遥感数字图像处理 期末考点总结
重要基础考点总结
一. 绪论
基本概念
- 图像: 物理世界中客观对象的一种表示
- 数字图像: 物体的数字表示(该物体本身也可能是图像), 则像素就是离散的单元, 量化的(整数)灰度就是数字量值
- 数字图像处理: 对一个物体的数字表示施加一系列的操作, 以得到所期望结果的过程
图像处理的两种观点
- 连续的方法
- 我们感兴趣的图像通常源自物理世界, 它们服从/可以/用连续数学/很好地描述的/规律
- 离散的方法
- 只有当一幅图像源于且终于数字形式时, 使用离散方法才是合理的
数字图像处理的主要内容
- 几何处理
- 算术处理
- 图像重建
- 图像编码
- 图像增强
- 图像复原
- 图像识别
- 图像理解
多但重要, 看教材了解每个的意思更容易背且避免论述题卡壳
(谐音: 计(几何)算(算术)重(重建)编(编码)且增(增强)幅(复原)视(识别)力(理解))
计算重编且增幅的视力
二. 遥感数字图像的获取和存储
遥感数字图像的级别和数据格式
-
级别: 你要使用的哪个级别的数据
-
格式: 什么格式是通用的
-
数据级别
- 0级产品: 未经过任何校正的原始图像数据
- 1级产品: 经过了初步辐射校正的图像数据
- 2级产品: 经过了系统级的几何校正
- 3级产品: 经过了几何精校正
-
通用数据格式:
- BSQ
- BIL
- BIP
-
特殊(专用)数据格式
- 陆地资源卫星L5的数据格式
- HDF数据格式
- TIFF图像格式GeoTIFF图像格式
-
基本参数
