



冰球项目日志3-yjw
小组讨论
今天大家讨论了之前各自想的方案的问题,基本确定了寻找击球点的方案,以及击球手运动轨迹规划的方案,这里我只是简单的说下我们的击球点的确定方案。
击球策略方案
方案分析
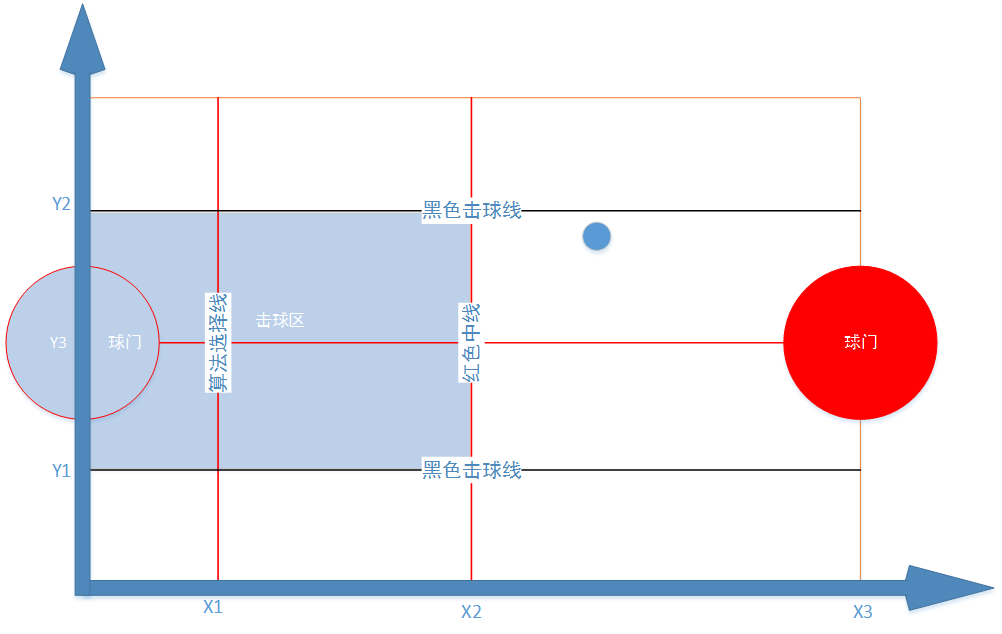
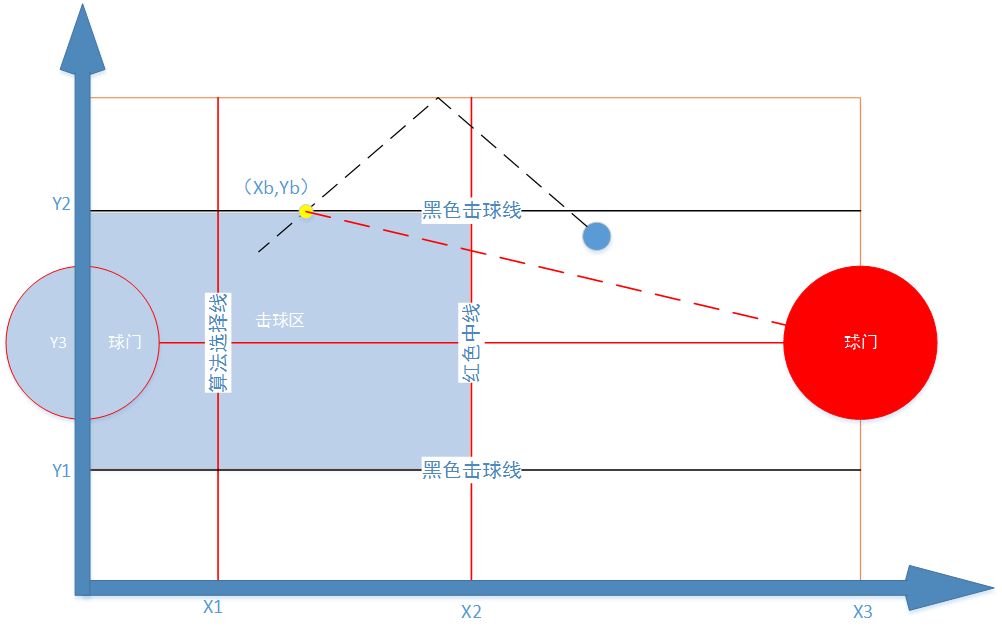
首先我们建立平面在直角坐标系,图中算法选择线为六等分线,是我们选择不同击球方案的一条分界线,我们的击球行为大部分发生在击球区,击球区的大小按照两条四等分线确定。
策略假定
1 假定不考虑对方击球手阻挡等情况
2 假定只考虑击球手速度对准冰球球心
3 假定必要时可以优先防守,再考虑进球
4 假定击球手击球时速度大小固定为最大速度
