[自控]PID入门(二)初识pid算法
废话不多说直接承接上文
PID
三个字母分别是比例、积分、微分的缩写,他的公式也非常的简单,下面就是最常用的位置式pid的离散化公式了:
在这个式子中,U(k)即pid的输出,Kp、Ki、Kd是三个常数,需要我们去整定,err(k)指的是第k次时期望值与输出值的差值。
当然直接看公式还是过于枯燥了,我们回到上文的例子。
回到那个栗子
由于pid是基于误差进行计算,我这里把昨天的图再进行一个改进:
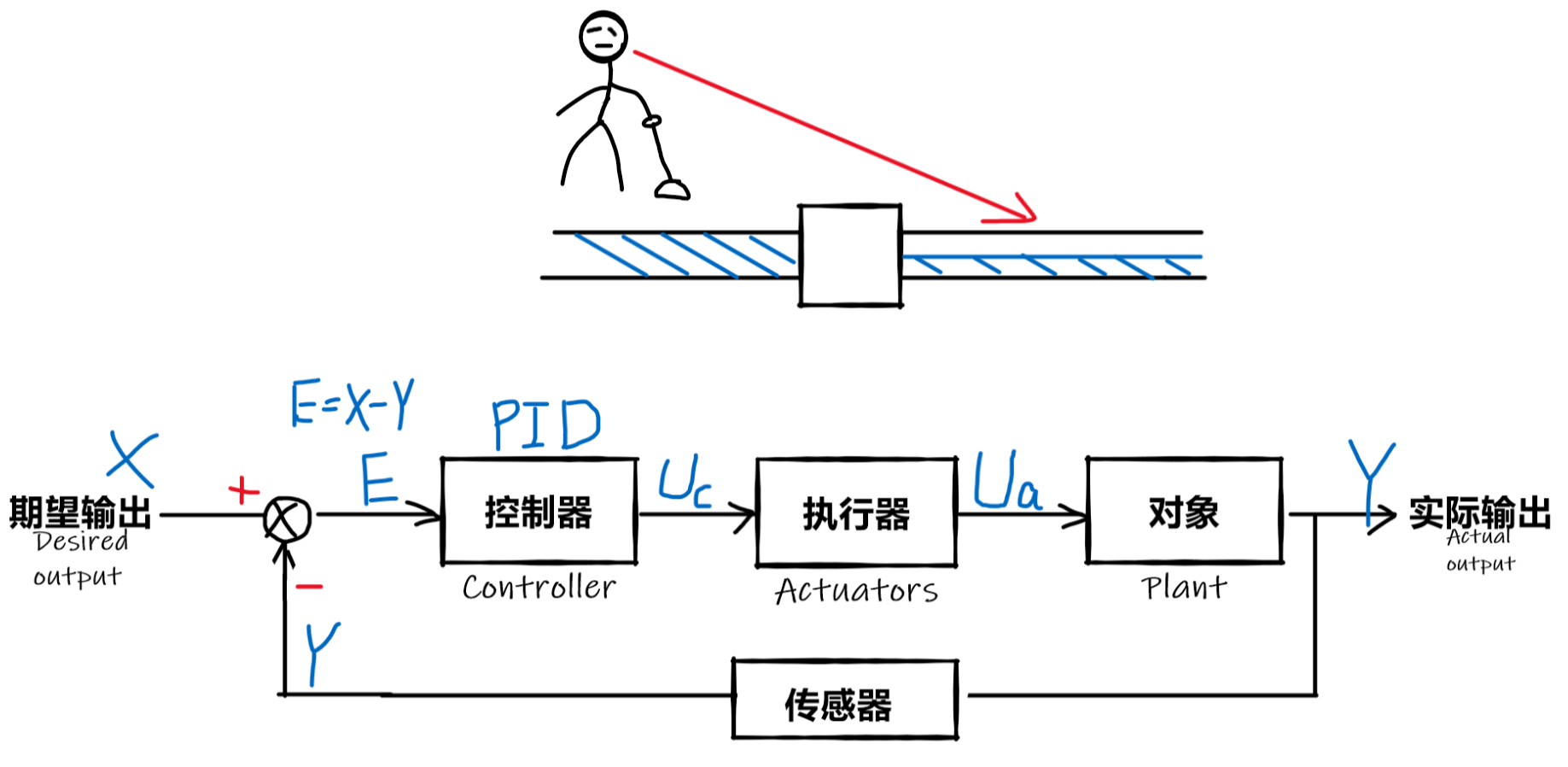
在图的左边,期望输出X减去实际输出Y获得的误差E来作为输入值给到PID控制器,然后再由PID去控制这个系统。
下面就分开来通俗的讲讲PID三个参数的运算到底是何意义
比例Proportional调节
在pid公式中我们来单看P项的输出:
非常好理解,这里的小人看这个误差大不大,如果误差比较大,那可以把控制器的输出调大,等到误差小的时候我也相应地把输出调小,如果误差从正变成负了,那我也同样的把输出反过来。
积分Integral调节
同样的,我们把I项的输出拎出来:
在小人这方面,我们可以这样理解:小人看见有误差,同时,误差存在的时间非常久,那就该把拉杆多拉动一些了。
