zephyr的GPIOTE驱动开发记录——基于nordic的NCS
简介:
本次测试了zephyr的中断驱动方式(GPIOTE),在这可以去看zephyr的官方文档对zephyr的中断定义,连接如下,Interrupts — Zephyr Project Documentation (nordicsemi.com) ;版本可能不对应,但是原理是一致的,今天记录的就是其中的零延迟中断,就是减少中断时间,让来自外部的中断能快速响应,进入到我们的中断服务程序中进行快速执行(也就是ISR)。
注意:本次测试中有两个版本的代码,我会再需要版本区别的时候进行备注,主要区分为v2.0之后(如V2.3,V2.4)以及v2.0之前(如V1.8),实际开发中请自行区别

根据文档,就作者理解如下,如有更好的理解可以进行指正,有些时候在执行某些线程时对时间有要求或者在临界区进行操作时,不能够被外部中断(ISQ)打断,可以禁止该ISR(中断服务程序)的执行。通过IRQ禁止达到在处理某些线程时不会被打断,但是会让中断处理被延迟,但这时候又出现一个矛盾,有些中断是我想要及时处理的,那么我们需要不被屏蔽掉,就是这个中断中需要处理的事是比前面列举的线程执行更重要的事,那么怎么办,可以直接使用零延迟中断进行定义,让这些中断直接得到响应,在零延迟中断中又分为两种:一是常规的ISR,二是直接的ISR(某些情况下比常规的更快),常规的ISR可能还是会被打断,导致一些开销产生,具体打断情况在zephyr中有4点列举:

如果某个任务完全不想要被打断,快速的执行,那么就可以使用直接ISR(direct ISR)。在作者看来正常情况下(没有其余中断打断的情况下),他们两的时间应该是一致的。具体可以点击文章顶部给出的链接,直接看官方描述。
本次测试采用nordic的硬件与软件进行测试,在开发之前默认你已经配置好nordic的相关开发环境,如果是第一次开发,建议去安装下面给出的官方环境搭建参考文档,或者去哔哩哔哩观看环境搭建的学习视频(VS code),也可以参看我文章中的关于9160开机测试的文章。官方连接如下:开发你的第一个nRF Connect SDK(NCS)/Zephyr应用程序 - iini - 博客园 (cnblogs.com)
参考资料:
nordic的官方讲解视频,可以在哔哩哔哩上搜索nordic半导体去看关于其中一个视频:zephyr的设备驱动程序模型,中断和电源管理视频,中文讲解( https://www.bilibili.com/video/BV1MU4y177Zhis_story_h5=false&p=1&share_from=ugc&share_medium=android&share_plat=android&share_session_id=c0145896-48dc-4bbf-b938f1f4b3a4644a&share_source=WEIXIN&share_tag=s_i×tamp=1668583626&unique_k=29oQkX4),或者直接参看zephyr的官方文档。
本次测试环境:
VS code、NCS1.8和NCS2.x(也就是2.0以上)
一、建立工程
建立一个zephyr的工程,如果你有NCS,并且已经安装好相关可以进行开发的环境,那么可以打开一个hello Word的工程进行添加,为什么可以依据nordic官方NCS进行开发,因为它也有如STM32等芯片底层文件,nordic只是在zephyr的SDK中加入了自己的产品形成了NCS包,其余zephyr原本有的并没有删减,所以你可以在NCS中建立如STM32芯片的工程进行开发,且上层的驱动都是抽象的,只是对应于硬件的定义换成了具体的芯片定义,我们只用管上层的APP开发,所以一套代码,可以建立成不同芯片的工程,并且在编译下载后依然可以运行,不止局限于nordic的开发(至少保证硬件资源差不多)。