- 文件头大小
- 数据类型
- 行数, 列数, 波段数
三. 遥感数字图像的表示和度量
遥感图像模型
- 陆地遥感图像模型
- 水色遥感图像模型
- 大气遥感图像模型
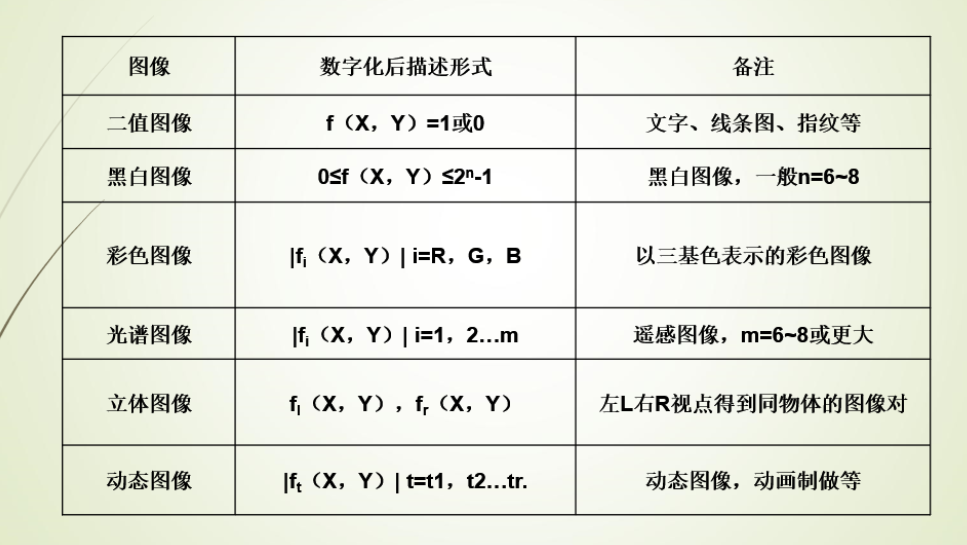
遥感图像的数字表示
- 数字图像的表示
-
图像的确定性表示
-
矩阵表示
-
向量表示
-
单波段图像的统计特征
- 基本的统计特征
- 像素值平均信息参数
- 均值
- 中值
- 众数
- 像素值变化信息参数
- 方差
- 变差
- 反差
- 像素值平均信息参数
- 直方图
- 图像灰度值的概率密度函数的离散化图形
多波段图像的统计特征
- 反映波段之间的关系
- 不再考虑空间位置
- 统计量包括
- 协方差
- 相关系数
- 反映了两个波段图像所包含的信息的重叠程度
窗口, 邻域和卷积
-
像素间的一些基本关系
-
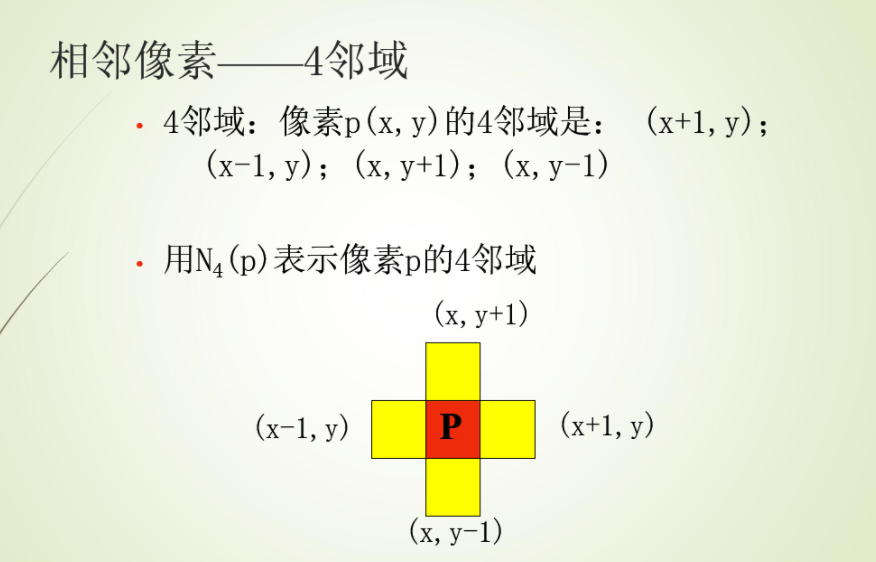
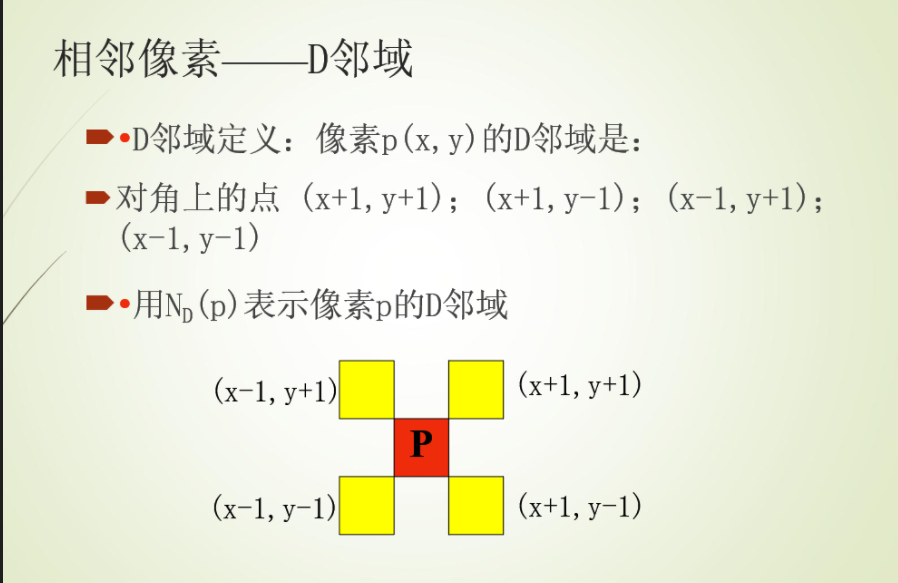
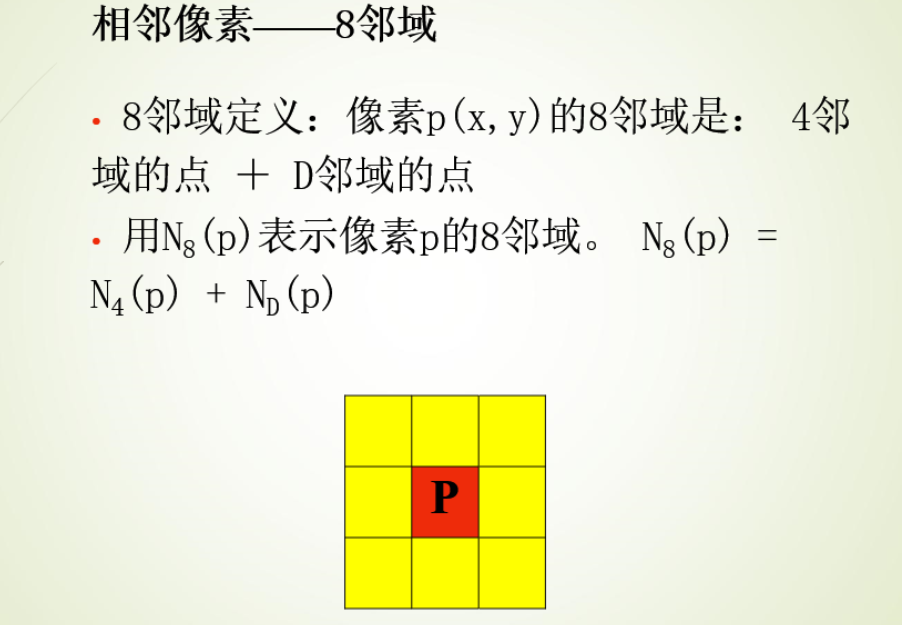
相邻像素
- 4邻域
- D邻域
- 8邻域
- 4邻域
-
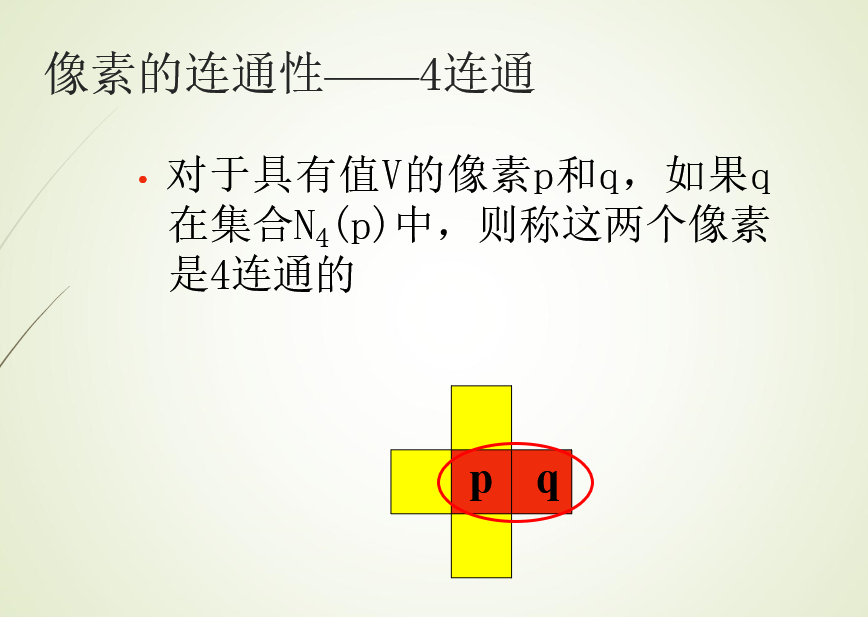
连通性
连通性是描述区域和边界的重要概念
两个像素连通的两个必要条件:
- 两个像素的位置相邻
- 两个像素的灰度值满足特定的相似性准则(或者相等)
- 4连通
- 8连通

