
图论入门(完结)
更新线
- 图的基本概念(已更)
- 图的存储结构(邻接矩阵、邻接表、链式前向星)(已更)
- 图的遍历(深度优先、广度优先)(已更)
- 一笔画问题(欧拉回路,已更)
- 哈密顿路问题(已更)
- 最短路径(已更)
- 最小生成树(已更)
图论简介及相关概念
图
(
g
r
a
p
h
)
(graph)
(graph) 是一个二元组
G
=
(
V
(
G
)
,
E
(
G
)
)
G=(V(G),E(G))
G=(V(G),E(G)),其中
V
(
G
)
V(G)
V(G)是非空集,称为点集
(
v
e
r
t
e
x
s
e
t
)
(vertex set)
(vertexset),对于
V
V
V中的每个元素,我们称其为顶点
(
v
e
r
t
e
x
)
(vertex)
(vertex)或节点
(
n
o
d
e
)
(node)
(node),简称点,
E
(
G
)
E(G)
E(G)为
V
(
G
)
V(G)
V(G)各结点之间边的集合,称为边集
(
e
d
g
e
s
e
t
)
(edge set)
(edgeset)
常用
G
=
(
V
,
E
)
G=(V,E)
G=(V,E) 表示图
- 当 V , E V,E V,E都是有限集合时,称 G G G为有限图
- 当 V V V或 E E E都是有限集合时,称 G G G为无限图
图有多种,包括无向图 ( u n d i r e c t e d g r a p h ) (undirected graph) (undirectedgraph),有向图 ( d i r e c t e d g r a p h ) (directed graph) (directedgraph),混合图 ( m i x e d g r a p h ) (mixed graph) (mixedgraph),带权图 等
举个例子
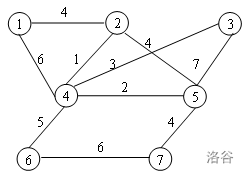
无向图专业术语
- 两个顶点之间如果有边连接,那么就视为两个顶点相邻
- 路径:相邻顶点的序列
- 圈:起点和终点重合的路径
- 连通图:任意两点之间都有路径连接的图
- 度:顶点连接的边数叫做这个顶点的度
- 树:没有圈的连通图
- 森林:没有圈的非连通图
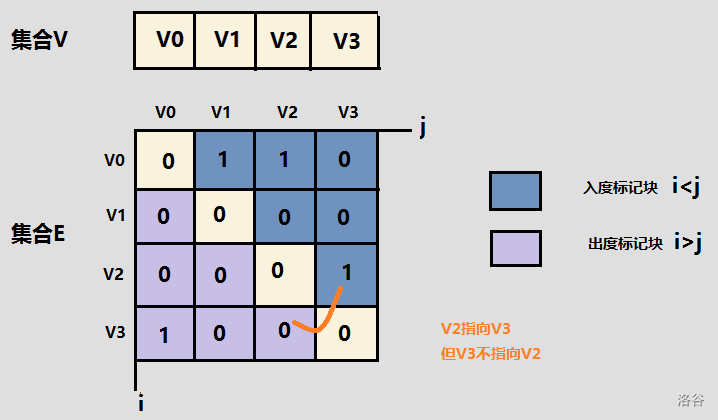
有向图专业术语
- 在有向图中,边是单向的:每条边所连接的两个顶点是一个有序对,他们的邻接性是单向的
- 有向路径:相邻顶点的序列
- 有向环:一条至少含有一条边且起点和终点相同的有向路径
- 有向无环图 ( D A G ) (DAG) (DAG):没有环的有向图
- 度:一个顶点的入度与出度之和称为该顶点的度
1 ) ) ).入度:以顶点为弧头的边的数目称为该顶点的入度
2 ) ) ).出度:以顶点为弧尾的边的数目称为该顶点的出度
图的存储方式
1.邻接矩阵
方法:对于一个有 V V V的顶点的图而言,可以使用 V ∗ V V*V V∗V的二维数组表示 G [ i ] [ j ] G[i][j] G[i][j]表示的是顶点 i i i与顶点 j j j的关系。如果顶点 i i i和顶点 j j j之间有边相连, G [ i ] [ j ] = 1 G[i][j]=1 G[i][j]=1如果顶点 i i i和顶点 j j j之间无边相连, G [ i ] [ j ] = 0 G[i][j]=0 G[i][j]=0,对于无向图: G [ i ] [ j ] = G [ j ] [ i ] G[i][j]=G[j][i] G[i][j]=G[j][i]
代码实现:
bool adj[MAXN][MAXN];
scanf("%d %d", &n , &m);
for (int i = 1 ; i <= m ; i ++) {
