[自控]PID入门(一)开环与闭环
PID是自控中非常重要也是非常常用的一个算法,很多地方都会用到,如果能将pid理解并且加以熟练应用的话可以做到非常好的控制效果。
本篇文章会带大家粗略的认识一下开闭环的概念
从一个栗子入手
想不出啥更好的例子了,这里就用之前看见别人举的例子吧。
如下图:
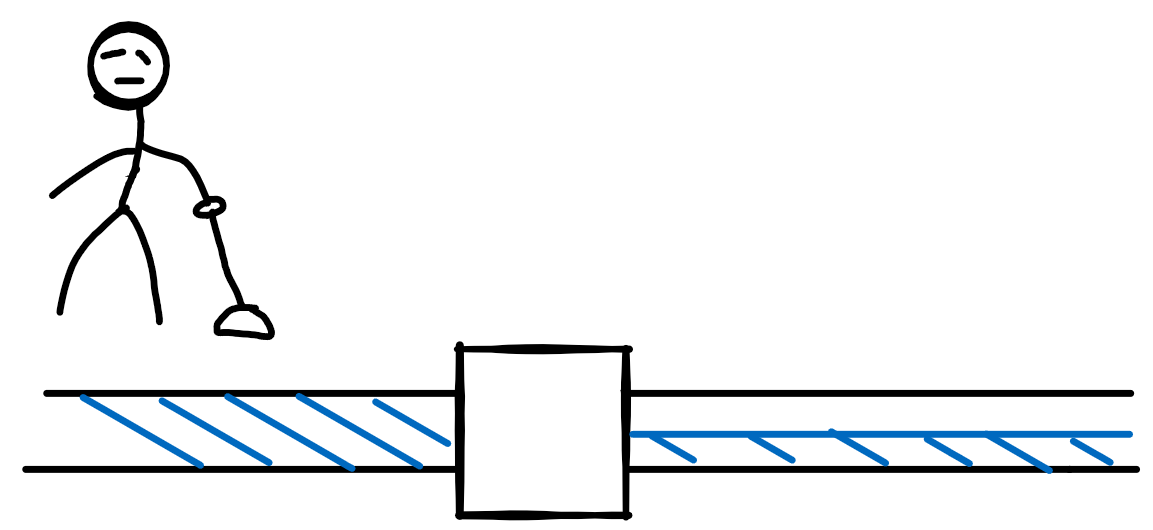
下面是一根水管,方块可以理解为水阀,人手里的拉杆可以改变电车方向操纵水阀的开合程度。
这个小人的任务是控制输出的水流到某一个设定的流量
根据这个小人的摆烂程度,我们可以将他的工作情况作两种划分
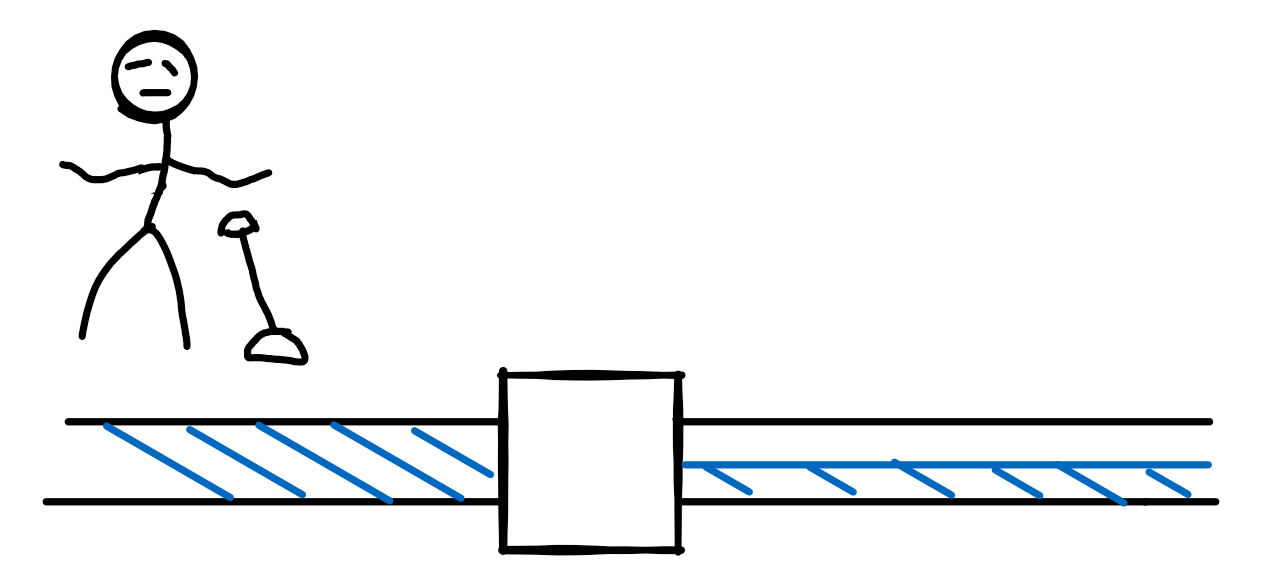
开环控制
这里的小人想摆烂了,他只会根据设定的水流量进行拉动拉杆的操作,其他任何事件都不归他管
为了显得稍微专业点我准备了下面这张图:

上面就是一个最简单的开环控制系统了
控制器即小人的脑袋及小人手里的拉杆,控制器可以通过输入来调整自己的输出
执行器即阀门
可以看到这个系统其实不是非常可靠,我们并不知道这个实际输出到底有没有达到我们的预期值。