1、zephyr工程建立
对于zephyr可以直接建立一个文件夹,然后再里面包含如下的几个文件就可以进行编译开发了,

1)、其中src中放置我们的.c文件(APP),便于管理;
2)、CMakeLists.txt是工程创建的根本文件,具体内容可以是如下:
#这是cmake的版本 cmake_minimum_required(VERSION 3.20.0) #添加的库 find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE}) #建立的工程名字(本次为hello_world,可以改为GPIOTE等) project(hello_world) #添加.c文件,稍后在src中建立一个main.c target_sources(app PRIVATE src/main.c)
3)、prj.conf为配置文件
很多时候还需要一个overlay文件,可以进行设备树驱动的更改,在zephyr中有一个默认的硬件定义文件,如果自己工程中需要定义更改,就用overlay文件进行实现,这样不会影响都其余工程,值针对于本工程修改。
由于本次我使用的是nordic的SDK(NCS),我可以在VS code上安装好相关插件,然后直接镜像创建一个工程在其余文件中(根据自己选择,但是保证和NCS处于同一个磁盘中即可),如果不会请参看前面提到的教学文档与教学视频,在观看后,你就可以理解为什么只是这几个文件就可以建立一个工程了。
因此我们根据NCS中的hello_word建立一个镜像工程,并把该工程的文件夹名字命令为gpiote,且工程也建立为gpiote,,然后建立一个可以跑在nrf5340的应用核的工程。具体如下,该工程主要功能是,通过串口打印出,“hello world+板子信息”。

2、添加自定义.c文件
原本已经有一个.c文件了,该文件中主要就是串口打印信息,本次测试是需要测试中断,所以我们在定义一个名字为gpiote.c的文件(如下图),添加到我们工程中,然后再进行代码编写。
然后把gpiote.c加入到工程,这就需要我们打开我们的CMakeLists.txt,添加如图所示代码,把gpiote.c加入我们的工程中(相当于keil的源文件添加):
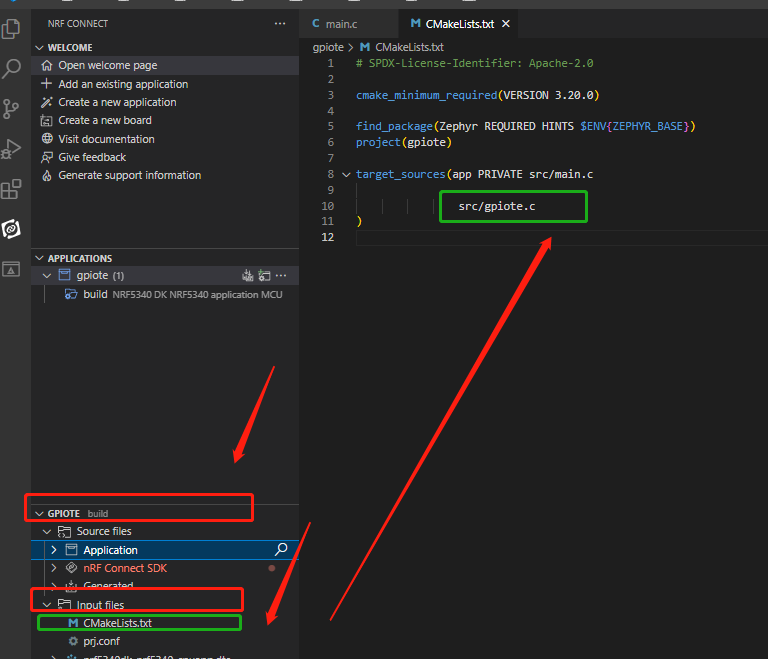
然后点击全编译,我们就可以看到我们的工程下加入了gpiote.c文件:

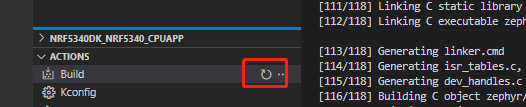
全编译如下图所示的按钮:
3、overlay文件加入
这里有一个隐藏的规则,如果你看了前面推荐的nordic中文官方博客连接的内容,那么应该知道,在工程目录下建立文件名和我们使用的板子一致时,可以不用在CMakeLists.txt中进行文件添加,编译器建立工程时可以识别这overlay文件,知道你要更改默认的devicetree定义,会把你自己工程下的.overlay文件加入进入一起编译生成最终的设备树文件.dts文件,如果不知道请去看下前面给出的链接,那么zephyr定义了那些板子呢,他们的名是什么,可以直接在vs code中进行查看,就行是你建立工程时选择的板子名字的地方:
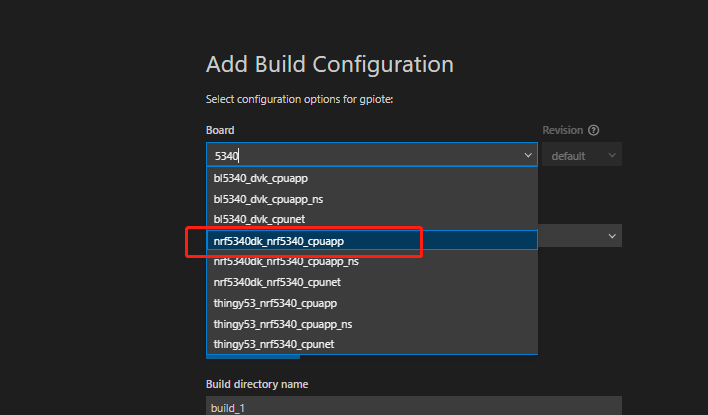
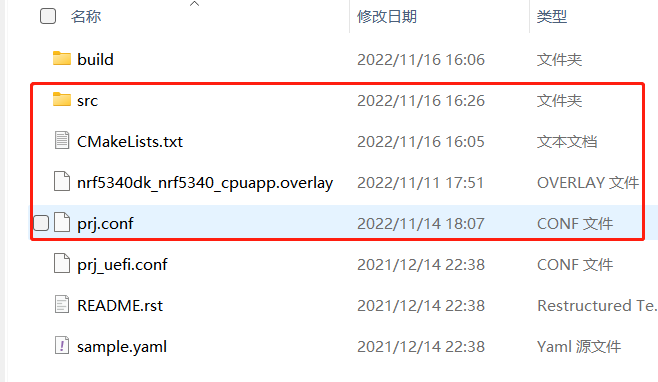
由于我使用的是nrf5340,那么我就建立一个同名的overlay文件,最后我们工程目录如下,就看我框选部分,其余是建立hello_word镜像工程时产生的:
二、设备树更改
1、基于NCS1.8版本
这里注意的是我使用了1.8的NCS,如果你使用高版本的NCS如2.1,那么overlay文件会有一点问题,你可以参考其余工程就行修改。
主要是添加一个中断口定义,我们在nrf5340dk_nrf5340_cpuapp.overlay中进行处理,在添加前我们来看一下设备树文件zephyr.dts,建立编译工程后,可以在如下目录找到它:
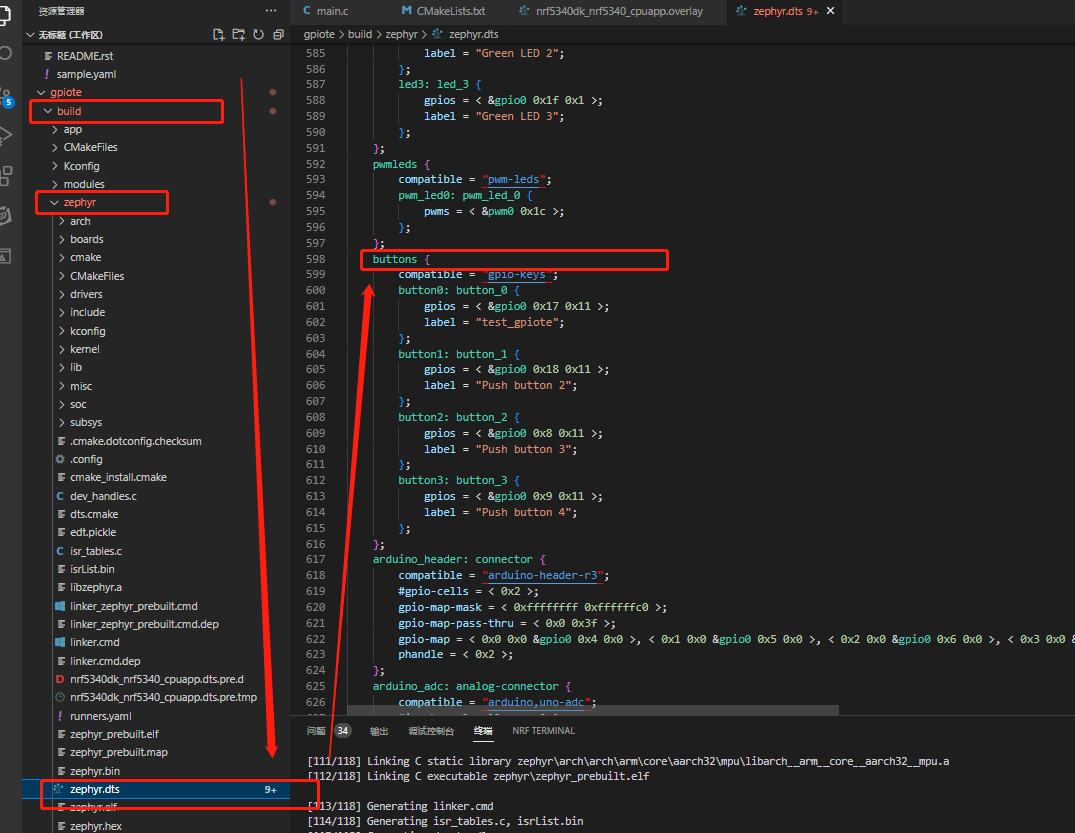
可以看到已经有一个buttons的设备定义了,我想自己加一个自己的按键定义,作为中断触发源,我使用的是官方开发板,按键依然是那几个,但是我可以再定义一个,然后起一个其他的名字。具体如下,在overlay中添加代码:
/*参数加入devicetree的位置*/ /{ /*其别名,这主要给test_button其一个别名,然后可以在APP中通过别名gpiote定位到我们定义的按键*/ aliases { gpiote = &test_button; }; /*在原有的buttons下定义一个测试IO口,并且定位为GPIO0的0x17脚,即P0.23,名字为test_gpiote*/ buttons{ test_button: test_button { gpios = < &gpio0 0x17 0x11 >; label = "test_gpiote"; }; }; };
截图如下:

编译后可以在zephyr.dts中看到本次添加的定义:

2、基于v2.x(x=1,2,3,4,5)之后的版本
2.1、如何定义一个自定义节点
在前一节中是在原有的.dts中加入了一个新的定义,本节是定义一个属于我们自己的设备树节点,然后做按键中断触发;
/*参数加入devicetree的位置*/ /{ /*其别名,这主要给test_button其一个别名,然后可以在APP中通过别名gpiote定位到我们定义的按键,起别名不要有大写和特殊字符*/ aliases { gpiote = &test_button; }; /*定义一个新的节点,名字为 my_gpio_test,其中定义一个子节点 test_button */ my_gpio_test{ compatible = "gpio-keys"; test_button: m_test_button { gpios = < &gpio0 11 GPIO_ACTIVE_HIGH>, <&gpio0 12 GPIO_ACTIVE_HIGH>; label = "test_button"; }; }; };
这一段代码的意义是说,在新定义的节点my_gpio_test中定义一个子节点,名字为 m_test_button ,同时定义该子节点的标签名为 test_button,然后在别名aliases中引用这个标签,把其赋值给 gpiote ,在之后的编程中我们只要在节点 aliases 中去查找响应的别名就可以找到我们自定义的节点了。
其中还有一个很重要的点就是 compatible ,就像上面的 compatible = "gpio-keys"; 。每一个节点都要有一个兼容属性,这里有两种情况:
- 第一种是,我们自定义的节点有父节点,在父节点中有一个compatible 兼容属性了,那么我们可以忽略,不写,因为子节点可以继承父节点的 compatible
eg:如图在父节点中 pin-controller 中已经定义了兼容属性,那么该节点下的两个子节点可以不用再定义兼容属性,但是如果 pin-controller 中没有定义,那么就会找到更上一层的父节点,直到找到。如果找到根节点都没有,你们就是没有兼容属性,这会导致在程序中区查询我们的设备树节点时无法找到,使用不了

- 第二种,父节点没有 compatible 属性,或者父节点有,但是我们想使用另一个兼容属性,那就直接使用 compatible 进行定义,如上面我自定义的 my_gpio_test 节点,是直接放在根节点下的一个自定义节点,如果我不在其中定义 compatible 属性,那么它会去其父节点找,但是父节点就是根节点没有任何的 compatible 属性。所以你会发现如果不定义 compatible 会导致在程序中去找这个节点的时候总是找不到,导致编译失败。
2.2、节点的 compatible 加入注意事项
在选择一个 compatible 后我们需要按照他的规则加入对应的属性才可以编译成功,不然会建立失败:
my_gpio_test{ compatible = "gpio-keys"; test_button: m_test_button { gpios = < &gpio0 11 GPIO_ACTIVE_HIGH>, <&gpio0 12 GPIO_ACTIVE_HIGH>; label = "test_button"; }; };
对于上面这一段代码,加入的兼容属性是 gpio-keys ,如何看它的规则,需要跳转过去看,在使用VS code开发时,按住 Ctrl后把鼠标移动到 gpio-keys 上单机就跳转过去yaml文件了,其中定义了该兼容属性要使用必须对每一个子节点添加哪些属性。
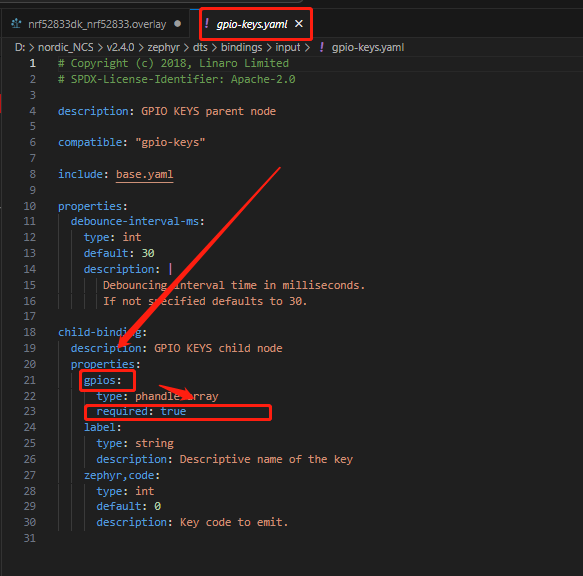
如截图,在 gpio-keys 的yaml中只有一个属性是必须的,其他属性可选可不选,也就是
required: true
required中文是必须的意思,然后值为true,且他在 gpios 下面,说明如果你使用了兼容属性 gpio-keys ,那么在定义设备树节点时必须有 gpios,不然就会编译报错,除此之外的 label 和 zephyr,code 没有使用 required 进行定义,那就是可选的,换句话说:
我的设备树定义
my_gpio_test{ compatible = "gpio-keys"; test_button: m_test_button { gpios = < &gpio0 11 GPIO_ACTIVE_HIGH>, <&gpio0 12 GPIO_ACTIVE_HIGH>; label = "test_button"; }; };
可以替换为:
my_gpio_test{ compatible = "gpio-keys"; test_button: m_test_button { gpios = < &gpio0 11 GPIO_ACTIVE_HIGH>, <&gpio0 12 GPIO_ACTIVE_HIGH>; }; };
2.3、代码中获取设备树节点
代码:
const struct gpio_dt_spec m_pin_1 = GPIO_DT_SPEC_GET_BY_IDX(DT_ALIAS(gpiote),gpios,0); const struct gpio_dt_spec m_pin_2 = GPIO_DT_SPEC_GET_BY_IDX(DT_ALIAS(gpiote),gpios,1);
在定义的最后面有0和1两个参数分别获取的是 m_test_button 节点中的 两个节点,对应如下:
/*参数加入devicetree的位置*/ /{ /*其别名,这主要给test_button其一个别名,然后可以在APP中通过别名gpiote定位到我们定义的按键,起别名不要有大写和特殊字符*/ aliases { gpiote = &test_button; }; /*定义一个新的节点,名字为 my_gpio_test,其中定义一个子节点 test_button */ my_gpio_test{ compatible = "gpio-keys"; test_button: m_test_button { gpios = < &gpio0 11 GPIO_ACTIVE_HIGH>; label = "test_button"; }; }; };
获取设备树:
const struct gpio_dt_spec m_pin_1 =GPIO_DT_SPEC_GET(DT_ALIAS(gpiote),gpios);
或者:
const struct gpio_dt_spec m_pin_1 = GPIO_DT_SPEC_GET_BY_IDX(DT_ALIAS(gpiote),gpios,0);
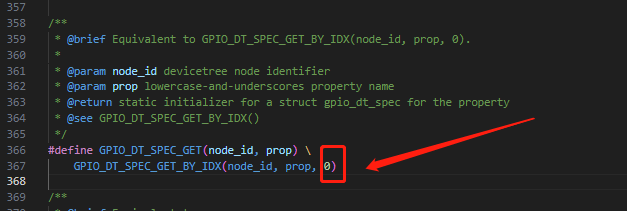
其实最终GPIO_DT_SPEC_GET 的实现就是使用了 GPIO_DT_SPEC_GET_BY_IDX,截图如下:
三、应用代码编写
1、常规方式的ISR
1.1、V1.8版本
在gpiote.c中的代码如下:
#include "device.h" #include "irq.h" #include <zephyr.h> #include <sys/printk.h> #include <sys/util.h> #include <device.h> #include <devicetree.h> #include <drivers/gpio.h> #include <nrfx.h> #include <dk_buttons_and_leds.h> #define PIN DT_GPIO_PIN(DT_ALIAS(gpiote), gpios) /* 建立一个gpio引脚的类*/ struct gpio_pin { const char * const port; const uint8_t number; }; /* 定义gpio_pin类型的变量,用于读取设备定义信息,这以数组的形式定义, 便于有多个按键时可以直接定义获取,ARRAY_SIZE用于计算大小的函数*/ static const struct gpio_pin init_pin[] ={ {DT_GPIO_LABEL(DT_ALIAS(gpiote), gpios), DT_GPIO_PIN(DT_ALIAS(gpiote), gpios)}, }; /* */ static const struct device * init_device[ARRAY_SIZE(init_pin)]; /* 定义回调类型的变量*/ static struct gpio_callback gpiote_cb; /*回调函数*/ void gpio_inte_handle(const