int u , v;
scanf("%d %d", &u , &v);
adj[u][v] = 1;
adj[v][u] = 1;
}
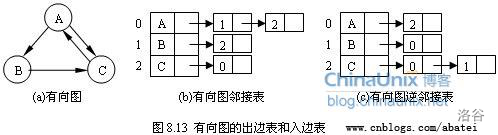
2.邻接表
方法:使用一个支持动态增加元素的数据结构构成的数组,如 v e c t o r vector vector< i n t int int> a d j [ n + 1 ] adj[n + 1] adj[n+1] 来存边,其中 a d j [ u ] adj[u] adj[u]存储的是点的所有出边的相关信息 ( ( (终点、边权等 ) ) )
代码实现:
struct node{
vector<int> v;
}a[MAXN];
for (int i = 1 ; i <= m ; i ++) {
int u , v;
scanf("%d %d", &u , &v);
a[u].v.push_back(v);
a[v].v.push_back(u);
}
return 0;
3.链式前向星
方法:
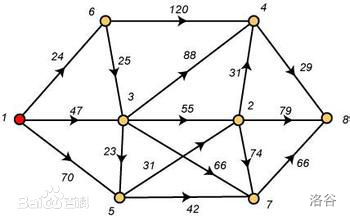
对于这样一张有向图:
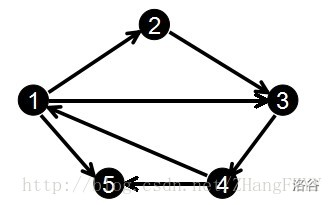
输入边的顺序如下:
1 2
2 3
3 4
1 3
4 1
1 5
4 5
对于邻接表来说是这样的:
1 -> 2 -> 3 -> 5
2 -> 3
3 -> 4
4 -> 1 -> 5
5 -> ^
对于链式前向星来说是这样的:
edge[0].to = 2; edge[0].next = -1; head[1] = 0;
edge[1].to = 3; edge[1].next = -1; head[2] = 1;
edge[2].to = 4; edge[2],next = -1; head[3] = 2;
edge[3].to = 3; edge[3].next = 0; head[1] = 3;
edge[4].to = 1; edge[4].next = -1; head[4] = 4;
edge[5].to = 5; edge[5].next = 3; head[1] = 5;
edge[6].to = 5; edge[6].next = 4; head[4] = 6;
简化后:1 -> 5 -> 3 -> 2
核心代码:
struct edge{
int to , nxt , w;
};
edge a[MAXN];
void add(int u , int v , int w) {
a[cnt].w = w;
a[cnt].to = v;
a[cnt].nxt = head[u];
head[u] = cnt ++;
}
图的遍历
(内置芝士)什么是图的遍历:从图中的某个顶点出发,按某种方法对图中的所有顶点访问且仅访问一次。为了保证图中的顶点在遍历过程中仅访问一次,要为每一个顶点设置一个访问标志
1.有向图的dfs
题目大意:
给定一个有向图,有 N N N个顶点, M M M条边,顶点从 1.. N 1..N 1..N依次编号,求出字典序最小的深度优先搜索顺序
总体思路:
利用邻接表存储点的关系,将点放入
d
f
s
dfs
dfs里搜索与之相邻但未被遍历过的点
核心代码如下:
void dfs(int k) {
if (vis[k]) return;
vis[k] = 1;
printf("%d ", k);
for (set<int>:: iterator it = st[k].begin() ; it != st[k].end() ; it ++) {
dfs(*it);
}
}
for (int i = 1 ; i <= m ; i ++) {
int u , v;
