c语言数字图像处理(九):边缘检测
背景知识
边缘像素是图像中灰度突变的像素,而边缘是连接边缘像素的集合。边缘检测是设计用来检测边缘像素的局部图像处理方法。
孤立点检测
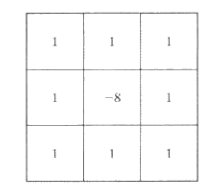
使用<https://www.cnblogs.com/GoldBeetle/p/9744625.html>中介绍的拉普拉斯算子
输出图像为
卷积模板
之前有过代码实现,这篇文章中不再进行测试
基本边缘检测
图像梯度
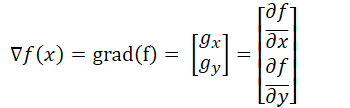
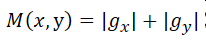
梯度向量大小

在图像处理过程中,因平方和和开方运算速度较慢,因此简化为如下计算方法
梯度向量方向与x轴夹角
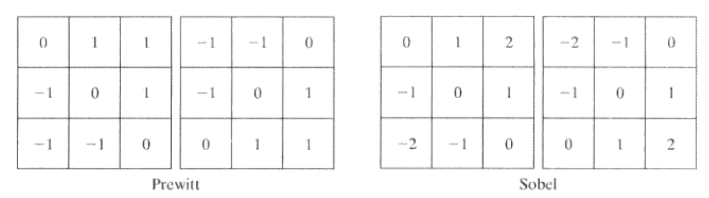
对应与不同的偏导数计算方法,得出边缘检测的不同模板
检测垂直或水平边缘

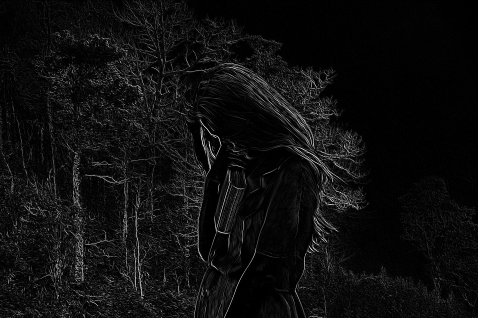
原图

使用Sobel模板检测水平边缘

使用Sobel模板检测垂直边缘
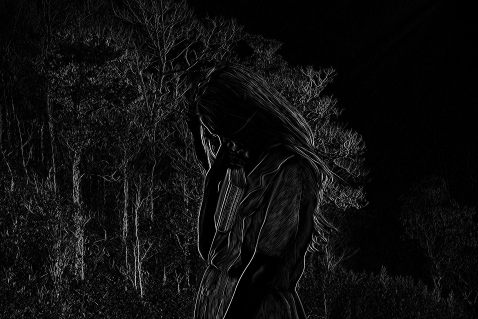
两者相加
代码实现
1 void edge_detection(short** in_array, short** out_array, long height, long width) 2 { 3 short gx = 0, gy = 0; 4 short** a_soble1; 5 short** a_soble2; 6 7 a_soble1 = allocate_image_array(3, 3); 8 a_soble2 = allocate_image_array(3, 3); 9 for (int i = 0; i < 3; i++){ 10 for (int j = 0; j < 3; j++){ 11 a_soble1[i][j] = soble1[i][j]; 12 a_soble2[i][j] = soble2[i][j]; 13 } 14 } 15 for (int i = 0; i < height; i++){ 16 for (int j = 0; j < width; j++){ 17 gx = convolution(in_array, i, j, height, width, a_soble1, 3); 18 gy = convolution(in_array, i, j, height, width, a_soble2, 3); 19 // out_array[i][j] = gx; 20 // out_array[i][j] = gy; 21 out_array[i][j] = gx + gy; 22 if (out_array[i][j] < 0) 23 out_array[i][j] = 0; 24 else if (out_array[i][j] > 0xff) 25 out_array[i][j] = 0xff; 26 } 27 } 28 free_image_array(a_soble1, 3); 29 free_image_array(a_soble2, 3); 30 }
检测对角边缘
Sobel 45°检测模板

Sobel -45°检测模板
两者相加
代码实现通上,只需替换模板值即可
Marr-Hildreth边缘检测算法
1. 对二维高斯函数进行取样,得高斯低通滤波器,对输入图像滤波,滤波器模板大小为大于等于6*σ的最小奇整数
算法实现
1 void generate_gaussian_filter(double** gaussian_filter, long sigma) 2 { 3 double x, y; 4 long filter_size = 6 * sigma + 1; 5 6 for (int i = 0; i < filter_size; i++){ 7 for (int j = 0; j < filter_size; j++){ 8 x = i - filter_size / 2; 9 y = j - filter_size / 2; 10 gaussian_filter[i][j] = exp(-1.0 * ((pow(x, 2) + pow(y, 2)) / 2 * sigma * sigma)); 11 } 12 } 13 }
2. 计算第一步得到图像的拉普拉斯,利用如下模板