struct device *port, struct gpio_callback *cb, gpio_port_pins_t pins) { printk("run to gpiote test\n"); } /*GPIOTE程序*/ void gpiote_test(void) { /*如果同时有多个按键可以增加数组个数*/ int err; uint32_t pin_mask = 0; /*获取设备*/ init_device[0]=device_get_binding(init_pin[0].port); if (!init_device[0]) { printk("Cannot bind gpio device"); } /*配置gpio口,输入上拉*/ err = gpio_pin_configure(init_device[0], init_pin[0].number, GPIO_INPUT | GPIO_PULL_UP); if (err) { printk("Cannot configure button gpio"); } /*中断配置*/ err = gpio_pin_interrupt_configure(init_device[0], init_pin[0].number, GPIO_INT_DISABLE); if (err) { printk("Cannot disable callbacks()"); } pin_mask |= BIT(init_pin[0].number); /*回调设置*/ pin_mask |= BIT(init_pin[0].number); /*回调设置*/ gpio_init_callback(&gpiote_cb, gpio_inte_handle, pin_mask); /*将刚刚绑定的结构添加到向量表中*/ err = gpio_add_callback(init_device[0], &gpiote_cb); if (err) { printk("Cannot add callback"); } /*将GPIO中断配置为下降沿触发,并启用它*/ err = gpio_pin_interrupt_configure(init_device[0], init_pin[0].number, GPIO_INT_EDGE_FALLING); if (err) { printk("Cannot disable callbacks()"); } printk("test start\n"); while(1) { } } /*创建一个区别于main.c中的线程,用于初始化gpiote功能 */ K_THREAD_DEFINE(gpiote_test_id,1024,gpiote_test,NULL,NULL,NULL,7,0,0);
在此程序的基础上,你可以定义多个按键并放入设备模型数组。虽然我本次测试只使用了一个按键,如果你添加的是多个按键,记得初始化时用for循环,把每一个设备都添加一下,我这只有一个设备所以只使用了数组的第0位的设备(也就是只有一个设备)。
结果:

1.2、V2.x版本以上代码编写
检查设备树节点设备是否获取成功:
int err;
err = device_is_ready(p_pin.port);
if (!err) {
printk("not button\n");
return err;
}
配置IO口为输入:
err = gpio_pin_configure_dt(&p_pin, GPIO_INPUT | GPIO_PULL_UP);
