
单纯形算法
单纯形算法
单纯形算法基于松弛形式进行操作:
其思路为:由于线性规划问题最优解一定可以在其可行域顶点处取得,所以先选一个初始点,之后不断尝试向相邻点去更新,如果更新不了就说明已经取得最优解了。
向相邻点更新的操作被称为转轴(Pivot),而不断迭代更新的过程则被称为单纯形(Simplex)。
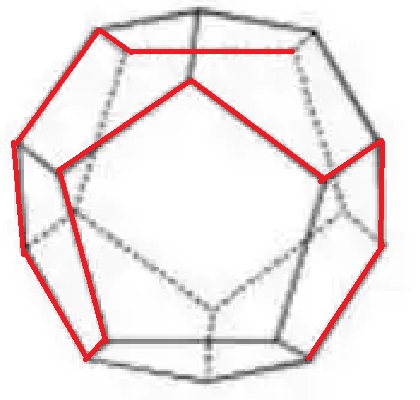
如图所示,红线显示了单纯形算法的流程。
因为凸集顶点个数有限,所以这个算法一定可以终止。
转轴
其作用为将一个非基变量和一个基变量交换。
形式为 \(Pivot(l,e)\),表示将 \(x_{l+n}\) 与 \(x_e\) 交换,由定义得前者为非基变量,后者为基变量。
具体操作如下:
原式为 \(x_{l+n}=b_l- \sum\limits_{j=1}^na_{ij}x_j,i=1,2,\dots,m\)
把代 \(x_e\) 的一项移到等式左边,吧 \(x_{l+n}\) 移到等式右边,得 \(a_{ie}x_e=b_l-x_{l+n}- \sum\limits_{j=1}^n [j=e] a_{ij}x_j,i=1,2,\dots,m\)
把 \(a_{ie}\) 除到等式右边,得 \(x_e=\frac{b_l-x_{l+n}- \sum\limits_{j=1}^n [j=e] a_{ij}x_j,i=1,2,\dots,m}{a_{ie}}\)
用所得式替换原式,就实现了交换非基变量和基变量的操作。
单纯形
单纯形的思路为不断找到一组 \((l,e)\) ,然后执行 \(Pivot(l,e)\)。
具体操作为:
- 找 \(e\):找到一个满足 \(c_e \ge 0\) 的非基变量 \(x_e\)
- 找 \(l\):找到满足 \(a_{le}>0\) 且 \(\frac{b_l}{a_{le}}\) 最小(约束最紧)的基变量 \(x_{l+n}\)
- 执行 \(Pivot(l,e)\)
- 不断执行1~3步直至终止
终止的情况有 2 种:
- 找不到一个 \(e\) 使得 \(c_e \ge 0\),证明此时已经找到了最优解。
- 找不到一个合法的 \(l\),证明此时最优解为无穷大,即线性规划问题可行域无界。这种情况不在我们讨论范围内。
初始化
初始化需要一个辅助线性规划:
如果原线性规划存在一个可行解 \((\hat{x}_{1},\hat{x}_{2},\dots,\hat{x}_{n+m})\),则辅助线性规划必然存在一个可行解 \((0,\hat{x}_{1},\hat{x}_{2},\dots,\hat{x}_{n+m})\)。又因为 \(x_0\ge 0\),所以该可行解为辅助线性规划的最优解。
之后只需要找到 \(l\) 使得 \(b_l\) 最小,然后执行 \(Pivot(l,0)\) 就得到了初始解。
时间复杂度分析
初始化的时间复杂度和单纯形的时间复杂度同阶,故只分析单纯形的时间复杂度。
不难理解一次 \(Pivot\) 的时间复杂度是 \(O(nm)\),而影响时间复杂度的关键在于 \(Simplex\) 执行 \(Pivot\) 的次数。
该次数期望执行 \(m\) 次。但不幸的是,其最坏执行次数与凸集顶点个数同阶,即指数级。Klee–Minty cube 就是一个将单纯形算法卡到指数级的例子

 浙公网安备 33010602011771号
浙公网安备 33010602011771号