

遥控图传部分调研报告和方案设计
一、遥控器组成部分参考选型
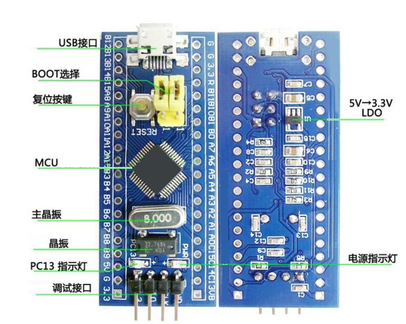
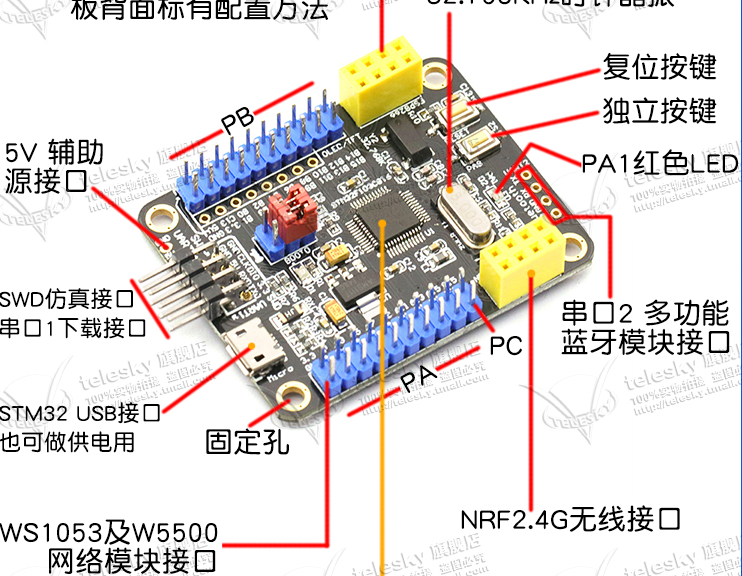
1.1 主控板
方案A:选用类似以下两种的最小系统板,然后自己画一个转线板,在转线板上面完成走线,这种方案的优点是开发周期快,需要解决的硬件上的问题比较少,难度小,缺点是不够系统化和工业化,做出来的东西可能仅限于实验阶段,不利于长期的开发和改版,后期增删东西的话会比较麻烦。
淘宝链接:https://item.taobao.com/item.htm?id=557010993725&ali_trackid=2:mm_28347190_2425761_109058700251:1600410730_248_76948741&spm=a231o.7712113%2Fg.1004.317&pvid=200_11.131.93.47_1468_1600393579592&bxsign=tbk160041073084724e640dceb05ee565121730b01ab7ad0
方案B: 采用网上开源的飞控遥控器主板,这种主板厂家提供的资料里面大部分都会有原理图,PCB的话可能厂家都不肯给,但是通过厂家给的原理图再自己开板的难度相对来说会容易很多,我们可以再这个基础上面增加我们特有的功能删除不需要的功能,下面是几款开源遥控器的图片和链接:

淘宝链接:https://item.taobao.com/item.htm?spm=a230r.1.14.66.1bbd7830phHaXt&id=569260172944&ns=1&abbucket=14#detail
此款遥控器的开源资料丰富,以此为基础开发我们自己的遥控器难度会大大降低,针对我们自身的情况可能开发工作量主要会在焊接和调试这块儿,如果板子有问题再重新开版可能会导致开发周期比较长,所以目前的想法是,先使用这款遥控器把我们的机器人和机械臂的控制部分调通,然后在开板的这段时间内,同时进行机器人控制部分的优化和机器人图传部分的设计。
其他类似的开源遥控器:

淘宝链接:https://item.taobao.com/item.htm?spm=a230r.1.14.166.1bbd7830phHaXt&id=600340748994&ns=1&abbucket=14#detail

