一个字节计算是针对上一个的(或者都是之前 的)。
但是,我们仍然丢失了一些东西。根据手册,有一个配对过程来与给定的远程机器人进行 工作:按下“OK”按钮并保持5秒钟,它仍按下 后,启动机器人。两声提示音(机器人发出),确认与 遥控器进行配对。
如果我们试图用我们SPI总线上的逻辑分析仪进行上述过程的话,我们在 前几秒钟(2.3秒)就能捕获到分组:
0xAA 0x00 0x03 0x49 0x00 0x00 0x07 0xFD
然后,分组更改为:
0x55 0x00 0x03 0x49 0x00 0x00 0x00 0xA1
因此,第一个字节是用来告诉机器人一些“代码”。不幸的是我没有其他遥控器来测试这个观点,机器人本身更难以采取APPART,来处理它的固件。但我 猜测可能是这样的:
1.第一个字节使能操作模式
2.下面的5个字节是遥控器的硬编码的序列号,该机器人会去自我配对
3.第二和最后一个字节编码按钮
4.最后一个字节是一种校验和(因为它们禁用内部CRC)。
这是第二部分。第三部分(也是最后一个部分)我们将建立一个计算机控制的遥控器。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号