PASCAL VOC数据集The PASCAL Object Recognition Database Collection
2016-02-29 14:07 GarfieldEr007 阅读(3620) 评论(0) 收藏 举报The PASCAL Object Recognition Database Collection
News
- 04-Apr-07: The VOC2007 challenge development kit is now available.
Objectives
- To compile a standardised collection of object recognition databases
- To provide standardised ground truth object annotations across all databases
- To provide a common set of tools for accessing and managing the database annotations
Standardising Each Database
- All images available in PNG format
- Annotated with ground truth
- Ground truth information in each annotated image includes a bounding box for the objects of interest and might also include pixel segmentation masks or polygonal boundaries. The class label provided by the authors who originally compiled the database is retained and a PASCAL class label added.
MATLAB Database Tools
- PASannotateimg.m - GUI tool to annotate an image and mark out objects of interest
- PASreadrecord.m - Load annotation information into MATLAB
- PASwriterecord.m - Write annotation information to disk
- PASviewannotation.m - Display annotated image and objects
The MATLAB database tools can be downloaded as tar.gz file
Jump to ...
- Fully Annotated Databases
- Partially Annotated Databases
- Unannotated Databases
Fully Annotated Databases
1.1 The TU Darmstadt Database (formerly the ETHZ Database)
| Authors | Bastian Leibe and Bernt Schiele |
| Institute | Darmstadt University of Technology |
| Database URL | http://www.mis.informatik.tu-darmstadt.de/leibe |
| PASCAL download | Download tar.gz file of annotated PNG images |
| Categories | Side views of motorbikes, cars and cows |
| Number of images | 115 motorbikes + 50 x 2 cars + 112 cows = 327 |
| Number of annotated images | 326 (cow-pic530-sml-lt discarded because of incorrect segmentation mask) |
| Object annotation statistics | 125 PASmotorbikeSide objects + 100 PAScarSide objects + 111 PAScowSide objects |
| Annotation notes | The original ground truth data provided by the authors is given in terms of bounding boxes for the motorbikes and pixel segmentation masks for the cows and the cars The original segmentation masks, which are non-binary RGB triplets, have been converted to PASCAL masks (0=background, 1=object) by converting the colour masks to grey scale values between 0 and 255 and then thresholding at 128 |
| Browse | Browse all images |
| Acknowledgements | Cow data provided by Derek Magee, University of Leeds. This work has been part of the CogVis project, funded in part by the Commission of the European Union (IST-2000-29375), and the Swiss Federal Office for Education and Science (BBW 00.0617) |
| Publications | B. Leibe, A. Leonardis and B. Schiele. Combined object categorization and segmentation with an implicit shape model. InProceedings of the Workshop on Statistical Learning in Computer Vision. Prague, Czech Republic, May 2004. Bibtex source | Download in pdf format D. Magee and R. Boyle. Detecting Lameness using "Re-sampling Condensation" and "Multi-stream Cyclic Hidden Markov Models." Image and Vision Computing, vol 20(8), pp 581-594, 2002. |
    |
    |
    |
Database variability and level of difficulty for objection recognition:
- The database has side views of 50 cars which have been mirrored to give a total of 100. All cars have roughly the same scale and occur in the centre of the image. There is only one car per image
- All cows have roughly the same scale and orientation (side view, facing left)
- The 111 cow images have only 3 distinct backgrounds and many of the cow images are quite similar to at least one other cow image in the database
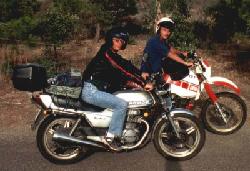
- The motorbike images are more varied and include everyday scenes of people riding their bikes in cluttered environments
- The motorbikes appear at different scales, can have large illumination changes, can have partial occlusion and there can be multiple instances per image
- The annotations are fairly comprehensive as all visible cows and cars, and most motorbikes, have been labelled
1.2 The UIUC Image Database for Car Detection
| Authors | Shivani Agarwal, Aatif Awan and Dan Roth |
| Institute | University of Illinois at Urbana-Champaign |
| Database URL | http://l2r.cs.uiuc.edu/~cogcomp/Data/Car/ |
| PASCAL download | Download tar.gz file of annotated PNG images |
| Categories | Side views of cars, negative examples (images without cars) |
| Number of images | 550 training cars + 170 test cars + 108 multi-scale test cars + 500 negative training examples = 1328 |
| Number of annotated images | 1328 |
| Object annotation statistics | 889 PAScarSide objects + 500 PASbackground objects |