if (err < 0) {
printk("button input config fail\n");
return err;
}
配置引脚为中断模式:
err = gpio_pin_interrupt_configure_dt(&p_pin,GPIO_INT_EDGE_FALLING);
if (err) {
printk("Cannot disable callbacks");
return err;
}
初始化中断回调:
gpio_init_callback(&button_cb_data, gpio_inte_handle, pin_mask);
因为我定义两个GPIO口,所以在一个回调中要去判断是那个引脚的中断,所以用 pins & BIT(pin_mask) 进行检查,
完整代码如下:
/*
* Copyright (c) 2012-2014 Wind River Systems, Inc.
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/gpio.h>
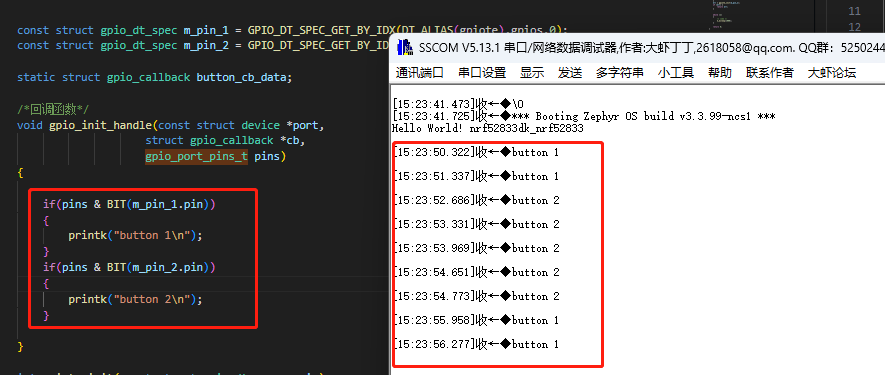
const struct gpio_dt_spec m_pin_1 = GPIO_DT_SPEC_GET_BY_IDX(DT_ALIAS(gpiote),gpios,0);
const struct gpio_dt_spec m_pin_2 = GPIO_DT_SPEC_GET_BY_IDX(DT_ALIAS(gpiote),gpios,1);
static struct gpio_callback button_cb_data;
/*回调函数*/
void gpio_inte_handle(const struct device *port,
struct gpio_callback *cb,
gpio_port_pins_t pins)
{
if(pins & BIT(m_pin_1.pin))
{
printk("button 1\n");
}
if(pins & BIT(m_pin_2.pin))
{
printk("button 2\n");
}
}
int gpiote_init(const struct gpio_dt_spec p_pin)
{
static uint32_t pin_mask = 0;
int err;
err = device_is_ready(p_pin.port);
if (!err) {
printk("not button\n");
return err;
}
err = gpio_pin_configure_dt(&p_pin, GPIO_INPUT | GPIO_PULL_UP);
if (err < 0) {
printk("button input config fail\n");
return err;
}
err = gpio_pin_interrupt_configure_dt(&p_pin,GPIO_INT_EDGE_FALLING);
if (err) {
printk("Cannot disable callbacks");
return err;
}
pin_mask |= BIT(p_pin.pin);
gpio_init_callback(&button_cb_data, gpio_inte_handle, pin_mask);
