
ROS_yolo_PX4初尝试
跟风尝试下最近火热的Yolo,实现方法参考ROS下基于YOLO的px4无人机目标检测
PX4+mavros为常规配置,只需要添加对应的gazebo插件
在PX4固件中找到 Firmware/launch/mavros_posix_sitl.launch,修改其中的飞机模型,添加iris_stereo_camera,使得iris模型携带了一台双目相机,ROS中topic为:
/stereo/camera/left/camera_info
/stereo/camera/left/image_raw
/stereo/camera/right/camera_info
/stereo/camera/right/image_raw
配置Yolo
可以参考在ROS中实现基于darknet_ros的目标检测。我在https://gitee.com/gchasing/darknet_ros 中下载Yolo源码(官方为https://github.com/leggedrobotics/darknet_ros)。下载过程中自动下载权重包,而且ROS工程还自动编译了。过程相当慢!
然后,在darknet_ros/launch/darknet_ros.launch中修改:
<arg name="image" default="/stereo/camera/left/image_raw" />
接着修改darknet_ros/config/ros.yaml:
camera_reading:
topic: /stereo/camera/left/image_raw
然后运行:
roslaunch darknet_ros darknet_ros.launch
最终运行效果
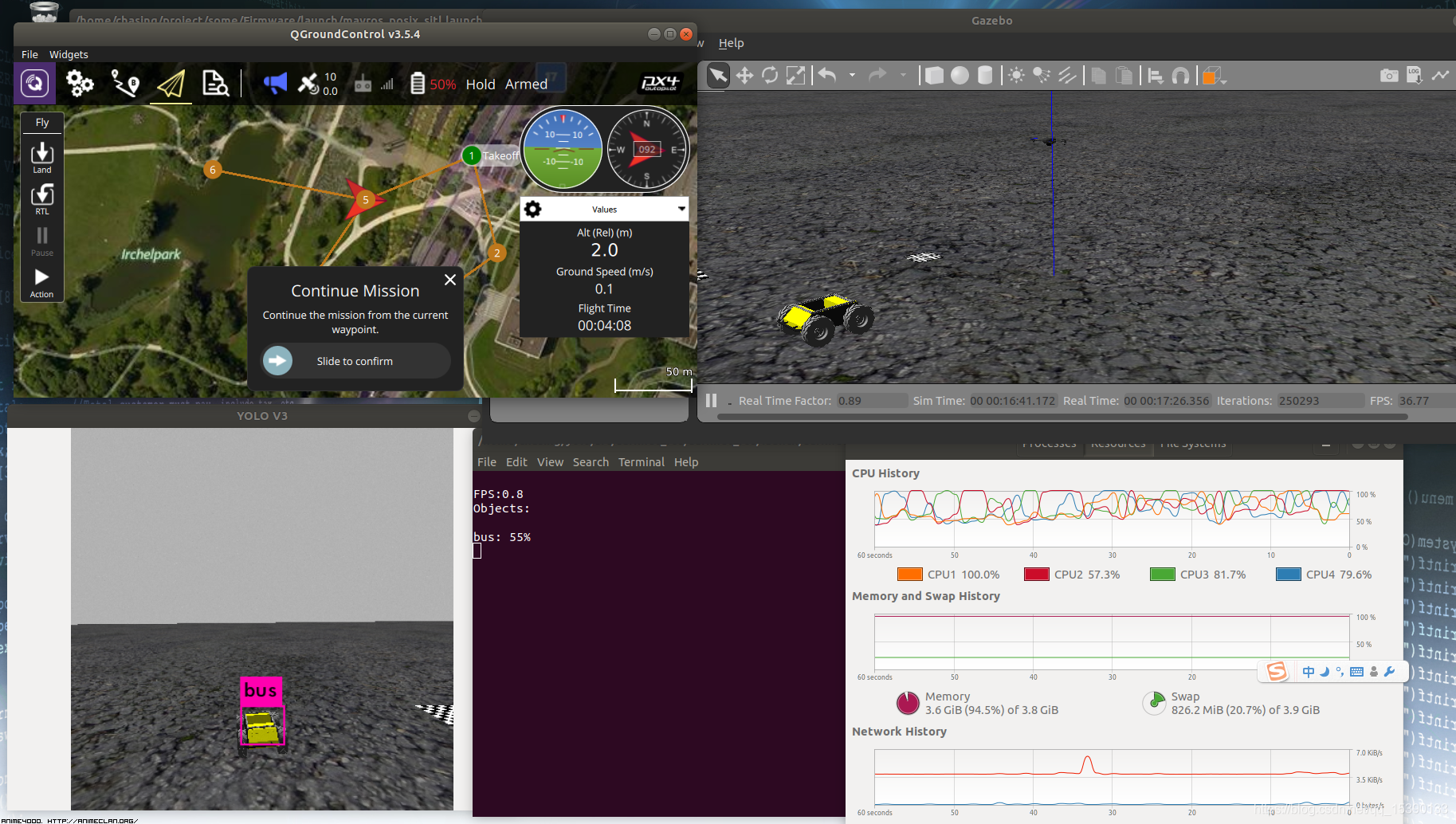
具体视频(录屏)请前往 ROS_PX4_yolo
总结:帧速率感人!CPU实在顶不住!识别准确度也不是很好!(不可否认,是在虚拟机下运行的)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号