scanf("%d %d", &u , &v);
st[u].insert(v);
}
dfs(1);
for (int i = 1 ; i <= n ; i ++) {
if (!vis[i]) dfs(i);
}
2.有向图的bfs
题目大意:
给定一个有向图,有 N N N个顶点, M M M条边,顶点从 1 1 1… N N N依次编号,求出字典序最小的宽度优先搜索顺序
思路:
利用邻接表存储点的关系,将点放入
b
f
s
bfs
bfs里搜索与之相邻但未被遍历过的点
核心代码如下:
void bfs(int k) {
q.push(k);
while(!q.empty()) {
int x = q.front();
q.pop();
if (vis[x]) continue;
vis[x] = 1;
printf("%d ", x);
for (set<int>:: iterator it = st[x].begin() ; it != st[x].end() ; it ++) {
q.push(*it);
}
}
}
for (int i = 1 ; i <= m ; i ++) {
int u , v;
scanf("%d %d", &u , &v);
st[u].insert(v);
}
bfs(1);
for (int i = 1 ; i <= n ; i ++) {
if (!vis[i]) bfs(i);
}
3.无向图的bfs
题目大意:
一个无向图,从指定顶点出发进行 B F S BFS BFS,求遍历得到的顶点序
总体思路:
利用邻接矩阵存储边(每一层要从小到大排序,矩阵方便操作),将点放入
b
f
s
bfs
bfs里搜索与之相邻但未被遍历过的点
核心代码如下:
void bfs() {
q.push(rt);
while(!q.empty()) {
int x = q.front();
q.pop();
if (vis[x]) continue;
vis[x] = 1;
printf("%d ", x);
for (int i = 1 ; i <= n ; i ++) {
if (adj[x][i]) {
q.push(i);
}
}
}
}
for (int i = 1 ; i <= m ; i ++) {
int u , v;
scanf("%d %d", &u , &v);
adj[u][v] = 1;
adj[v][u] = 1;
}
一笔画问题(欧拉路)
Ps:欧拉路指的是:存在这样一种图,可以从其中一点出发,不重复地走完其所有的边如果欧拉路的起点与终点相同,则称之为欧拉回路
需满足条件:
- 图是连通的,若不连通不可能一次性遍历所有边
- 对于无向图:有且仅有两个点,与其相连的边数为奇数,其他点相连边数皆为偶数;或所有点皆为偶数边点。对于两个奇数点,一个为起点,一个为终点。起点需要出去,终点需要进入,故其必然与奇数个边相连
- 如果存在这样一个欧拉路,其所有的点相连边数都为偶数,那说明它是欧拉回路
- 对于有向图:除去起点和终点,所有点的出度与入度相等。起点出度比入度大1,终点入度比出度大1。若起点终点出入度也相同,则为欧拉回路
利用 d f s dfs dfs求一笔画路径
题目大意:
根据一笔画的两个定理,如果寻找欧拉回路,对任意一个点执行深度优先遍历;找欧拉路,则对一个奇点执行 d f s dfs dfs,时间复杂度为 O ( m + n ) O(m+n) O(m+n), m m m为边数, n n n是点数
总体思路:
即把奇点作为起点放入
d
f
s
dfs
dfs搜索,每搜索到一个相邻的点即把这条边删掉,若所有边都遍历到了,输出答案
核心代码如下:
void dfs(int k , int id) {
ans[id] = k;
bool f = 1;
