Games101--Assignment3
目录
Assignment3的任务要求
1. 修改函数rasterize_triangle(const Triangle& t) in rasterizer.cpp: 在此处实现与作业2 类似的插值算法,实现法向量、颜色、纹理颜色的插值。
2. 修改函数get_projection_matrix() in main.cpp: 将你自己在之前的实验中实现的投影矩阵填到此处,此时你可以运行./Rasterizer output.png normal来观察法向量实现结果。
3. 修改函数phong_fragment_shader() in main.cpp: 实现Blinn-Phong 模型计算Fragment Color.
4. 修改函数texture_fragment_shader() in main.cpp: 在实现Blinn-Phong的基础上,将纹理颜色视为公式中的kd,实现Texture Shading FragmentShader.
5. 修改函数bump_fragment_shader() in main.cpp: 在实现Blinn-Phong 的基础上,仔细阅读该函数中的注释,实现Bump mapping.
6. 修改函数displacement_fragment_shader() in main.cpp: 在实现Bumpmapping 的基础上,实现displacement mapping.
Assignment3--FAQ
http://games-cn.org/forums/topic/frequently-asked-questionskeep-updating/
(1) bump mapping 部分的 h(u,v)=texture_color(u,v).norm, 其中 u,v 是 tex_coords, w,h 是 texture 的宽度与高度
(2) rasterizer.cpp 中 v = t.toVector4()
(3) get_projection_matrix 中的 eye_fov 应该被转化为弧度制
(4) bump 与 displacement 中修改后的 normal 仍需要 normalize
(5) 可能用到的 eigen 方法:norm(), normalized(), cwiseProduct()
(6) 实现 h(u+1/w,v) 的时候要写成 h(u+1.0/w,v)
步骤
1.实现法向量、颜色、纹理颜色的插值
首先计算三角形内某点的重心坐标(\(\alpha\),\(\beta\),\(\gamma\)),所用公式即为课上所提。使用重心坐标对三角形内的点\((\alpha,\beta,\gamma)\)进行插值,需要插值的属性也用重心坐标进行线性组合,三个顶点的属性为\(V_A\),\(V_B\),\(V_C\),则其属性即为\(V=\alpha V_A+\beta V_B+\gamma V_C\)。
//Screen space rasterization
void rst::rasterizer::rasterize_triangle(const Triangle& t, const std::array<Eigen::Vector3f, 3>& view_pos)
{
// TODO: From your HW3, get the triangle rasterization code.
// TODO: Inside your rasterization loop:
// * v[i].w() is the vertex view space depth value z.
// * Z is interpolated view space depth for the current pixel
// * zp is depth between zNear and zFar, used for z-buffer
// float Z = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
// float zp = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
// zp *= Z;
// TODO: Interpolate the attributes:
// auto interpolated_color
// auto interpolated_normal
// auto interpolated_texcoords
// auto interpolated_shadingcoords
// Use: fragment_shader_payload payload( interpolated_color, interpolated_normal.normalized(), interpolated_texcoords, texture ? &*texture : nullptr);
// Use: payload.view_pos = interpolated_shadingcoords;
// Use: Instead of passing the triangle's color directly to the frame buffer, pass the color to the shaders first to get the final color;
// Use: auto pixel_color = fragment_shader(payload);
auto v = t.toVector4();
int left=MIN(v[0].x(),MIN(v[1].x(),v[2].x()))-1;
int right=MAX(v[0].x(),MAX(v[1].x(),v[2].x()))+1;
int bottom=MIN(v[0].y(),MIN(v[1].y(),v[2].y()))-1;
int top=MAX(v[0].y(),MAX(v[1].y(),v[2].y()))+1;
//int top=MAX(v[0].y(),MIN(v[1].y(),v[2].y()))+1;//镂空效果,不一定非得是top,只要缩小了包围盒。
for(int x=left;x<=right;x++){
for(int y=bottom;y<=top;y++){
if(insideTriangle(x,y,t.v)){
auto[alpha, beta, gamma]=computeBarycentric2D(x, y, t.v);
float Z = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float zp= alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
zp*=Z;
if(zp<depth_buf[get_index(x,y)]){
depth_buf[get_index(x,y)]=zp;
auto interpolated_color=Vector3f(alpha*t.color[0]+beta*t.color[1]+gamma*t.color[2]);
auto interpolated_normal=Vector3f(alpha*t.normal[0]+beta*t.normal[1]+gamma*t.normal[2]).normalized();
auto interpolated_texcoords=Vector2f(alpha*t.tex_coords[0]+beta*t.tex_coords[1]+gamma*t.tex_coords[2]);
auto interpolated_shadingcoords=Vector3f(alpha*view_pos[0]+beta*view_pos[1]+gamma*view_pos[2]);
fragment_shader_payload payload( interpolated_color, interpolated_normal.normalized(), interpolated_texcoords, texture ? &*texture : nullptr);
payload.view_pos = interpolated_shadingcoords;
auto pixel_color = fragment_shader(payload);
depth_buf[get_index(x, y)] = zp;
set_pixel(Vector2i(x,y),pixel_color);
}
}
}
}
}
2.投影矩阵
这里使用的还是之前Assignment2中使用的投影矩阵。
Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio, float zNear, float zFar)
{
// TODO: Use the same projection matrix from the previous assignments
Eigen::Matrix4f projection = Eigen::Matrix4f::Identity();
float n=zNear,f=zFar;
float t=-n*tan(eye_fov/2.0);//Use -n because the left-hand coordinate used in the framework
float r=t*aspect_ratio;
float b=-t,l=-r;
projection<<(2.0*n)/(r-l),0,(r+l)/(l-r),0,
0,(2.0*n)/(t-b),(t+b)/(b-t),0,
0,0,(n+f)/(n-f),(2.0*n*f)/(f-n),
0,0,1,0;
return projection;
}
3.normal上色实现结果

