
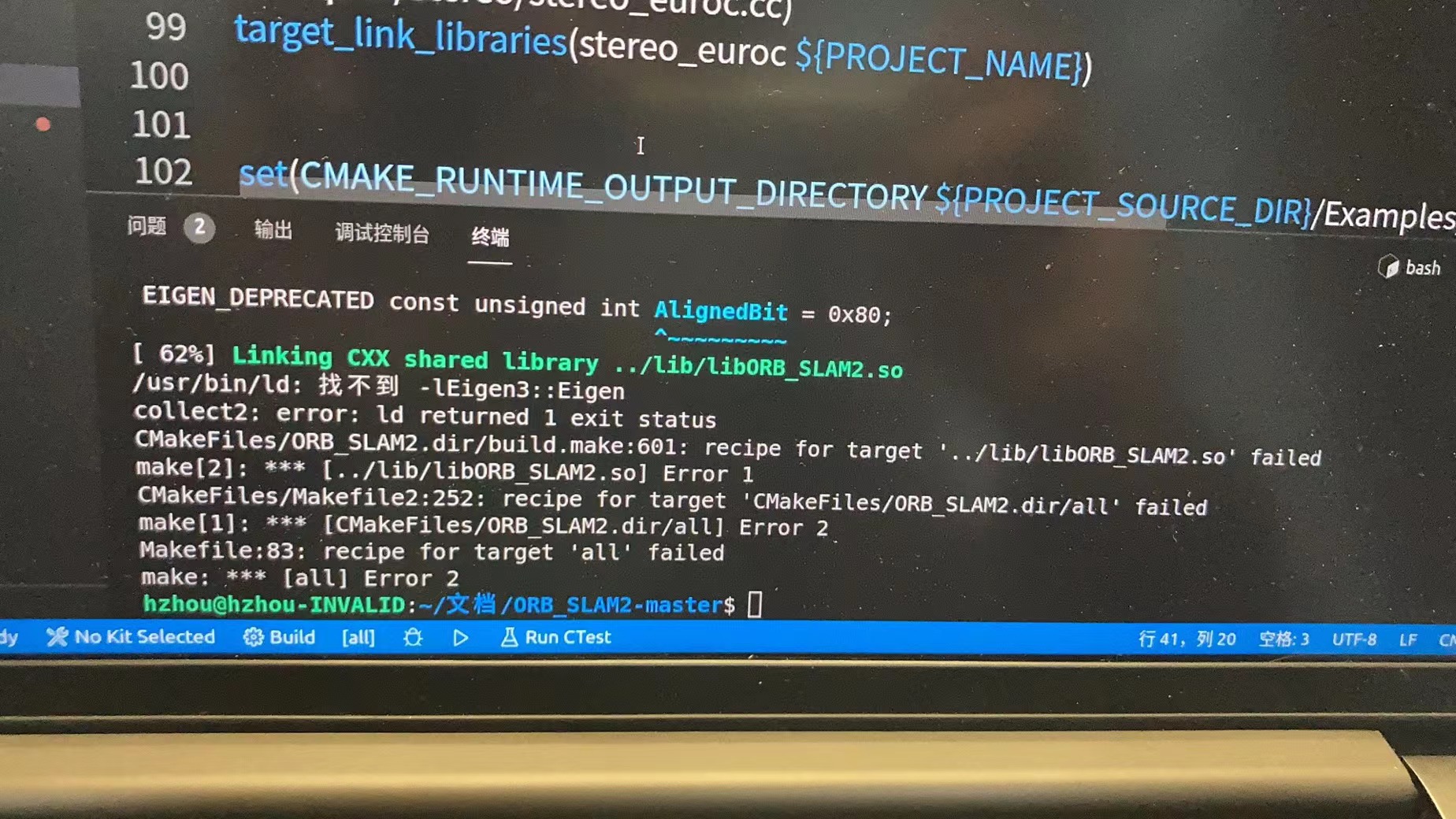
ORB SLAM2 编译报错 /usr/bin/ld:找不到 -lEigen3::Eigen
一开始是报的这个错误
然后就按照要求把原来的Eigen删了,装的是Eigen3.3.7,又卸载了原来的opencv装了opencv3.4.5,又装了pangolin v6
装完后报出这个错误,人都嘛了,一开始以为是因为给Eigen的原因,想着手动给CMakeLists中设置Eigen的路径,还是没有用....

想着时是不是自己源代码有问题,跑到ORB SLAM2的github中下了一波源代码,还是没有用...
濒临放弃,逛了一波issue,实在感谢这位大哥,我试了第一个就成功了,所以没有试第二种做法,

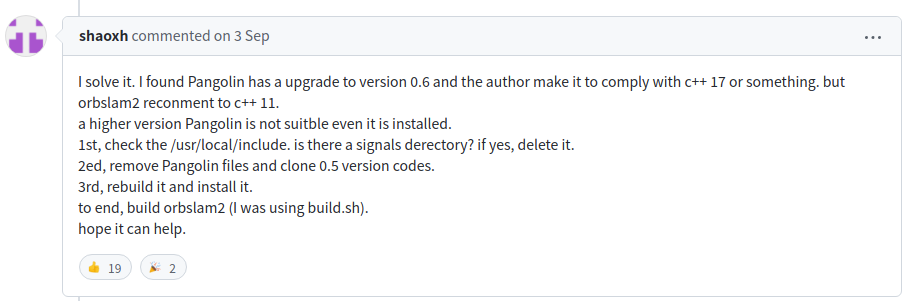
真是一顿操作猛如虎...