for (int i = 1 ; i <= n ; i ++) {
for (int j = 1 ; j <= m ; j ++) {
if (a[i][j]) {
f = 0;
break;
}
}
}
if (f) {
for (int i = 1 ; i <= id ; i ++) {
printf("%d ", ans[i]);
}
exit(0);
}
for (int i = 1 ; i <= n ; i ++) {
if (a[k][i]) {
a[k][i] = 0;
a[i][k] = 0;
dfs(i , id + 1);
a[k][i] = 1;
a[i][k] = 1;
}
}
}
d f s dfs dfs暴力求解哈密顿图
思路:利用邻接表存储边的关系,枚举1~ n n n作为起点的情况,然后每搜到一种情况便把 a n s ans ans加 1 1 1即可
int dfs(int k , int cnt) {
if(cnt == n) return 1;
int res = 0;
for (int i = 1 ; i <= h[k][0] ; i ++) {
if (!vis[h[k][i]]) {
vis[h[k][i]] = 1;
res += dfs(h[k][i] , cnt + 1);
vis[h[k][i]] = 0;
}
}
return res;
}
for (int i = 1 ; i <= n ; i ++) {
vis[i] = 1;
ans += dfs(i , 1);
vis[i] = 0;
}
最短路问题
最短路径问题是图论研究中的一个经典算法问题, 旨在寻找图
(
(
(由结点和路径组成的
)
)
)中两结点之间的最短路径。
例如:
1. f l o y d floyd floyd
佛洛伊德是最简单的最短路径算法,可以计算图中任意两点间的最短路径。时间复杂度为 O ( N 3 ) O(N^3) O(N3),适用于出现负边权的情况
算法描述:
- 初始化:
点 u u u、 v v v如果有边相连,则 F [ u ] [ v ] = w [ u ] [ v ] F[u][v]=w[u][v] F[u][v]=w[u][v],如果不相连,则 F [ u ] [ v ] = 0 x 3 f 3 f 3 f 3 f F[u][v]=0x3f3f3f3f F[u][v]=0x3f3f3f3f
2. 核心代码
for(int k = 1 ; k <= n ; k ++) {
for(int i = 1 ; i <= n ; i ++) {
for(int j = 1 ; j <= n ; j ++) {
if(F[i][j] > F[i][k] + F[k][j]) {
F[i][j] = F[i][k] + F[k][j];
}
}
}
}
3. 算法解释:
F
[
i
]
[
j
]
F[i][j]
F[i][j]得出的就是任意起点
i
i
i到任意终点
j
j
j的最短路径
- 动态规划以”途径点集大小”为阶段
- 决策需要枚举中转点,不妨考虑也以中转点集为阶段
-
F
[
k
]
[
i
]
[
j
]
F[k][i][j]
F[k][i][j]表示”可以经过标号
≤
k
≤k
≤k的点中转时”从
i
i
i到
j
j
j的最短路
-
F
[
0
]
[
i
]
[
j
]
=
W
[
i
]
[
j
]
F[0][i][j]=W[i][j]
F[0][i][j]=W[i][j],
W
W
W为前面定义的邻接矩阵
-
F
[
k
]
[
i
]
[
j
]
F[k][i][j]
F[k][i][j] =
m
i
n
min
min{
F
[
k
−
1
]
[
i
]
[
j
]
F[k-1][i][j]
F[k−1][i][j] ,
F
[
k
−
1
]
[
i
]