err = gpio_add_callback(p_pin.port, &button_cb_data);
if (err) {
printk("gpio_add_callback fail");
return err;
}
}
int main(void)
{
int err;
printk("Hello World! %s\n", CONFIG_BOARD);
err = gpiote_init(m_pin_2);
if (err) {
return err;
}
err = gpiote_init(m_pin_1);
if (err) {
return err;
}
while (1)
{
/* code */
k_msleep(1000);
}
return 0;
}
结果:
2、zephyr中的direct ISR(直接中断模式)
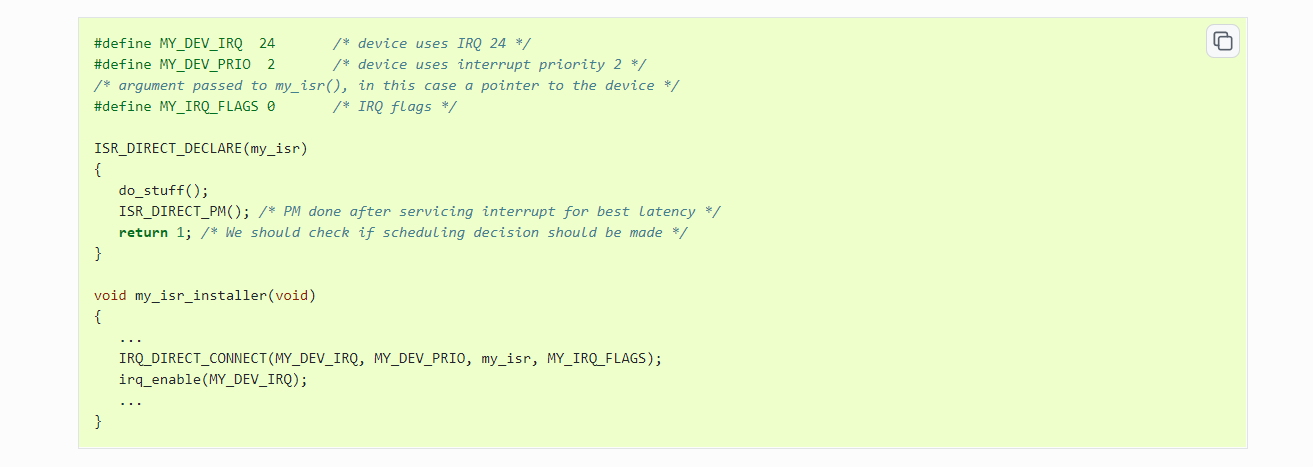
APP我们不用更改,只要把驱动中的IRQ_CONNECT();替换为IRQ_DIRECT_CONNECT();然后再加入zephy官方文档定义的代码:
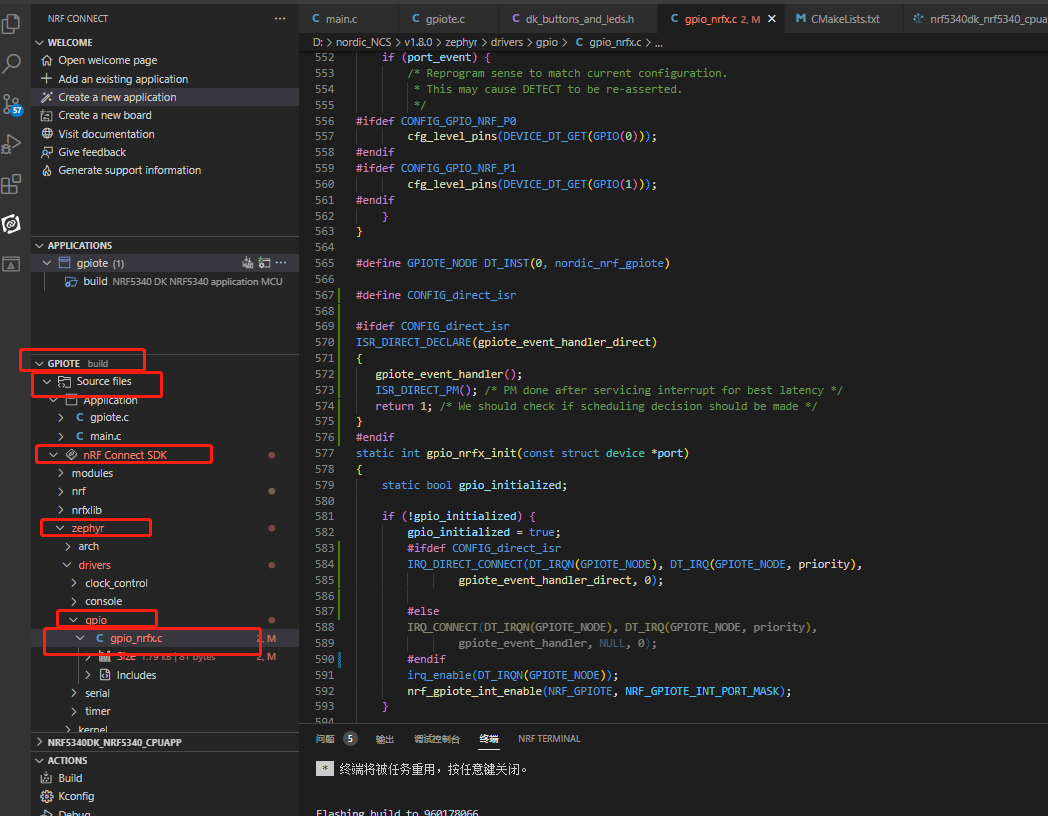
你可以在工程的如下地方找到这个文件,然后更改原始定义,更改后如下:
可以直接替换代码:
#define CONFIG_direct_isr #ifdef CONFIG_direct_isr ISR_DIRECT_DECLARE(gpiote_event_handler_direct) { gpiote_event_handler(); ISR_DIRECT_PM(); /* PM done after servicing interrupt for best latency */ return 1; /* We should check if scheduling decision should be made */ } #endif static int gpio_nrfx_init(const struct device *port) { static bool gpio_initialized; if (!gpio_initialized) { gpio_initialized = true; #ifdef CONFIG_direct_isr IRQ_DIRECT_CONNECT(DT_IRQN(GPIOTE_NODE), DT_IRQ(GPIOTE_NODE, priority), gpiote_event_handler_direct, 0); #else IRQ_CONNECT(DT_IRQN(GPIOTE_NODE), DT_IRQ(GPIOTE_NODE, priority), gpiote_event_handler, NULL, 0); #endif irq_enable(DT_IRQN(GPIOTE_NODE)); nrf_gpiote_int_enable(NRF_GPIOTE, NRF_GPIOTE_INT_PORT_MASK); } return 0; }
编译下载即可:
四、中断向量表查看
在如下目录可以看到我们的中断服务程序入口:其中21753就是本次中断ISR的如果地址:
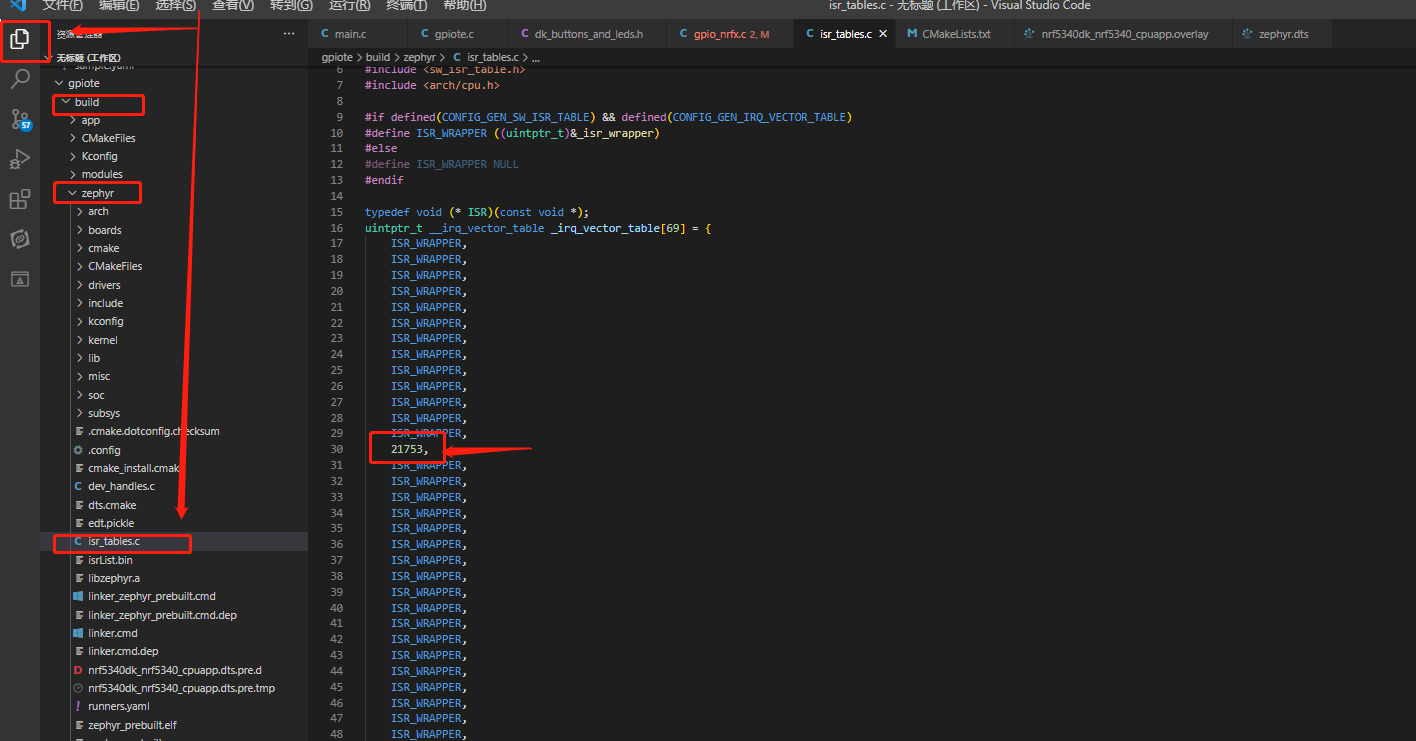
在这个数组下还有中断向量表,可以自行查看:
GPIO测试到此结束。如有错漏欢迎评论指正。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号