
31. 独立看门狗
一、IWDG简介
独立看门狗本质上是一个定时器,这个定时器有一个输出端,可以输出复位信号。该定时器是一个 12 位的递减计数器,当计数器的值减到 0 的时候,就会产生一个复位信号。如果在计数没减到 0 之前,重置计数器的值的话,那么就不会产生复位信号,这个动作我们称为 喂狗。看门狗功能由 VDD 电压域供电,在停止模式和待机模式下仍然可以工作。
二、IWDG框图
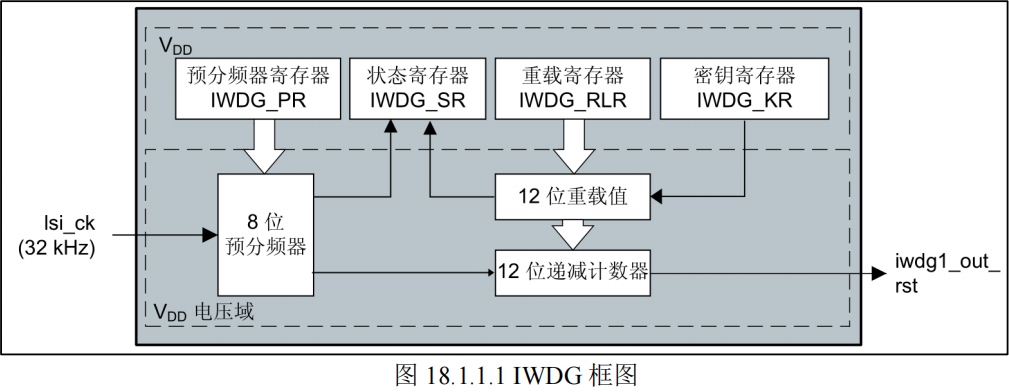
从 IWDG 框图整体认知就是,IWDG 有一个输入(时钟 LSI),经过一个 8 位的可编程预分频器提供时钟给一个 12 位递减计数器,满足条件就会输出一个复位信号(iwdg1_out_rst)。IWDG 内部输入/输出信号如下表:

STM32F407 的独立看门狗由内部专门的 32Khz 低速时钟(lsi_ck)驱动,即使主时钟发生故障,它也仍然有效。这里需要注意独立看门狗的时钟是一个内部 RC 时钟,所以并不是准确的 32Khz,而是在 17 ~ 47Khz 之间的一个可变化的时钟,只是我们在估算的时候,以 32Khz 的频率来计算,看门狗对时间的要求不是很精确,所以,时钟有些偏差,都是可以接受的。
三、IWDG溢出时间计算
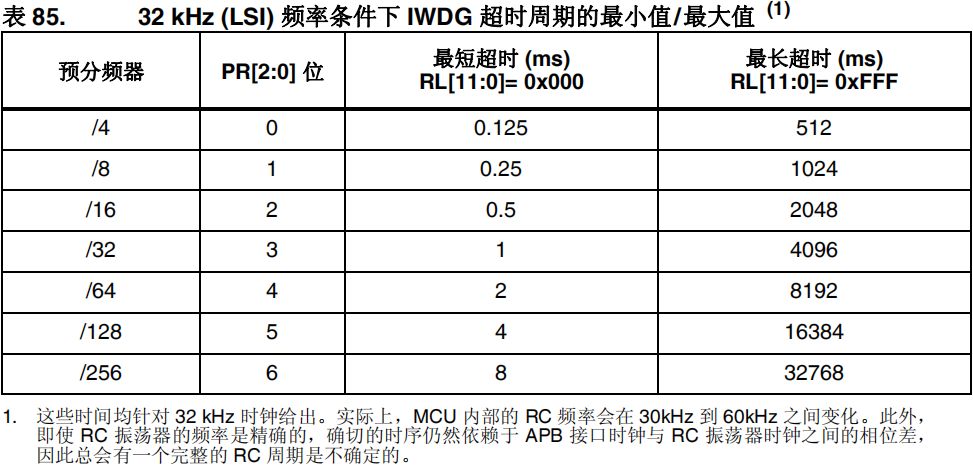
看门狗的喂狗时间(也就是看门狗溢出时间)的计算方式为:
其中 为看门狗溢出时间(单位为 ms)。prer 为看门狗时钟预分频值(IWDG_PR 值),范围为 0 ~ 7。rlr 为看门狗的重装载值(IWDG_RLR 的值)。
比如我们设定 prer 值为 4(4 代表的是 64 分频,HAL 库中可以使用宏定义标识符 IWDG_PRESCALER_64),rlr 值为 500,那么就可以得到 这样,看门狗的溢出时间就是 1s,只要你在一秒钟之内,有一次写入 0xAAAA 到 IWDG_KR,就不会导致看门狗复位(当然写入多次也是可以的)。这里需要提醒大家的是,看门狗的时钟不是准确的 32Khz,所以在喂狗的时候,最好不要太晚了,否则,有可能发生看门狗复位。
四、IWDG常用寄存器
4.1、关键字寄存器