不过单单这么说就不能体现I调节一些重要的作用了,这里我换一个例子:
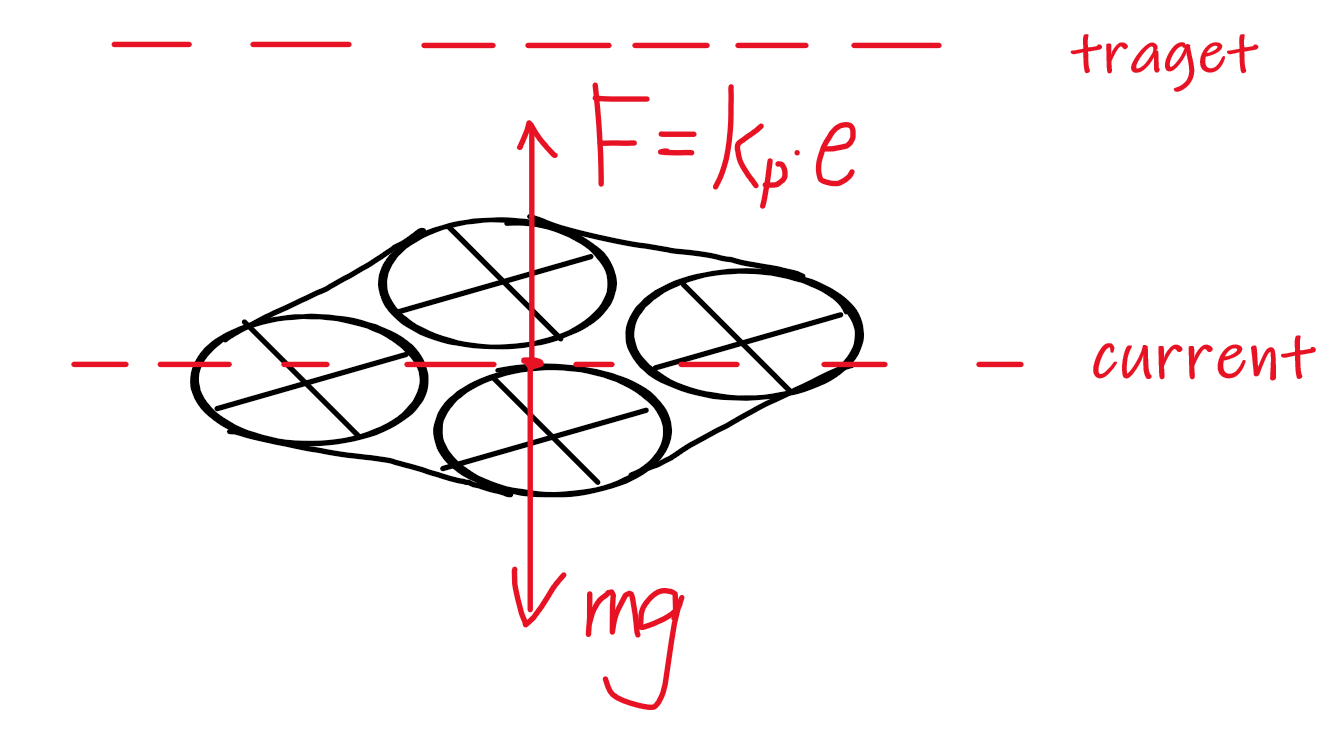
请大家把我画的这坨东西当作一个飞行器。这个时候它的任务是飞到target的高度,我们把pid的输出值简单当成飞行器的上升力,此时考虑如果我们只用P调节,那么我们会遇到一个问题,就是虽然始终有误差值,但是\(K_pe\)的值在我画的那条线上就已经等于重力了,再往上P调节的输出也完全无法满足让飞行器飞到指定高度。那么这个时候如果有I调节,我们将误差值进行积分,那我们就可以慢慢的把输出累积上去,最终就能达到目标值了。那么这就是积分项的一个消除稳态误差的效果。
微分Derivative调节
D项的输出:
相当于把误差对时间求导。
看误差的变化率有什么意思呢,其实它是一个提前抑制的作用,你会发现如果误差值持续减小的话那么D项的值也是小于零的,这里的小人发现误差变化过大了,实际的输出值很有可能会超出预期值,怎么办呢,那其实就可以通过D项来抑制输出,让他的变化率不那么大,最终可以平稳的从当前值达到目标值,有效的减少超调。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号