淘宝链接:https://item.taobao.com/item.htm?spm=a230r.1.14.227.1bbd7830phHaXt&id=554954873889&ns=1&abbucket=14#detail
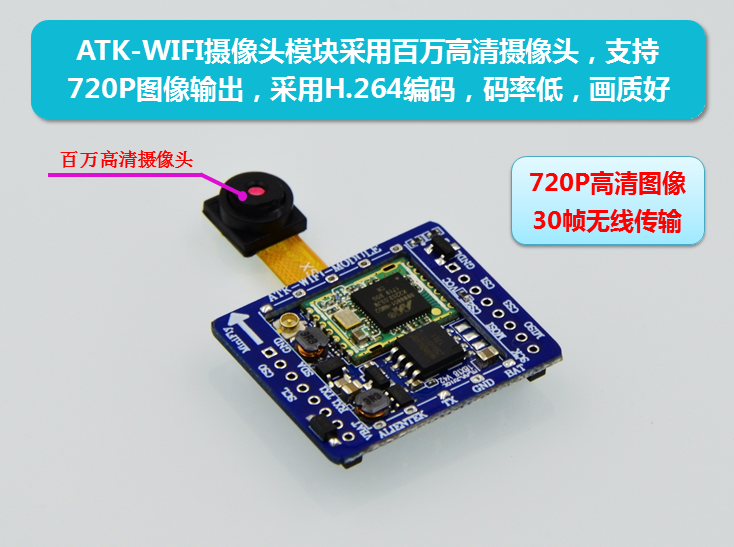
最后这款开源遥控器带有配套的航拍模块,也是开源的,720P像素 + 30帧,WIFI传输,接收部分的话可以考虑直接用手机WIFI接收显示,或者自己做一个显示器。不过它们给的这个模块传输距离太短了如果无法进行优化的话,可能不太适合我们项目。
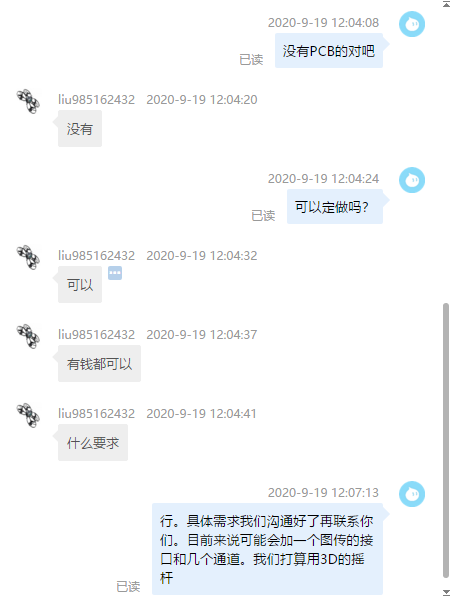
方案C:提出具体需求直接找厂家定做, 或者联系学校的朋友让他们找人帮我们做。
采用后面两种方案做出来会更加能够满足我们自己的需求,也利于后期的维护和改版。
1.2 NRF24L01
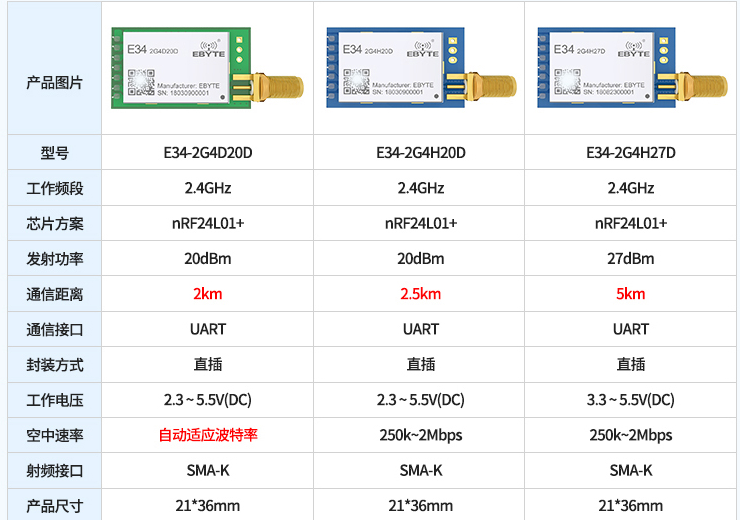
无论自己画板子或者使用模块组装都可以考虑使用这款24L01模块,这个传输距离远,稳定,支持重发,资料丰富,而且以前也用过。