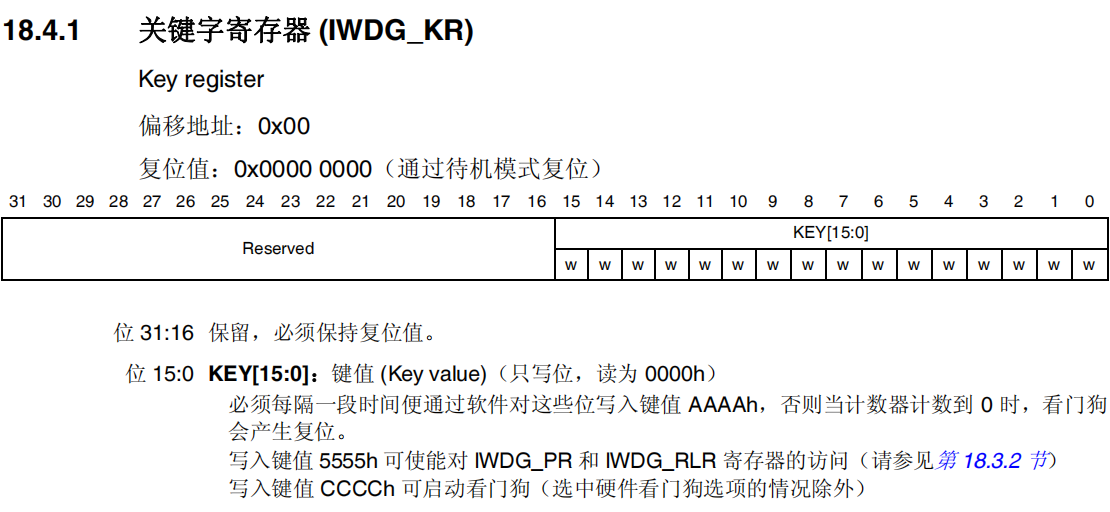
关键字寄存器可以看作是独立看门狗的控制寄存器。在关键字寄存器(IWDG_KR)中写入 0xCCCC,开始启用独立看门狗;此时计数器开始从其复位值 0xFFF 递减计数。当计数器计数到末尾 0x000 时,会产生一个复位信号(IWDG_RESET)。无论何时,只要关键字寄存器 IWDG_KR 中被写入 0xAAAA,IWDG_RLR 中的值就会被重新加载到计数器中从而避免产生看门狗复位。
IWDG_PR 和 IWDG_RLR 寄存器具有写保护功能。要修改这两个寄存器的值,必须先向IWDG_KR 寄存器中写入 0x5555。将其他值写入这个寄存器将会打乱操作顺序,寄存器将重新被保护。重装载操作(即写入 0xAAAA)也会启动写保护功能。
4.2、预分频寄存器
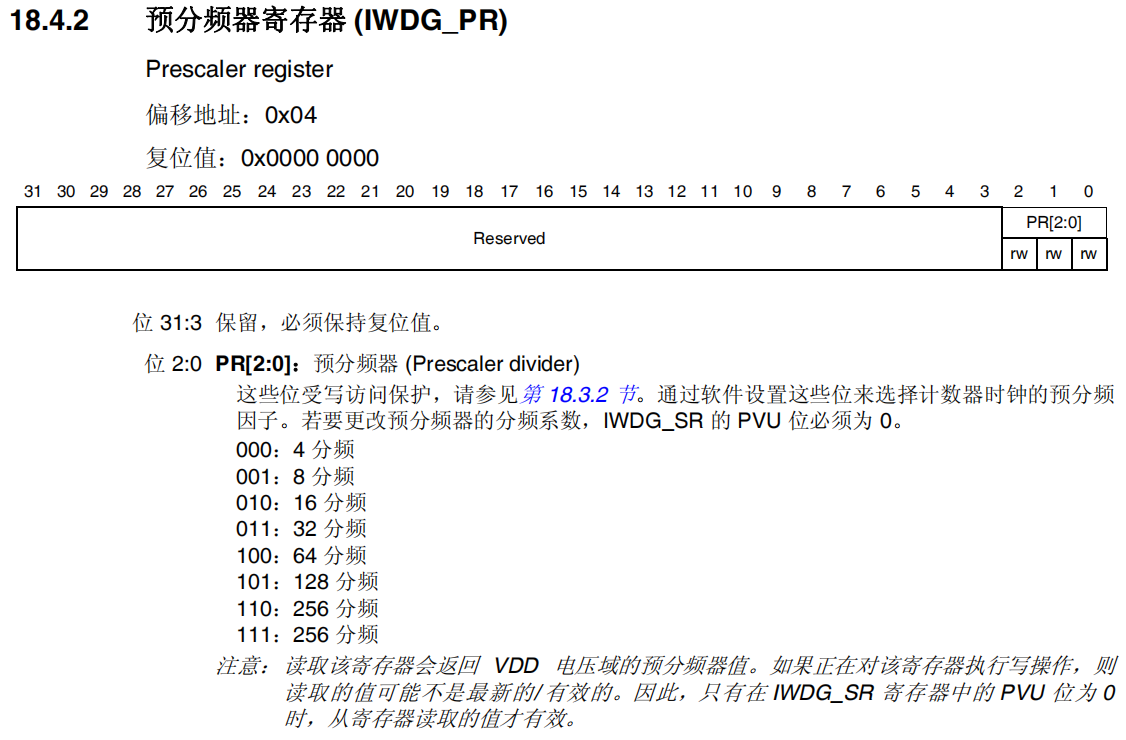
该寄存器用来设置看门狗时钟(LSI)的分频系数,最低为 4,最高为 256,该寄存器是一个 32 位的寄存器,但是我们只用了最低 3 位,其他都是保留位。
4.3、重载寄存器
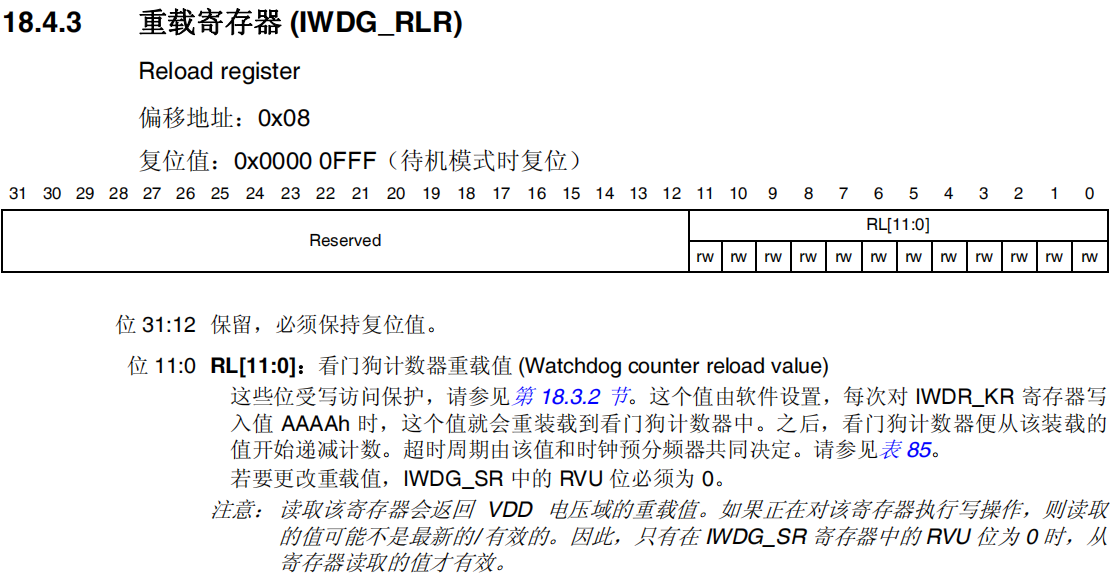
该寄存器用来保存重装载到计数器中的值。该寄存器也是一个 32 位寄存器,只有低 12 位是有效的。
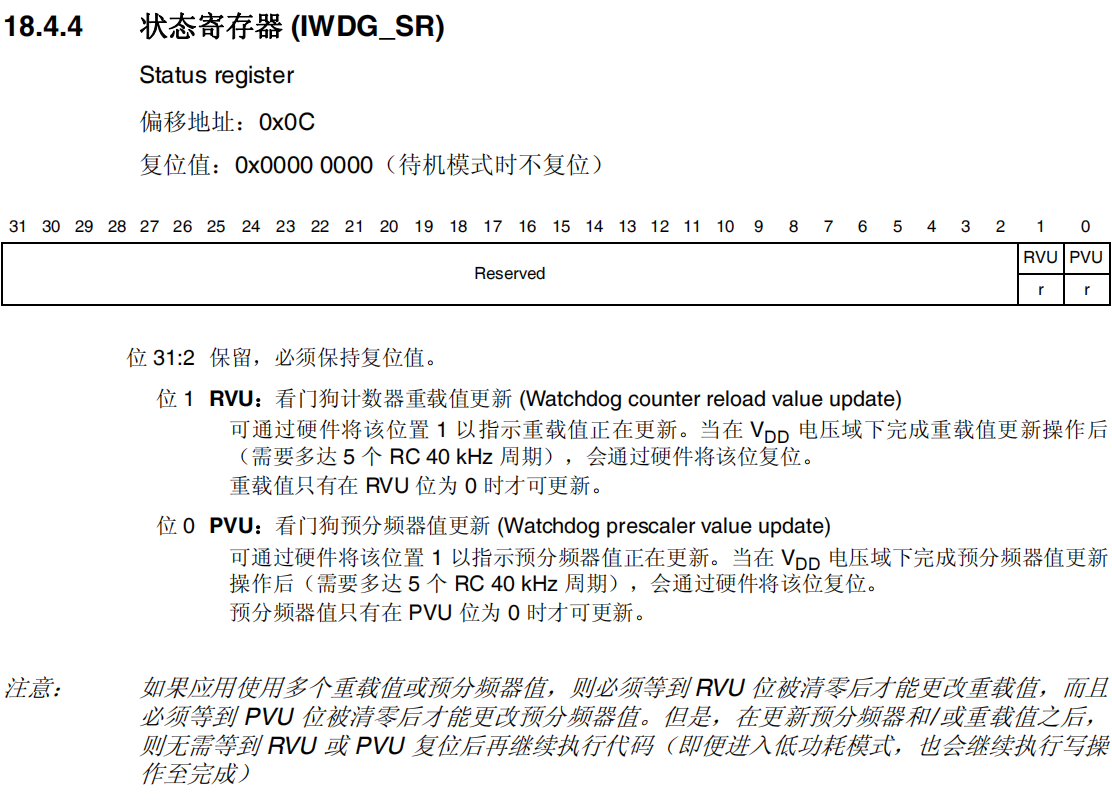
4.4、状态寄存器
五、IWDG配置步骤
5.1、配置IWDG工作参数
首先我们必须取消 IWDG_PR 和 IWDG_RLR 寄存器的写保护,这样才可以设置寄存器 IWDG_PR 和 IWDG_RLR 的值。取消写保护和设置预分频系数以及重装载值在 HAL 库中是通过函数 HAL_IWDG_Init() 实现的。
HAL_StatusTypeDef HAL_IWDG_Init(IWDG_HandleTypeDef *hiwdg);
形参 hiwdg 是 IWDG 句柄,IWDG_HandleTypeDef 结构体类型,其定义如下:
typedef struct
{
IWDG_TypeDef *Instance; // IWDG 寄存器基地址
IWDG_InitTypeDef Init; // IWDG 初始化参数