[
k
]
F[k-1][i][k]
F[k−1][i][k] +
F
[
k
−
1
]
[
k
]
[
j
]
F[k-1][k][j]
F[k−1][k][j]}
-
k
k
k这一维空间可以省略,变成
F
[
i
]
[
j
]
F[i][j]
F[i][j]
- 由于
k
k
k是
D
P
DP
DP的阶段循环,所以
k
k
k循环必须要放在最外层
4. 使用 f l o y d floyd floyd输出最短路径:
F l o y d Floyd Floyd算法输出路径也是采用记录前驱点的方式。因为 f l o y d floyd floyd是计算任意两点间最短路径的算法, F [ i ] [ j ] F[i][j] F[i][j]记录从 i i i到 j j j的最短路径值。故我们定义 p r e [ i ] [ j ] pre[i][j] pre[i][j]为一个二维数组,记录从 i i i到 j j j的最短路径中, j j j的前驱点是哪一个,递归还原路径
- p r e [ i ] [ i ] pre[i][i] pre[i][i] 为 0,输入相连边时,重置相连边尾结点的前驱若有无向边: p r e [ a ] [ b ] = a pre[a][b]=a pre[a][b]=a, p r e [ b ] [ a ] = b ; pre[b][a]=b; pre[b][a]=b;
- 更新若 f l o y d floyd floyd最短路有更新,那么 p r e [ i ] [ j ] = p r e [ k ] [ j ] ; pre[i][j]=pre[k][j]; pre[i][j]=pre[k][j];
- 递归输出指两点 s s s, e e e的最短路,先输出起点 s s s,再将终点 e e e放入递归,输出 s + 1 − e s+1-e s+1−e的所有点。
核心代码:
void floyd() {
for (int k = 1 ; k <= n ; k ++) {
for (int i = 1 ; i <= n ; i ++) {
for (int j = 1 ; j <= n ; j ++) {
if (dp[i][k] + dp[k][j] < dp[i][j]) {
dp[i][j] = dp[i][k] + dp[k][j];
pre[i][j] = pre[k][j];
}
}
}
}
}
void print(int x) {
if (pre[s][x] == 0) return;
print(pre[s][x]);
printf(" %d", x);
}
2. d i j k s t r a dijkstra dijkstra
主要方法:
- 分成两组:已经确定最短路、尚未确定最短路
- 从第2组中选择路径长度最短的点放入第1组并扩展
- 本质是贪心,只能应用于正权图
- 普通的 D j k s t r a Djkstra Djkstra算法 O ( N 2 ) O(N^2) O(N2)
- 堆优化的 D i j k s t r a Dijkstra Dijkstra算法 O ( N l o g N ) − O ( M l o g N ) O(NlogN)-O(MlogN) O(NlogN)−O(MlogN)
引入概念——松弛操作:
- 原来用一根橡皮筋直接连接 a a a、 b b b两点,现在有一点k,使得 a − > k − > b a->k->b a−>k−>b比 a − > b a->b a−>b的距离更短,则把橡皮筋改为 a − > k − > b a->k->b a−>k−>b ,这样橡皮筋更加松弛。