打个比方说,如果设定需要1L/s的流量,小人就会拉动拉杆10度,但是实际上可能会因为水阀的误差、输入水流的变化导致输出水流并不能达到我们的预期值。
因此万不得已千万别用开环除非你足够自信或者想摆烂
闭环控制
这人终于有那么点干活的样子了
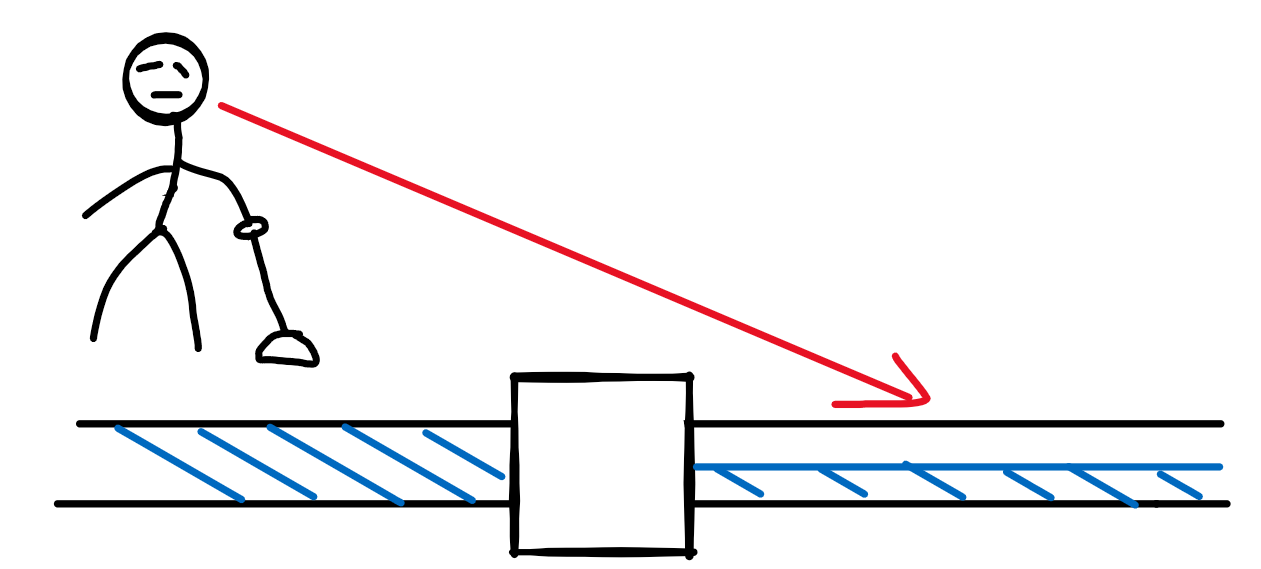
他现在可以用他的眼睛去看水流的输出!
小人通过水流的输出和设定的任务值两方面去调节这个拉杆
同样的,我这里也画张稍微专业点的图:
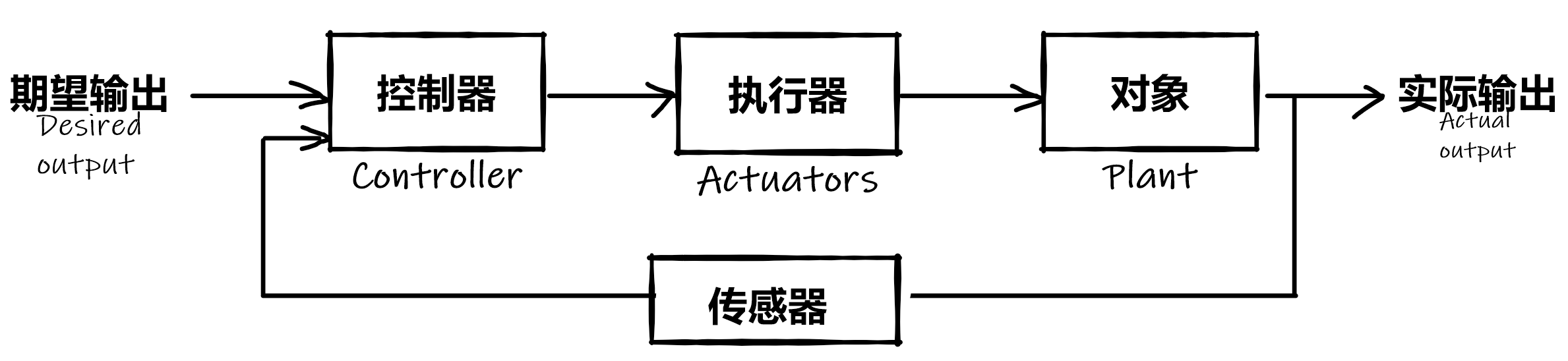
上图就是一个简单的闭环了
通过传感器的采样,将实际输出值也作为输入值给控制器,这样一来控制器就有两个输入。
我们可以通过控制器里面的算法去输出,最终也就可以达到一个比较理想的结果。
讲了那么多其实也不是很多,那么PID究竟是个啥呢?其实PID就是在控制器里面跑的一个非常经典的算法了。关于PID的内容,我会在下篇文章中介绍。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号