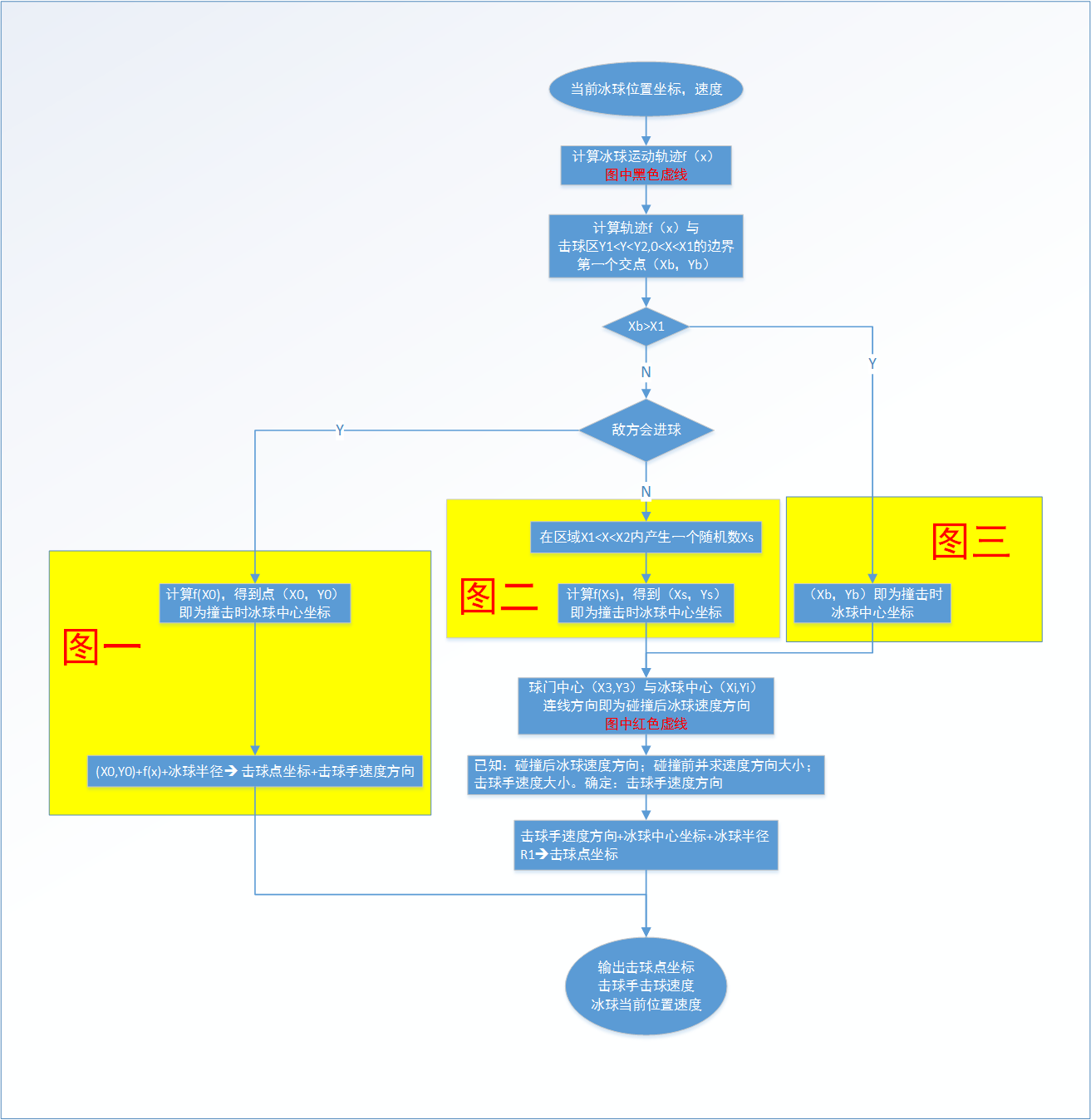
算法框图
方案图示
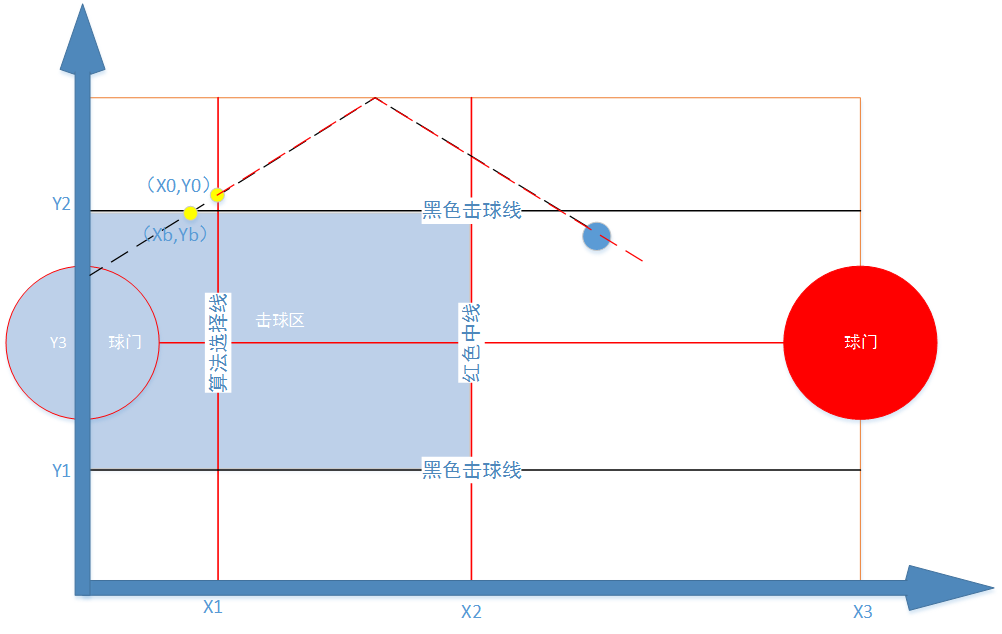
图一
当冰球轨迹曲线与击球区边界发生的第一个交点在算法分界线左侧,并且冰球按照轨迹会进入球门时,我们只做防守不进攻,将球沿原方向反向撞回。
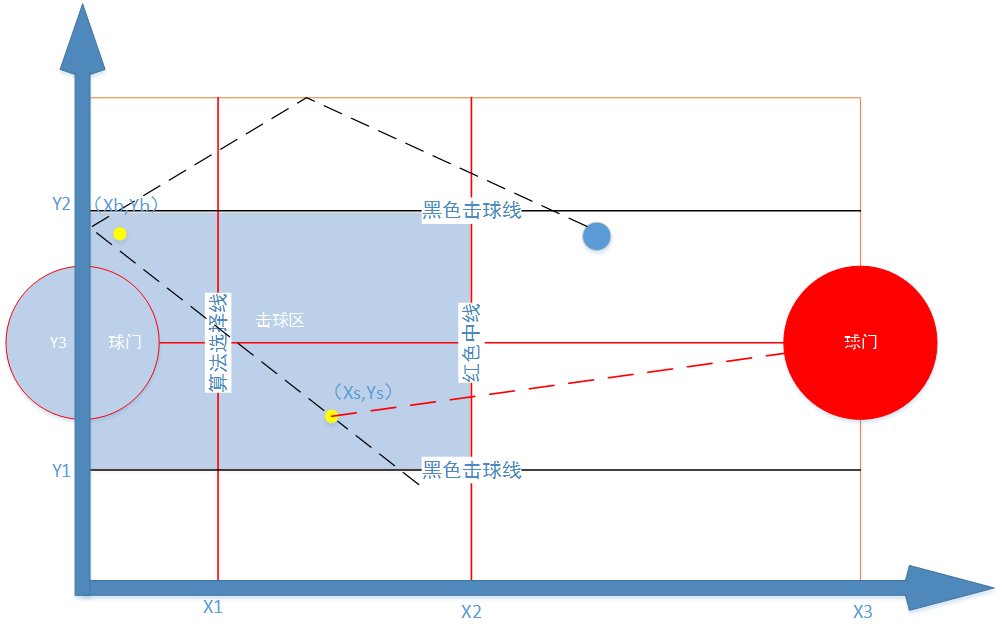
图二
当冰球轨迹曲线与击球区边界发生的第一个交点在算法分界线左侧,但冰球不会进入我方球门时,让冰球在我方球门壁反弹一次进入击球区,随机选择击球区内冰球运动轨迹上一点为撞击时冰球位置,然后根据速度矢量合成,确定击球点以及击球手速度。
图三
当冰球轨迹曲线与击球区边界发生的第一个交点在算法分界线右侧时,直接以该交点作为撞击时冰球中心,根据速度矢量合成,确定击球点以及击球手速度。
算法的问题
1 对于速度矢量合成过程中,击球手的速度大小和方向为一组相关的变量,方程组只能解出速度大小与方向的关系,所以我们是确定速度来定方向,但实际上应该是用最优解的思想,我们为了简化,没有进行分析。
2 我们有一个疑问:物理引擎组应该是做的如何模拟实际的物理碰撞过程,比如动量守恒,动能守恒等等。这样的话,我们策略寻找击球点过程中会遇到速度合成的问题,这样我们分析的时候直接把这些当作已知来用吗?
安排
如果方案没什么太大的问题,我们准备完善下框图,开始编程工作。
感受
感觉我们组单做这一个模块,编程不是很复杂,主要是方案的确定,以及和其他模块之间的接口定义的准确,这就要我们理解好各个模块之间的关系,但是我们感觉和物理引擎租的关系有那么一点儿模糊,就像上面问题说的,所以有点担心会弄错策略的含义。