淘宝链接:https://item.taobao.com/item.htm?id=42997097904&ali_trackid=2:mm_28347190_2425761_109058700251:1600263580_140_1775321990&spm=a2e1u.19484427.29996460.2&pvid=100_11.8.226.162_1645_271600263574267648&scm=null&bxsign=tbk16002635804944ed9a7650c0cef1c51ae1a495f3714ab
1.3 按键
三段式开关:负责切换控制模式
自复位按键:负责交互,功能选择,或者预留出来
自锁型按键:预留(可选)
1.4 摇杆
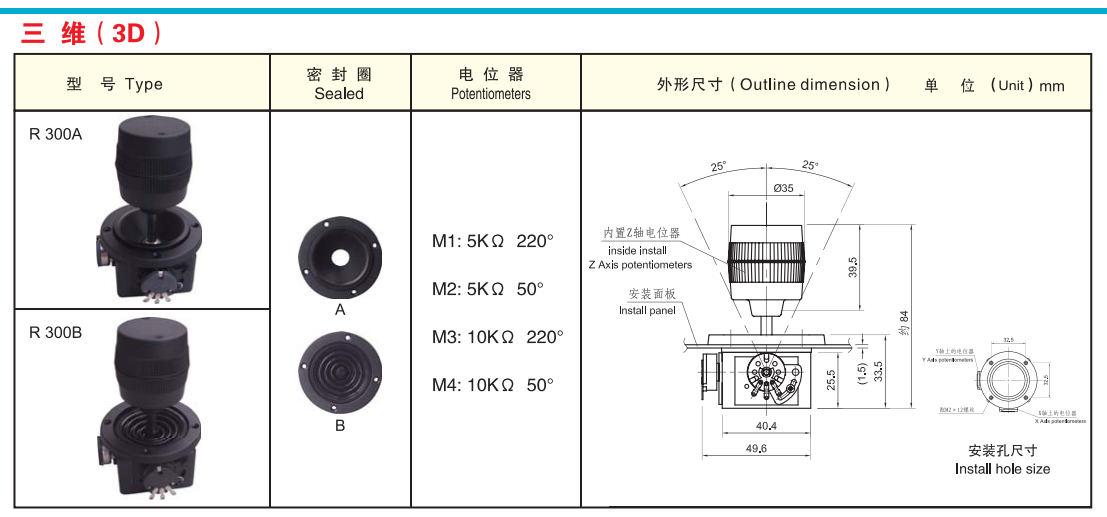
采用3D摇杆电位器:每个电位器3根线: 接 VCC, GND, 单片机AD引脚, 或者直接采用2D摇杆通过三段式开关来选择控制模式,感觉差别不是很大,一些多通道的遥控器都是采用开关切换的这种方式,也不会降低太多操作性,这部分作为可以在实现控制之后再考虑的优化问题。
1.5 电源部分
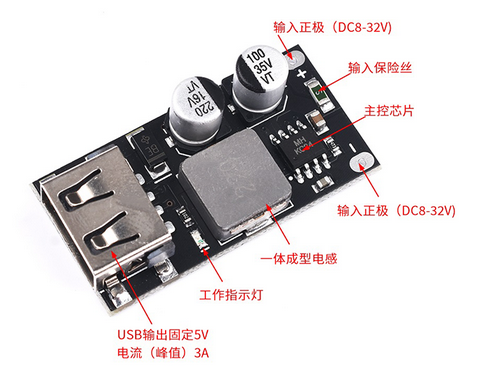
电池这部分主要考虑的应该是容量和充电这块,加显示器的话比较耗电,充电的话最好是USB直充,以前用过那些充电都需要把电池拆下来用充电器充,现在可以使用类似下面这种USB直充的。