} IWDG_HandleTypeDef;
Instance:指向 IWDG 寄存器基地址,可选值如下:
#define IWDG ((IWDG_TypeDef *) IWDG_BASE)
Init:IWDG 初始化结构体,用于配置计数器的相关参数。
typedef struct
{
uint32_t Prescaler; // 预分频系数
uint32_t Reload; // 重装载值
} IWDG_InitTypeDef;
Prescaler:预分频系数,可选值如下:
#define IWDG_PRESCALER_4 0x00000000u /*!< IWDG prescaler set to 4 */
#define IWDG_PRESCALER_8 IWDG_PR_PR_0 /*!< IWDG prescaler set to 8 */
#define IWDG_PRESCALER_16 IWDG_PR_PR_1 /*!< IWDG prescaler set to 16 */
#define IWDG_PRESCALER_32 (IWDG_PR_PR_1 | IWDG_PR_PR_0) /*!< IWDG prescaler set to 32 */
#define IWDG_PRESCALER_64 IWDG_PR_PR_2 /*!< IWDG prescaler set to 64 */
#define IWDG_PRESCALER_128 (IWDG_PR_PR_2 | IWDG_PR_PR_0) /*!< IWDG prescaler set to 128 */
#define IWDG_PRESCALER_256 (IWDG_PR_PR_2 | IWDG_PR_PR_1) /*!< IWDG prescaler set to 256 */
Reload:重装载值,范围:0 到 0x0FFF。
该函数的返回值是 HAL_StatusTypeDef 枚举类型的值,有 4 个,分别是 HAL_OK 表示 成功,HAL_ERROR 表示 错误,HAL_BUSY 表示 忙碌,HAL_TIMEOUT 表示 超时。
typedef enum
{
HAL_OK = 0x00U, // 成功