在这里我因为找BUG还得到了另一个镂空的效果,当然这样的结果不是题目要求的,但是看着还挺有意思。原因是此时包围盒的边界计算错误(包围盒没有完全覆盖三角形),造成被三角形覆盖的像素没有被完全采样。不同的边界缩小会有些许区别。

4.实现Blinn-Phong 模型计算Fragment Color
所用公式如下:
\[\begin{aligned}
L&=L_a+L_d+L_s\\
&=k_a I_a +
k_d (\frac{I}{r^2}) \max(0,\pmb{n}\cdot \pmb{l})+
k_s (\frac{I}{r^2})\max(0,\pmb{n}\cdot \pmb{h})^p
\end{aligned}
\]
需要注意的是Eigen中的矩阵系数乘积计算可以使用cwiseProduct。
Eigen::Vector3f phong_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
/*
struct light
{
Eigen::Vector3f position;
Eigen::Vector3f intensity;
};
*/
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
Eigen::Vector3f result_color = {0, 0, 0};
auto n=normal.normalized();
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
// components are. Then, accumulate that result on the *result_color* object.
auto l=(light.position-point).normalized();
auto v=(eye_pos-point).normalized();
auto r=light.position-point;
auto h=(v+l).normalized();
auto La=ka.cwiseProduct(amb_light_intensity);
auto Ld=kd.cwiseProduct(light.intensity/(r.dot(r)))*MAX(0.0,n.dot(l));
auto Ls=ks.cwiseProduct(light.intensity/(r.dot(r)))*pow((MAX(0.0,n.dot(h))),p);
result_color+=La+Ld+Ls;
}
return result_color * 255.f;
}
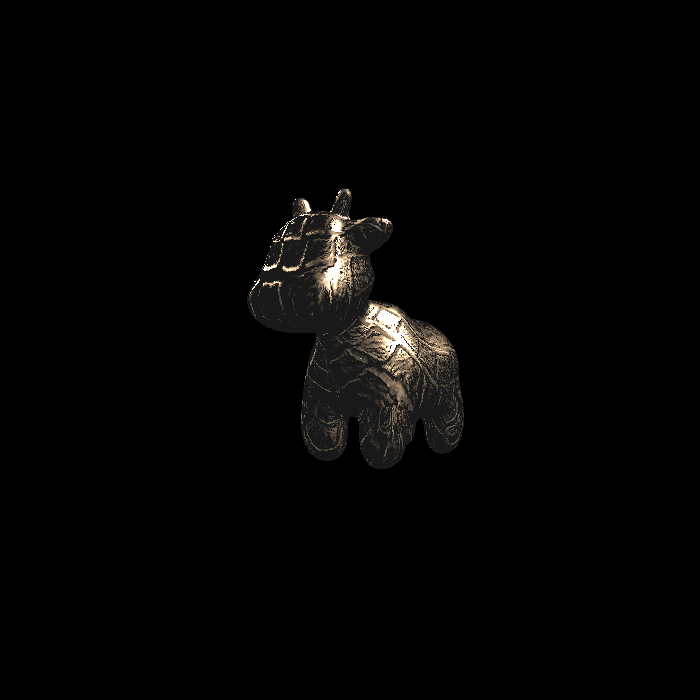
结果如下:

5.实现Texture Shading Fragment Shader
公式还是Blinn-Phong模型的公式,但是此时将纹理颜色视为公式中的\(k_d\)
Eigen::Vector3f texture_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f return_color = {0, 0, 0};
if (payload.texture)
{
// TODO: Get the texture value at the texture coordinates of the current fragment
return_color=payload.texture->getColor(payload.tex_coords.x(),payload.tex_coords.y());
}
Eigen::Vector3f texture_color;q
texture_color << return_color.x(), return_color.y(), return_color.z();
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = texture_color / 255.f;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = texture_color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
Eigen::Vector3f result_color = {0, 0, 0};
auto n=normal.normalized();
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
// components are. Then, accumulate that result on the *result_color* object.
auto l=(light.position-point).normalized();
auto v=(eye_pos-point).normalized();
auto r=light.position-point;
auto h=(v+l).normalized();
auto I=light.intensity;
auto La=ka.cwiseProduct(amb_light_intensity);
auto Ld=kd.cwiseProduct(I/(r.dot(r)))*MAX(0.0,n.dot(l));
auto Ls=ks.cwiseProduct(I/(r.dot(r)))*pow((MAX(0.0,n.dot(h))),p);
result_color+=La+Ld+Ls;
}
return result_color * 255.f;
}
结果如下:

6.实现Bump mapping
注意 bump mapping 部分的 \(h(u,v)=texture\_color(u,v).norm\), 其中 \(u\),\(v\) 是 \(tex\_coords\);\(w\),\(h\) 是 \(texture\) 的宽度与高度,最后法线要归一化,其余按照注释实现即可。
Eigen::Vector3f bump_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
float kh = 0.2, kn = 0.1;
// TODO: Implement bump mapping here
// Let n = normal = (x, y, z)
// Vector t = (x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),z*y/sqrt(x*x+z*z))
// Vector b = n cross product t
// Matrix TBN = [t b n]
// dU = kh * kn * (h(u+1/w,v)-h(u,v))
// dV = kh * kn * (h(u,v+1/h)-h(u,v))
// Vector ln = (-dU, -dV, 1)
// Normal n = normalize(TBN * ln)
auto n=normal.normalized();
auto x=n.x(),y=n.y(),z=n.z();
auto t=Vector3f(x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),z*y/sqrt(x*x+z*z));
auto b=n.cross(t);
Matrix3f TBN;
TBN<<
t.x(),b.x(),n.x(),
t.y(),b.y(),n.y(),
t.z(),b.z(),n.z();
auto u=payload.tex_coords.x(),v=payload.tex_coords.y();
auto h=payload.texture->height,w=payload.texture->width;
auto dU = kh * kn * (payload.texture->getColor(u+1.0/w,v).norm()-payload.texture->getColor(u,v).norm());
auto dV = kh * kn * (payload.texture->getColor(u,v+1.0/h).norm()-payload.texture->getColor(u,v).norm());
auto ln=Vector3f(-dU,-dV,1.0);
normal=(TBN*ln).normalized();
Eigen::Vector3f result_color = {0, 0, 0};
result_color = normal;
return result_color * 255.f;
}
结果如下:

7.实现displacement mapping
和Bump mapping相比较,displacement mapping对实际点进行了更新。
Eigen::Vector3f displacement_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
float kh = 0.2, kn = 0.1;
// TODO: Implement displacement mapping here
// Let n = normal = (x, y, z)
// Vector t = (x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),z*y/sqrt(x*x+z*z))
// Vector b = n cross product t
// Matrix TBN = [t b n]
// dU = kh * kn * (h(u+1/w,v)-h(u,v))
// dV = kh * kn * (h(u,v+1/h)-h(u,v))
// Vector ln = (-dU, -dV, 1)
// Position p = p + kn * n * h(u,v)
// Normal n = normalize(TBN * ln)
auto n=normal.normalized();
auto x=n.x(),y=n.y(),z=n.z();
auto t=Vector3f(x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),z*y/sqrt(x*x+z*z));
auto b=n.cross(t);
Matrix3f TBN;
TBN<<
t.x(),b.x(),n.x(),
t.y(),b.y(),n.y(),
t.z(),b.z(),n.z();
auto u=payload.tex_coords.x(),v=payload.tex_coords.y();
auto h=payload.texture->height,w=payload.texture->width;
auto dU=kh * kn * (payload.texture->getColor(u+1.0/w,v).norm()-payload.texture->getColor(u,v).norm());
auto dV = kh * kn * (payload.texture->getColor(u,v+1.0/h).norm()-payload.texture->getColor(u,v).norm());
auto ln=Vector3f(-dU,-dV,1.0);
normal=(TBN*ln).normalized();
point+=kn*n*(payload.texture->getColor(u,v).norm());
Eigen::Vector3f result_color = {0, 0, 0};
n=normal;
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
// components are. Then, accumulate that result on the *result_color* object.
auto l=(light.position-point).normalized();
auto v=(eye_pos-point).normalized();
auto r=light.position-point;
auto h=(v+l).normalized();
auto I=light.intensity;
auto La=ka.cwiseProduct(amb_light_intensity);
auto Ld=kd.cwiseProduct(I/(r.dot(r)))*MAX(0.0,n.dot(l));
auto Ls=ks.cwiseProduct(I/(r.dot(r)))*pow((MAX(0.0,n.dot(h))),p);
result_color+=La+Ld+Ls;
}
return result_color * 255.f;
}
结果如下:
(。・∀・)ノ

 浙公网安备 33010602011771号
浙公网安备 33010602011771号