- 代码实现: i f ( d i s [ b ] > d i s [ k ] + w [ k ] [ b ] ) d i s [ b ] = d i s [ k ] + w [ k ] [ b ] ; if(dis[b]>dis[k]+w[k][b])dis[b]=dis[k]+w[k][b]; if(dis[b]>dis[k]+w[k][b])dis[b]=dis[k]+w[k][b];
算法描述:
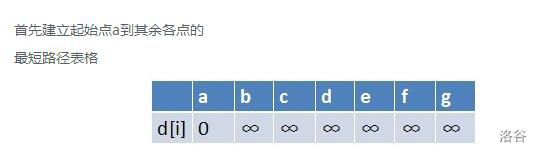
设起点为 s s s, d i s [ v ] dis[v] dis[v]表示从指定起点 s s s到 v v v的最短路径, p r e [ v ] pre[v] pre[v]为 v v v的前驱,用来输出路径
1.初始化
m
e
m
s
e
t
(
d
i
s
,
+
∞
)
memset(dis,+∞)
memset(dis,+∞)
m
e
m
s
e
t
(
v
i
s
,
f
a
l
s
e
)
memset(vis,false)
memset(vis,false);
(
i
n
t
(int
(int
v
=
1
;
v
<
=
n
;
v
+
+
)
v = 1 ; v <= n ; v ++)
v=1;v<=n;v++)
d
i
s
[
v
]
=
w
[
s
]
[
v
]
dis[v]=w[s][v]
dis[v]=w[s][v];
d
i
s
[
s
]
=
0
dis[s]=0
dis[s]=0;
p
r
e
[
s
]
=
0
pre[s]=0
pre[s]=0;
v
i
s
[
s
]
=
t
r
u
e
vis[s]=true
vis[s]=true;
2. 松弛 n − 1 n-1 n−1次
- 在没有被访问过的点中找一个相邻顶点k,使得 d i s [ k ] dis[k] dis[k]是最小的;
- k k k标记为已确定的最短路 v i s [ k ] = t r u e vis[k]=true vis[k]=true;
- 用 f o r for for循环更新与k相连的每个未确定最短路径的顶点 v v v(所有未确定最短路的点都松弛更新)
3.算法结束
dis [ v ] [v] [v]为 s s s到 v v v的最短路距离; p r e [ v ] pre[v] pre[v]为 v v v的前驱结点,用来输出路径
让我们来看一组动画 (不动的动画)
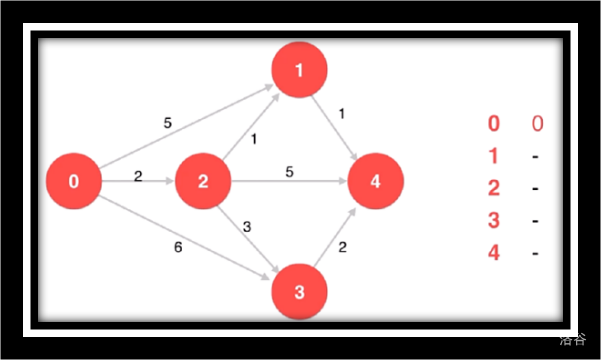
原始图
初始化
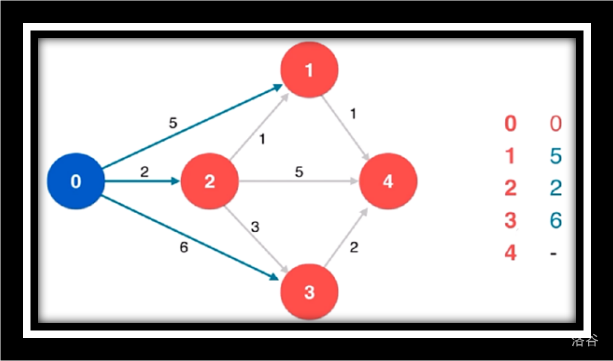
寻找源点相邻的最短路
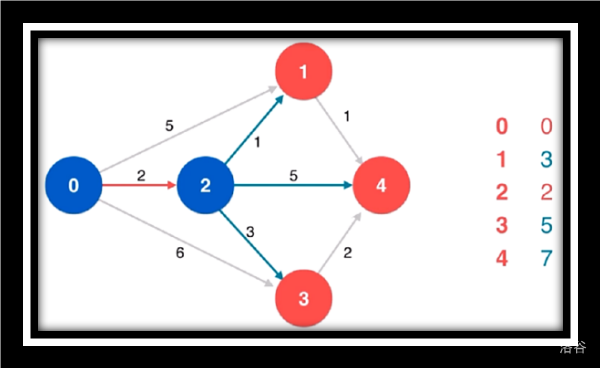
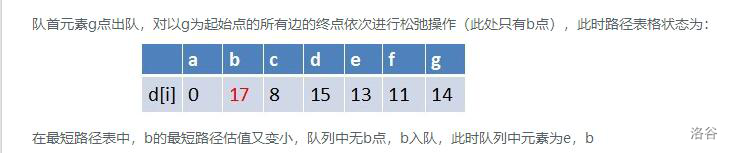
松弛源点到1/4/3
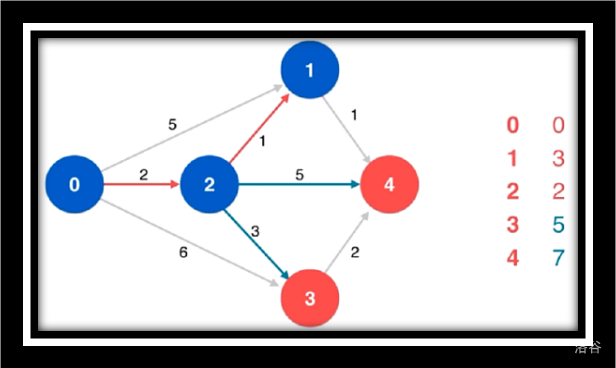
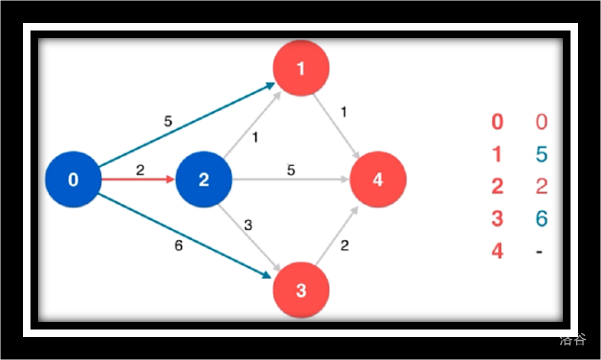
寻找源点到1/4/3的最短路
松弛源点到4

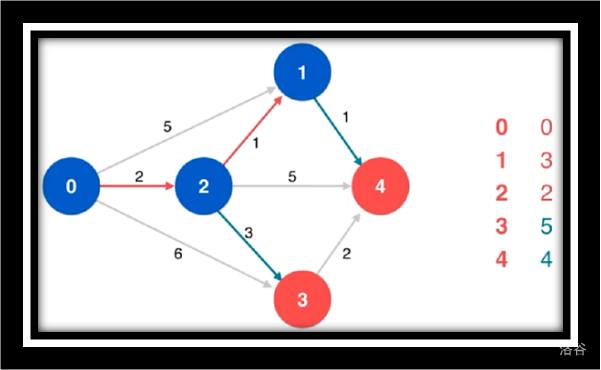
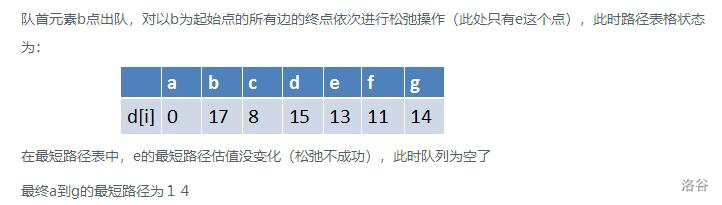
寻找源点到4的最短路由于点4没有相邻点故不作松弛操作
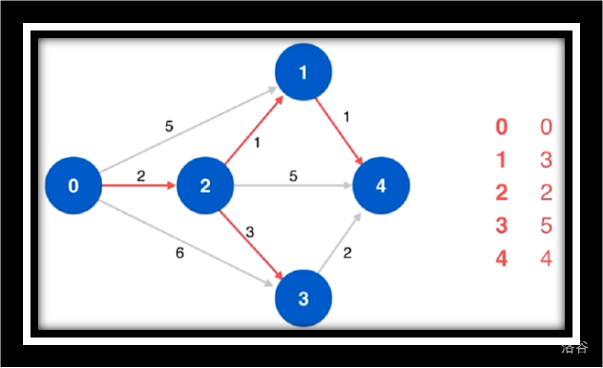
寻找剩余未访问点3松弛源点到4并未更改最短路
最后奉上本人的代码(优化后) :
struct edge{
int to , nxt , w;
}a[MAXN];
void add(int u , int v , int w) {
a[++ cnt].w = w;
a[cnt].to = v;
a[cnt].nxt = head[u];
head[u] = cnt;
}
struct node{