HAL_ERROR = 0x01U, // 错误
HAL_BUSY = 0x02U, // 忙碌
HAL_TIMEOUT = 0x03U // 超时
} HAL_StatusTypeDef;
5.2、启动IWDG
HAL 库函数里面启动独立看门狗是通过宏定义标识符来实现的:
#define __HAL_IWDG_START(__HANDLE__) WRITE_REG((__HANDLE__)->Instance->KR, IWDG_KEY_ENABLE)
我们只需要调用宏定义标识符 __HAL_IWDG_START(__HANDLE) 即可实现看门狗使能。实际上,当我们调用了看门狗初始化函数 HAL_IWDG_Init 之后,在内部已经调用了该宏启动看门狗。
5.3、喂狗
在 HAL 中重载计数值的函数是 HAL_IWDG_Refresh(),该函数的作用是把值 0xAAAA 写入到 IWDG_KR 寄存器,从而触发计数器重载,即实现独立看门狗的喂狗操作。
HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg);
形参 hiwdg 是 IWDG 句柄,IWDG_HandleTypeDef 结构体类型。
该函数的返回值是 HAL_StatusTypeDef 枚举类型的值,有 4 个,分别是 HAL_OK 表示 成功,HAL_ERROR 表示 错误,HAL_BUSY 表示 忙碌,HAL_TIMEOUT 表示 超时。
六、程序源码
IWDG 初始化函数:
IWDG_HandleTypeDef g_iwdg_handle; // 独立看门狗句柄
/**
* @brief IWDG初始化函数
*
* @param prescaler 预分频值
* @param reload 重载值
*/
void IWDG_Init(uint8_t prescaler, uint16_t reload)
{
g_iwdg_handle.Instance = IWDG; // IWDG寄存器基地址
g_iwdg_handle.Init.Prescaler = prescaler; // 预分频值
g_iwdg_handle.Init.Reload = reload; // 重载值