算法实现
1 void laplace(short** in_array, short** out_array, long height, long width) 2 { 3 short** a_sharpen; 4 5 a_sharpen = allocate_image_array(3, 3); 6 for (int i = 0; i < 3; i++){ 7 for (int j = 0; j < 3; j++){ 8 a_sharpen[i][j] = sharpen[i][j]; 9 } 10 } 11 for (int i = 0; i < height; i++){ 12 for (int j = 0; j < width; j++){ 13 out_array[i][j] = convolution(in_array, i, j, height, width, a_sharpen, 3); 14 } 15 } 16 free_image_array(a_sharpen, 3); 17 }
运行结果

3. 寻找零交叉,对任意像素p,测试上/下,左/右,两个对角线四个位置,当有两对符号不同并且绝对值差大于某一阈值时为零交叉点
算法实现
1 int is_cross(short** in_array, long row, long column) 2 { 3 int cross_num = 0; 4 5 if (in_array[row-1][column-1] * in_array[row+1][column+1] < 0 && 6 abs(abs(in_array[row-1][column-1]) - abs(in_array[row+1][column+1])) > 0x66) 7 cross_num++; 8 if (in_array[row-1][column] * in_array[row+1][column] < 0&& 9 abs(abs(in_array[row-1][column]) - abs(in_array[row+1][column])) > 0x66) 10 cross_num++; 11 if (in_array[row-1][column+1] * in_array[row+1][column-1] < 0&& 12 abs(abs(in_array[row-1][column+1]) - abs(in_array[row+1][column-1])) > 0x66) 13 cross_num++; 14 if (in_array[row][column-1] * in_array[row][column+1] < 0&& 15 abs(abs(in_array[row][column-1]) - abs(in_array[row][column+1])) > 0x66) 16 cross_num++; 17 18 if (cross_num >= 2) 19 return 1; 20 else 21 return 0; 22 }
1 void marr(short** in_array, short** out_array, long height, long width) 2 { 3 long sigma = 2; 4 long filter_size = 6 * sigma + 1; 5 double** gaussian_filter; 6 short **gauss_array, **laplace_array; 7 8 gaussian_filter = allocate_double_array(filter_size, filter_size); 9 gauss_array = allocate_image_array(height, width); 10 laplace_array = allocate_image_array(height, width); 11 generate_gaussian_filter(gaussian_filter, sigma); 12 13 for (int i = 0; i < height; i++){ 14 for (int j = 0; j < width; j++){ 15 gauss_array[i][j] = convolutiond(in_array, i, j, height, width, gaussian_filter, filter_size); 16 } 17 } 18 printf("Gasuuian filter done\n"); 19 laplace(gauss_array, laplace_array, height, width); 20 printf("Laplace done\n"); 21 zero_cross(laplace_array, out_array, height, width); 22 printf("Zero cross done\n"); 23 24 free_double_array(gaussian_filter, filter_size); 25 free_image_array(gauss_array, height); 26 free_image_array(laplace_array, height); 27 }
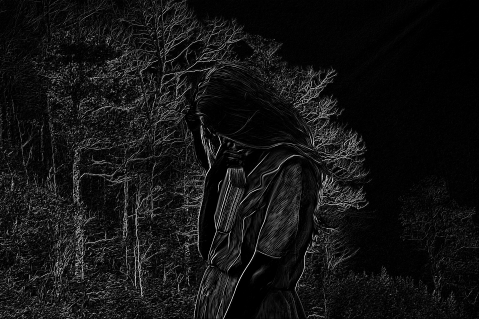
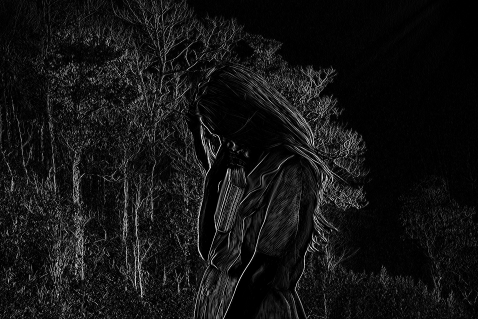
最终运行结果

可以看出,该算法检测出的边缘更加符合物体的真实边缘,但是这些边缘是由离散的点构成的,因此需要进行边缘连接来进一步加工,本文对此不再进行详述,读者有兴趣可以进行更加深入的研究。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号