| Annotation notes | The original ground truth data provided by the authors is given in terms of bounding boxes for the cars All cars have been assigned the label PAScarSide Some test images have multiple cars Following the original annotations, bounding boxes which lie outside the image have not been clipped All negative examples have been assigned the label PASbackground (with the original label field being set to "Not carSide") and their bounding boxes have been set to the image dimensions |
| Browse | Browse all images |
| Acknowledgements | This research, including the collection of this database, was supported by NSF grants ITR IIS 00-85980 and ITR IIS 00-85836 |
| Publications | S. Agarwal and D. Roth. Learning a sparse representation for object detection. In Proceedings of the European Conference on Computer Vision, volume 4, pages 113--130. Copenhagen, Denmark, May 2002. Springer-Verlag. Bibtex source | Download in pdf format S. Agarwal, A. Awan and D. Roth. Learning to detect objects in images via a sparse, part-based representation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 26(11):1475--1490, November 2004. Bibtex source | Download in pdf format |
    |
    |
Database variability and level of difficulty for objection recognition:
- The database has only a single object category
- Only side views of cars are present and the database has no rotated or frontal / rear views
- The database does have 108 images with scale variations though the aspect ratio (y/x) of the bounding box always equals 0.4
- However, most cars in the database occur at a single fixed scale
- The images are fairly clean with little occlusion. However, there is a small amount of background clutter
- For the 550 training images, the car is always the dominant object present in the middle of the image and occurring at a fixed scale. Thus, these images are good for training, but not for testing.
- The annotations are comprehensive as all visible cars have been labelled
1.3 The VOC 2005 Database: Dataset 1
| Authors | Mark Everingham (Compiled by) |
| Institute | University of Oxford |
| Database URL | http://www.pascal-network.org/challenges/VOC/databases.html |
| PASCAL download | Download tar.gz file of annotated PNG images |
| Categories | Views of motorbikes, bicycles, people, and cars in arbitrary pose. |
| Number of images | 1578 |
| Number of annotated images | 1578 |
| Object annotation statistics | Total number of labelled objects = 2209 |
| Annotation notes | The images in this database are a subset of the other image databases on this page. The images were manually selected as an "easier" dataset for the 2005 VOC challenge. Annotations were taken verbatim from the source databases. |
| Browse | Browse all images |
| Acknowledgements | Images in this database were taken from the TU-Darmstadt, Caltech, TU-Graz and UIUC databases. Additional images were provided by INRIA. Funding was provided by PASCAL. |
| Publications | M. Everingham, A. Zisserman, C. K. I. Williams, L. Van Gool, et al. The 2005 PASCAL Visual Object Classes Challenge. InMachine Learning Challenges. Evaluating Predictive Uncertainty, Visual Object Classification, and Recognising Textual Entailment., eds. J. Quinonero-Candela, I. Dagan, B. Magnini, and F. d'Alche-Buc, LNAI 3944, pages 117-176, Springer-Verlag, 2006. Download in pdf format |
    |
    |
    |
    |
1.3 The VOC 2005 Database: Testset 2
| Authors | Mark Everingham |
| Institute | University of Oxford |
| Database URL | http://www.pascal-network.org/challenges/VOC/databases.html |
| PASCAL download | Download tar.gz file of annotated PNG images |
| Categories | Views of motorbikes, bicycles, people, and cars in arbitrary pose. |
| Number of images | 654 |
| Number of annotated images | 654 |
| Object annotation statistics | Total number of labelled objects = 1293 |
| Annotation notes | These images were collected from Google for the 2005 VOC challenge. The images were chosen to provide a "harder" test set for the challenge. All images are annotated with instances of all four categories: motorbikes, bicycles, people and cars. |
| Browse | Browse all images |
| Acknowledgements | Funding was provided by PASCAL. |
| Publications | M. Everingham, A. Zisserman, C. K. I. Williams, L. Van Gool, et al. The 2005 PASCAL Visual Object Classes Challenge. InMachine Learning Challenges. Evaluating Predictive Uncertainty, Visual Object Classification, and Recognising Textual Entailment., eds. J. Quinonero-Candela, I. Dagan, B. Magnini, and F. d'Alche-Buc, LNAI 3944, pages 117-176, Springer-Verlag, 2006. Download in pdf format |
    |
    |
    |
    |
1.4 The VOC 2006 Database
| Authors | Mark Everingham (Compiled by) |
| Institute | University of Oxford |
| Database URL | http://www.pascal-network.org/challenges/VOC/databases.html |