HAL_IWDG_Init(&g_iwdg_handle);
}
main() 函数:
int main(void)
{
HAL_Init();
System_Clock_Init(8, 336, 2, 7);
Delay_Init(168);
UART_Init(&g_usart1_handle, USART1, 115200);
Key_Init();
printf("你还没有喂狗,请及时喂狗!\r\n");
IWDG_Init(IWDG_PRESCALER_32, 1000);
while (1)
{
if (Key_Scan(0) == WKUP_PRESS)
{
HAL_IWDG_Refresh(&g_iwdg_handle); // 喂狗
printf("你已经进行喂狗了!\r\n");
}
HAL_Delay(10);
}
return 0;
}
在 main() 函数里,先初始化系统和用户的外设代码,然后先点亮 LED,在无限循环里开始获取并判断触摸按键是否按下,如果按下的话就喂狗,不是则延时 10ms,继续上述操作。当 1 秒钟后都没测到触摸按键按下,IWDG 就会产生一次复位信号,系统复位,可以看到 LED 因系统复位熄灭一次,再亮。反之,当按下触摸按键后,1 秒内再按下触摸按键,就会及时喂狗,结果就是系统不会复位,LED 也就不会闪烁。
IWDG_Init(IWDG_PRESCALER_32, 1000);
这个语句的第一个形参直接使用 HAL 库自定义的 IWDG_PRESCALER_64,即预分频系数为 64,重装载值是 500,所以可由公式得到 ,即溢出时间就是 1s。只要你在一秒钟之内,有一次写 0xAAAA 到 IWDG_KR,就不会导致看门狗复位(当然写入多次也是可以的)。这里需要提醒大家的是,看门狗的时钟不是准确的 32Khz,所以在喂狗的时候,最好不要太晚了,否则,有可能发生看门狗复位。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 如何调用 DeepSeek 的自然语言处理 API 接口并集成到在线客服系统
· 【译】Visual Studio 中新的强大生产力特性
· 2025年我用 Compose 写了一个 Todo App