int id , w;
node(int iid , int ww) {
id = iid;
w = ww;
}
friend bool operator<(node x , node y) {
return x.w > y.w;
}
};
priority_queue<node> q;
void dijkstra() {
memset(dis , 0x3f , sizeof(dis));
dis[s] = 0;
q.push(node(s , 0));
while(!q.empty()) {
int u = q.top().id;
q.pop();
if (vis[u]) continue;
vis[u] = 1;
for (int i = head[u] ; i ; i = a[i].nxt) {
int v = a[i].to , w = a[i].w;
if (dis[v] > dis[u] + w) {
dis[v] = dis[u] + w;
q.push(node(v , dis[v]));
}
}
}
}
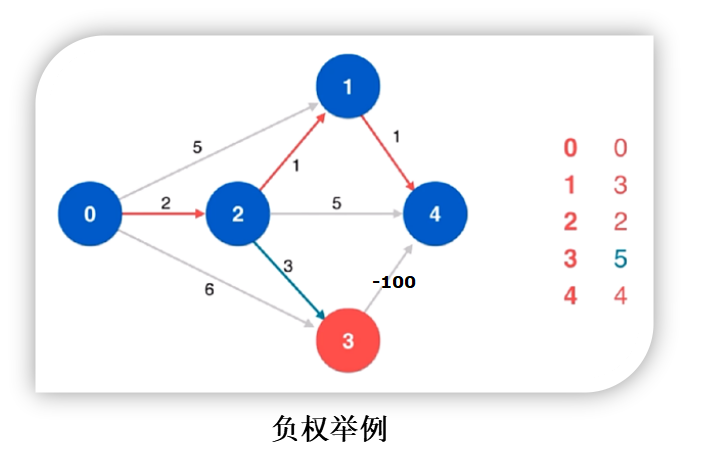
3. B e l l m a n − F o r d Bellman-Ford Bellman−Ford
- B e l l m a n − F o r d Bellman-Ford Bellman−Ford算法:对每条边执行更新,迭代 N − 1 N-1 N−1次
- 具体操作是对图进行最多 n − 1 n-1 n−1次松弛操作,每次操作对所有的边进行松弛,为什么是 n − 1 n-1 n−1次操作呢?这是因为我们输入的边不一定是按源点由近至远,万一是由远至近最坏情况就得 n − 1 n-1 n−1次
- 可以应用于负权图
- 预计时间复杂度: O ( n 2 ) O(n^2) O(n2)
非本人代码(不想打了):
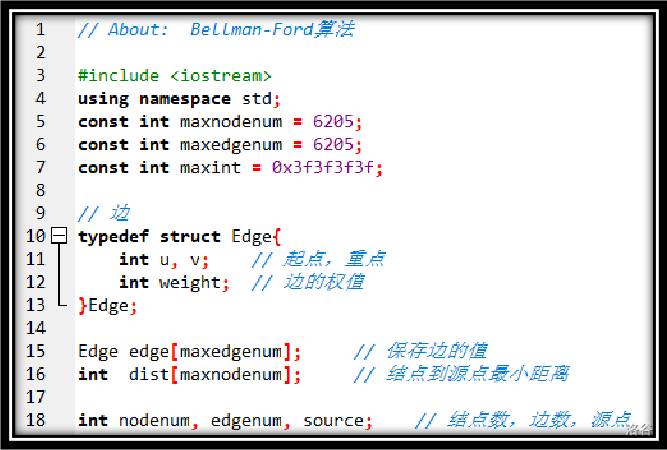
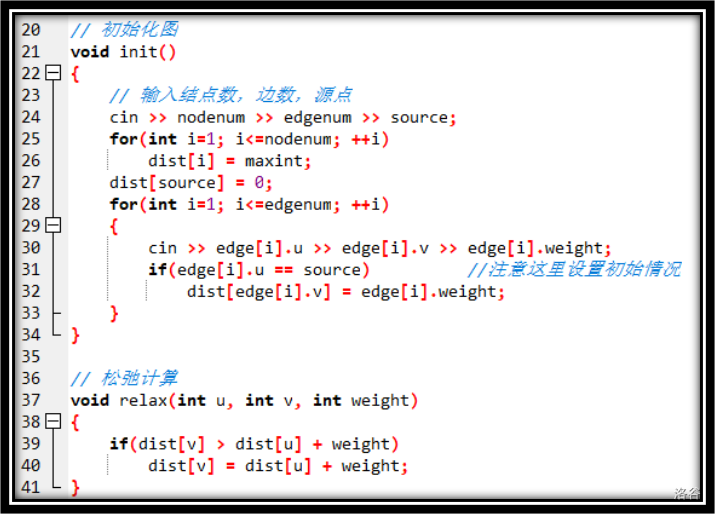
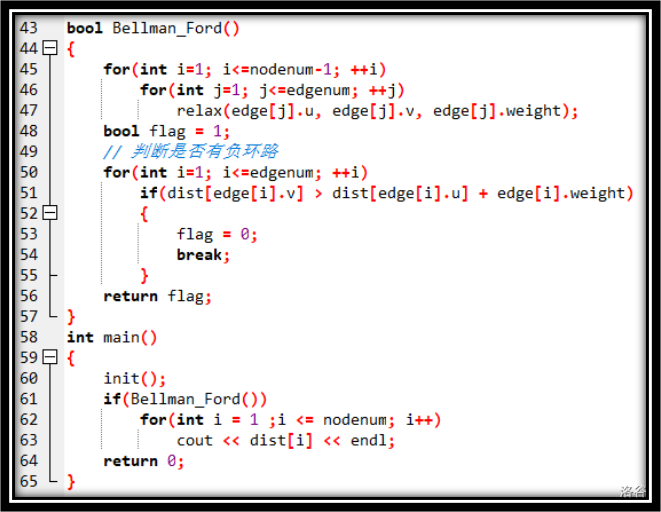
想都不用想就知道有多慢
所以,我们引入了一个新的算法—— S P F A SPFA SPFA
4. S P F A ( s h o r t e s t SPFA(shortest SPFA(shortest p a s t past past f a s t fast fast a l g o r i t h m ) algorithm) algorithm)
- S P F A SPFA SPFA等于队列优化的 B e l l m a n − F o r d Bellman-Ford Bellman−Ford算法
- 本质上还是迭代——每更新一次就考虑入队
- 稀疏图上 O ( k N ) O(kN) O(kN),稠密图上退化到 O ( N 2 ) O(N^2) O(N2)
- 可以应用于有向负权图
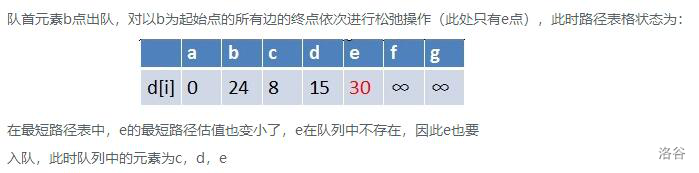
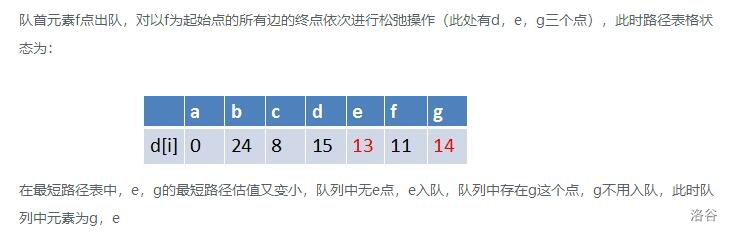
- 算法实现:它采用了队列和松弛技术。先将源点加入队列。然后从队列中取出一个点(此时该点为源点),对该点的邻接点进行松弛,如果该邻接点松弛成功且不在队列中,则把该点加入队列。如此循环往复,直到队列为空,则求出了最短路径
- 判断有无负环:如果某个点进入队列的次数超过 N N N次则存在负环 ( 存在负环则无最短路径,如果有负环则会无限松弛,而一个带 n n n个点的图至多松弛 n − 1 n-1 n−1次)
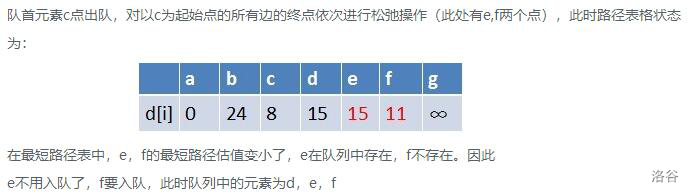




你理解了吗?