https://item.taobao.com/item.htm?spm=a230r.1.14.17.74394745aLGuRD&id=586779763237&ns=1&abbucket=14#detail
https://item.taobao.com/item.htm?spm=a230r.1.14.41.296a69bdcnXtYO&id=622352598397&ns=1&abbucket=14#detail

https://item.taobao.com/item.htm?spm=a230r.1.14.28.296a69bdcnXtYO&id=615730245087&ns=1&abbucket=14#detail
1.5 图传部分
方案A: 采用摄像头 + 图像发送机 + 图像接收机 + 显示器的分离的方式,这个网上有很多,可以自由组合,但是很多距离好像都不够,需要注意传输距离和分辨率还有帧率这些,采用这种方式的话后面可以考虑将显示部分和遥控器做成一体机,显示部分完全自己做的话难度可能还是有点大,需要针对他们的传输协议自己找接收模块,可能涉及到图像解码这些,所以最好是找个尺寸大小合适的,能和遥控器安装到一起,但是不用自己写程序,跟遥控器在硬件上是完全独立的。
摄像头:

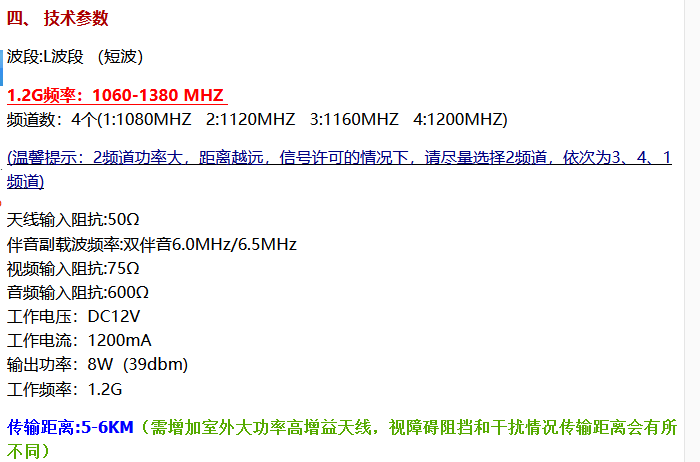
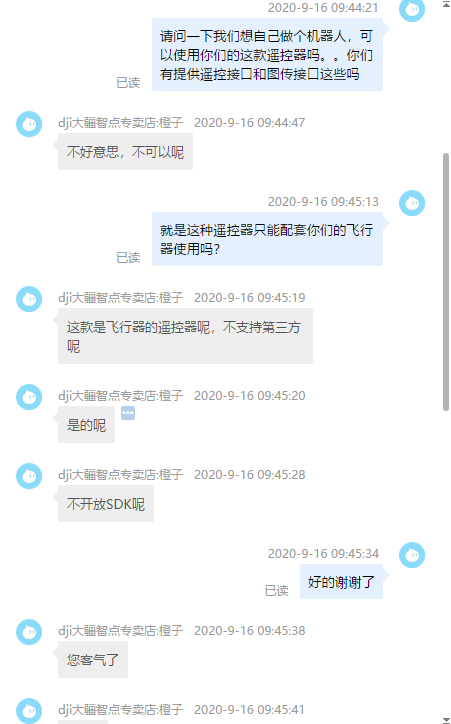
图传部分:

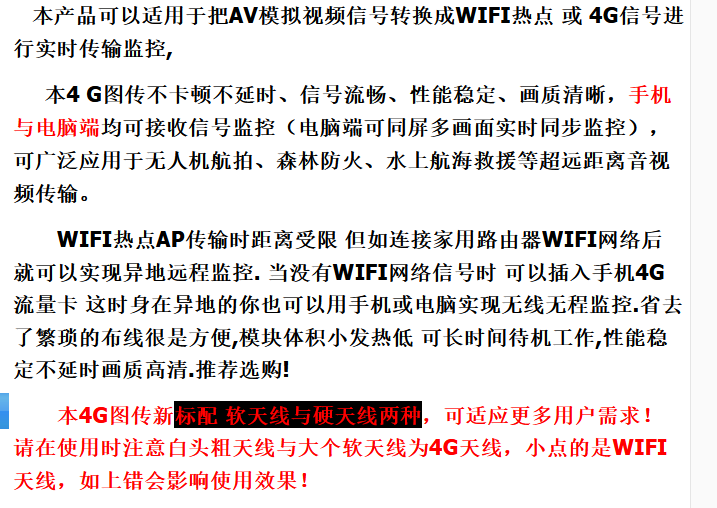
这款图传需要WIFI或者4G,网络稳定的时候,距离清晰度这些应该都不是问题。但是室外的话只有把图片传到手机上,这种方式只有把手机用个支架固定在遥控器上。

如果不使用网络的话上面这款应该是价格2000以内效果比较好的了,但是厂家说这款在陆地上有些遮挡的时候传输距离也只有几百米。这个的话就可以选个显示器,把显示器和遥控器一起做个外壳。
显示器:

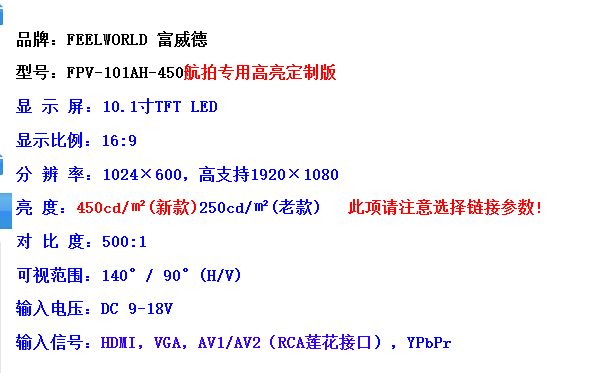
室外的话可以用这种显示器,这部分可以根据自己需求决定,一般选了图传之后显示器的话这个厂家一般都有,我们根据自己需求选就是了。
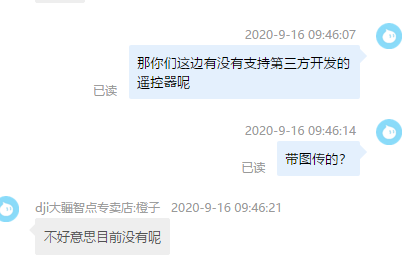
我问了一些厂家,很多飞控上的几千米的图传他们都不能保证陆地上的传输距离能达到1KM, 我提了需求让他们推荐了一些陆地上比较好用的,可能会比较适合我们项目的下面是选的一些比较合适的摄像头图传这些:
总结
目前来说的话我觉得我这边的可以先分为大致三个阶段:
第一个阶段的话,就直接买那种开源的遥控器,搭一个简易板的底盘盘,电机电调和主板买回来找块板子固定上然后用遥控器开始调基本的前进后退转向这些功能,机械臂的话就先按照你说的舵机单独控制。图传部分的话可能还需要具体商量下,需要进一步明白适用环境和具体需求。就目前调研的情况来说陆地上要实现高清晰度和远距离可能成本比较高。
第二个阶段的话,就可以开始考虑底盘的控制优化,和机械臂的联动控制,开始调图传部分,如果合适的话就把图传和遥控器做成一体机,不行的话可以先弄个支架把显示器固定上去,然后遥控部分可以开始自己画板子,用自己的板子进行调试。
第三个阶段就是一些功能的优化,整个机器人的联合调试,参数的测试等等。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号