
ArduPilot代码解读----EKF2(未完待续)
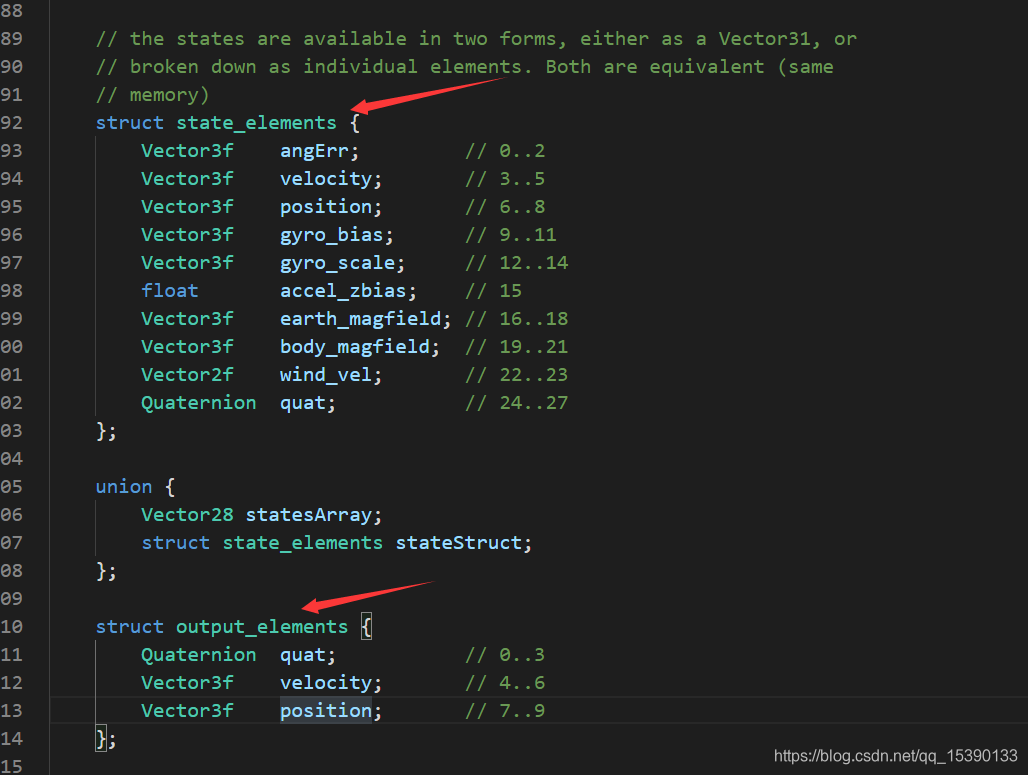
绝对是ArduPilot 的一大亮点,28个状态量,10个输出量。如下图所示:
备注:
- IMPORTANT: This article is about EKF1 which is deprecated since 2016 as EKF3 is introduced. It’s kept as a reference, as it has been the basis for EKF2 and EKF3. EKF2 is now the default.(EKF1自2016年弃用,现在EKF2为默认设置)
- estimate vehicle position, velocity and angular orientation based on rate gyroscopes, accelerometer, compass (magnetometer), GPS, airspeed and barometric pressure measurements
![在这里插入图片描述]()
下图为EKF作者的GitHub网站截图。
![作者github]()
这部分内容工作量太大了,看的一头雾水。目前先把关注点放在输入输出上。
1. 输出的有融合校正后的四元数,速度,以及位置。
2. 该方法基于陀螺仪,加速度计,罗盘,GPS,空速计,气压计估计出机体位置,速度以及旋转。
3. ArduPilot中先找出硬件中存在几组IMU,然后分别进行EKF,最后判断启用那组融合结果。达到冗余控制的效果。
参考:九天揽月带你玩转Ardupilot 的EKF2纸老虎(1)
牢记公式,ardupilot EKF2就是纸老虎(一)!
牢记公式,ardupilot EKF2就是纸老虎(二)!
牢记公式,ardupilot EKF2就是纸老虎(三)!
牢记公式,ardupilot EKF2就是纸老虎(四)!
牢记公式,ardupilot EKF2就是纸老虎(五)!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号