| PASCAL download | Download tar file of annotated PNG images: train+val sets Download tar file of annotated PNG images: test set |
| License | By downloading the test data you are agreeing to abide by the licenses for the "flickr" and Microsoft Research Cambridge images contained in the database: "flickr" terms of use MSR Cambridge License (RTF) Details of the contributor of each image can be found in the file "contrib.txt" included in the database. |
| Categories | Views of bicycles, buses, cats, cars, cows, dogs, horses, motorbikes, people, sheep in arbitrary pose. |
| Number of images | 5,304 |
| Number of annotated images | 5,304 |
| Object annotation statistics | Total number of labelled objects = 9,507 |
| Annotation notes | These images were collected from personal photographs, "flickr", and the Microsoft Research Cambridge database for the 2006 VOC challenge. All images are annotated with instances of all ten categories: bicycles, buses, cats, cars, cows, dogs, horses, motorbikes, people, sheep. Guidelines used for the annotation are available here. |
| Browse | Browse all images |
| Acknowledgements | Funding was provided by PASCAL. Images were contributed and/or annotated by Moray Allen, James Bednar, Matthijs Douze, Mark Everingham, Stefan Harmeling, Juan Huo, Lindsay Hutchison, Fiona Jamieson, Maria-Elena Nilsback, John Quinn, Florian Schroff, Kira Smyllie, Mark Van Rossum, Chris Williams, John Winn, Andrew Zisserman. |
| Publications | Bibtex source | Download in pdf format M. Everingham, A. Zisserman, C. K. I. Williams, L. Van Gool. The 2006 PASCAL Visual Object Classes Challenge (VOC2006) Results. http://www.pascal-network.org/challenges/VOC/voc2006/results.pdf. |
    |
    |
    |
    |
    |
    |
    |
    |
    |
    |
Partially Annotated Databases
2.1 The Caltech Database
| Authors | Rob Fergus and Pietro Perona |
| Institute | California Institute of Technology |
| Database URLs | http://www.robots.ox.ac.uk/~vgg/data3.html http://www.vision.caltech.edu/html-files/archive.html |
| PASCAL download | Download tar.gz file of annotated PNG images |
| Categories | Profile views of aeroplanes and motorbikes, rear views of cars, car backgrounds, front views of faces and general background scenes |
| Number of images | 1074 aeroplanes + 1155 cars + 450 faces + 826 motorbikes + 1370 car backgrounds + 900 general backgrounds = 5775 |
| Number of annotated images | 4620 |
| Object annotation statistics | Total number of labelled objects = 1293 |
| Annotation notes | The original ground truth data provided by the authors is given in terms of a bounding quadrilateral which is converted into a bounding rectangle Following the original annotations, in some cases only one object per image is labelled even though there are multiple instances present. |
| Browse | Browse images selected for annotation |
| Acknowledgements | Funding was provided by the UK EPSRC; Caltech Center for Neuromorphic Systems Engineering and EC CogViSys project. Michalis Titsias annotated the car images. |
| Publications | R. Fergus, P. Perona and A. Zisserman. Object Class recognition by unsupervised scale-invariant learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, volume 2, pages 264--271. Madison, Wisconsin, June 2003. Bibtex source | Download in pdf format |
    |
    |
    |
    |
    |
Database variability and level of difficulty for objection recognition:
- The database has many images for each object allowing for sufficient intra-class variability
- However, there is very little pose, orientation, scale or illumination variation in the images
- There is almost no occlusion and only a limited number of images have background clutter
- The object of interest generally tends to occur in the middle of the image and can quite often fill the image
- For some categories only one object has been labelled per image even though there are multiple objects present
2.2 The MIT-CSAIL Database of Objects and Scenes
| Authors | Antonio Torralba, Kevin P. Murphy and William T. Freeman |
| Institute | Massachusetts Institute of Technology |
| Database URL | http://web.mit.edu/torralba/www/database.html |
| PASCAL download | Download tar.gz file of annotated PNG images: part 1, part 2 |
| Categories | 107 object classes and 18 region classes |
| Number of images | Over 72,000 |
| Number of annotated images | 2873 |
| Object annotation statistics | Total number of labelled objects = 10,358. View number of objects in each class |
| Annotation notes | The original ground truth data provided by the authors is given in terms of boundary polygons for each labelled object Some very minor errors in the original annotations relating to image sizes and colour depth have been corrected All the original object labels have been retained. Their PASCAL equivalents are obtained by adding a PAS in front of them 180 of the original annotated images which did not contain any objects have been assigned the label PASbackground |