bool vis[MAXN];
struct edge{
int to , w , nxt;
}a[MAXN];
void add(int u , int v , int w) {
a[++ cnt].w = w;
a[cnt].to = v;
a[cnt].nxt = head[u];
head[u] = cnt;
}
struct node {
int id , w;
node(int iid , int ww) {
id = iid;
w = ww;
}
};
queue<node> q;
int SPFA() {
memset(dis , 0x3f, sizeof(dis));
dis[s] = 0;
q.push(node(s , 0));
while(!q.empty()) {
int u = q.front().id;
q.pop();
vis[u] = 0;
for (int i = head[u] ; i ; i = a[i].nxt) {
int v = a[i].to , w = a[i].w;
if (dis[v] > dis[u] + w) {
dis[v] = dis[u] + w;
if (!vis[v]) {
vis[v] = 1;
q.push(node(v , dis[v]));
}
}
}
}
return 1;
}
最小生成树
引入:树有这样一个定理: N N N个点用 N − 1 N-1 N−1条边连接成一个连通块,形成的图形只可能是树,叫做生成树!因此,一个有 N N N个点的连通图,边一定 ≥ N − 1 ≥N-1 ≥N−1条
概念:最小生成树 ( M i n i m u m (Minimum (Minimum S p a n n i n g Spanning Spanning T r e e s Trees Trees简称 M S T ) MST) MST)求带权无向图的一棵子树,包含 N N N个点, N − 1 N-1 N−1条边,边权之和最小
P r i m Prim Prim算法
算法思路:
- 以任意一个点为基准点
- 节点分为两组:
1)在 M S T MST MST上到基准点的路径已经确定的点
2)尚未在 M S T MST MST中与基准点相连的点 - 不断从第2组中选择与第1组距离最近的点加入第1组,类似于 D i j k s t r a Dijkstra Dijkstra,本质也是贪心, O ( N 2 ) O(N^2) O(N2)
算法描述:
总体思想:也使用“蓝白点”思想,白点代表已进入最小生成树的点,蓝点代表未进入最小生成树的点
以1为起点生成最小生成树, m i n [ v ] min[v] min[v]表示蓝点 v v v与白点相连的最小边权, M S T MST MST 表示最小生成树的权值之和
(
a
)
(a)
(a)初始化:
m
i
n
[
v
]
=
∞
(
v
≠
1
)
min[v]=∞(v≠1)
min[v]=∞(v=1);
m
i
n
[
1
]
=
0
;
M
S
T
=
0
;
min[1]=0;MST=0;
min[1]=0;MST=0;
(
b
)
f
o
r
(
i
=
1
;
i
<
=
n
;
i
+
+
)
(b)for(i=1;i<=n;i++)
(b)for(i=1;i<=n;i++)
f o r for for寻找 m i n [ u ] min[u] min[u],最小的蓝点 u u u;
②将 u u u标记为白点;
③ M S T + = m i n [ u ] MST+=min[u] MST+=min[u];
④ f o r for for与白点 u u u相连的所有蓝点v(可暴力枚举,更好的是求 v e c t o r vector vector的 s i z e size size)
i f ( w [ u ] [ v ] < m i n [ v ] ) if(w[u][v]<min[v]) if(w[u][v]<min[v]) m i n [ v ] = w [ u ] [ v ] ; min[v]=w[u][v]; min[v]=w[u][v];
( c ) (c) (c)算法结束:MST即为最小生成树的权值之和
这次ppt的图片不是一个整体,太难盗图了,就直接上代码吧
void Prim() {
for (int i = 1 ; i <= n ; i ++) d[i] = 0x3f3f3f3f3f3f;
d[1] = 0;
q.push(node(1 , 0));
while(!q.empty()) {
int u = q.top().id;
q.pop();
if (vis[u]) continue;
vis[u] = 1;
for (int i = head[u] ; i ; i = a[i].nxt) {
ll v = a[i].to;
ll w = a[i].w;
if (w < d[v] && !vis[v]) {
d[v] = w;
q.push(node(v , d[v]));
}
}
MST += d[u];
}
}
K r u s k a l Kruskal Kruskal算法
算法思路:
- 利用并查集,起初每个点各自构成一个集合
- 所有边按照边权从小到大排序,依次扫描
- 若当前扫描到的边连接两个不同的点集就合并
- 本质也是贪心, O ( M l o g N ) O(MlogN) O(MlogN)
- 与Prim算法相比,没有基准点,该算法是不断选择两个距离最近的集合进行合并的过程
算法描述:
( a ) (a) (a)初始化
①写出并查集三件套
②将边按权值大小排序
$(b)
① i f if if两个点的祖先不是同一个,将两个点合并,并累加权值;
②如果图已经联通,即 t o t = = n tot==n tot==n跳出
©算法结束: M S T MST MST即为最小生成树的权值之和。
依旧很难盗图,无语
void kruscal() {
int tot = 0;
for (int i = 1 ; i <= m ; i ++) {
if (UnionSet(a[i].u , a[i].v)) {
MST += a[i].w;
tot ++;
if (tot == n) return;
}
}
}



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 地球OL攻略 —— 某应届生求职总结
· 周边上新:园子的第一款马克杯温暖上架
· Open-Sora 2.0 重磅开源!
· 提示词工程——AI应用必不可少的技术
· .NET周刊【3月第1期 2025-03-02】