| Browse | Browse, by subdirectory, images selected for annotation Browse, by object class, images selected for annotation |
| Acknowledgements | Egon Pasztor made many contribution in the early stages of the database. We also want to give thanks to the flight delays and specially to the bad television programs who motivated us very much into annotating more images every day |
| Publications | A. Torralba, K. P. Murphy and W. T. Freeman. Sharing features: efficient boosting procedures for multiclass object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, volume 2, pages 762--769. Washington, DC, June 2004. Bibtex source | Download in pdf format |
    |
    |
Database variability and level of difficulty for objection recognition:
- The database has many different objects taken under a variety of viewing and illumination conditions
- The images have been taken from different sources such as web cams, digital cameras and over the web
- While the annotations are generally of a good quality, they can sometimes lack consistency in the labelling and some instances of objects have been missed altogether when performing the annotations
2.3 The TU Graz-02 Database
| Authors | Andreas Opelt and Axel Pinz |
| Institute | Graz University of Technology |
| Database URL | http://www.emt.tugraz.at/~pinz/data/GRAZ_02/ |
| PASCAL download | Download tar.gz file of annotated PNG images |
| Categories | Bikes, cars, people and backgrounds |
| Number of images | 365 bikes + 420 cars + 311 people + 380 negative examples = 1476 |
| Number of annotated images | 1280 |
| Object annotation statistics | 404 PASbicycle objects + 451 PAScar + 581 PASperson objects + 380 PASbackground objects |
| Annotation notes | The original ground truth data provided by the authors is given in terms of pixel segmentation masks The original masks have values between 0 and 255. These are converted to PASCAL masks (0 = background, 1 = 1st object, 2 = 2nd object, etc.) by (a) setting all values greater than 0 as background, (b) finding the connected components of the foreground and (c) rejecting all components smaller than 100 pixels. Following the original annotations, overlapping objects have been merged into a single object while disconnected objects parts have been labelled as separate objects. The original negative examples had been labelled as "none". These are now labelled as PASbackground with the bounding box set to the dimensions of the image. |
| Browse | Browse images selected for annotation |
| Acknowledgements | The EU project LAVA (IST-2001-34405) and the Austrian Science Foundation (project S9103-N04) |
| Publications | A. Opelt, M. Fussenegger, A. Pinz and P. Auer. Generic object recognition with boosting. Technical Report TR-EMT-2004-01, EMT, TU Graz, Austria, 2004. Submitted to the IEEE Transactions on Pattern Analysis and Machine Intelligence. Bibtex source | Download in pdf format A. Opelt and A. Pinz. Object localization with boosting and weak supervision for generic object recognition. InProceedings of the 14th Scandinavian Conference on Image Analysis (SCIA). Bibtex source | Download in pdf format |
    |
    |
    |
Database variability and level of difficulty for objection recognition:
- The database has only three classes.
- However, images from each class display a large variability in scale, viewpoint and illumination.
- There are significant occlusions and background clutter.
- There is a large intra-class variability within the objects.
- Often, the objects of interest are not the dominant objects in the scene.
- The annotations are quite comprehensive and most objects of interest have been marked.
Unannotated Databases
3.1 101 Object Categories
| Authors | Fei-Fei Li, Marco Andreetto and Marc'Aurelio Ranzato |
| Institute | California Institute of Technology |
| Database URL | http://www.vision.caltech.edu/feifeili/101_ObjectCategories/ |
| PASCAL download | Download tar.gz file of unannotated PNG images |
| Categories | 101 object classes |
| Number of images | 9197 |
| Browse | Browse unannotated images from the database |
| Publications | L. Fei-Fei, R. Fergus, and P. Perona. Learning generative visual models from few training examples: an incremental Bayesian approach tested on 101 object categories. In Proceedings of the Workshop on Generative-Model Based Vision. Washington, DC, June 2004. Bibtex source | Download in pdf format |
    |
    |
from: http://host.robots.ox.ac.uk/pascal/VOC/databases.html#VOC2005_1

 浙公网安备 33010602011771号
浙公网安备 33010602011771号