- m连通

-
协方差和相关系数是两个基本的统计量,其值越高,表明两个波段图像之间的协变性越强
卷积
卷积是空间域上针对特定窗口进行的运算,是图像平滑, 锐化中使用的基本运算方法
(滤波的模板运算)
- 空间域滤波---卷积运算
- 频率域滤波---傅里叶变换

纹理
- 共生矩阵的运算
- 共生矩阵是用来描述纹理中灰度基元之间空间联系的基础, 反映了纹理中灰度分布的性质
- 共生矩阵求法(很重要)
共生矩阵的运算考试基本分为三种状态,如下:

其中a, b 指的是相对于像素点(x,y)中, 分别的增量. 比如: 目标点为(0 ,0), (a=1, b=0), 那么得到的新点位即为(1, 0), 将这两个点连接起来, 就是后面查找点对的一个"模子", 如下图中的蓝色标注: (从左到右数两个格子)

ok, 那么当目标点为(0, 0), ( a= -1, b = 0)的情况下, 意思就是从(0,0)向左移一位(-1, 0), 即后面运用的时候是从右往左数两个格子的.
上面a=1的情况要求数据中模子对应的两个格子中的数值为共生矩阵的(x, y) [具体思路请看上面的博客], 要求的两个数据要求是"紧凑的"
而对于a=2的情况, 如果共生矩阵中 x = 0, y = 1, 那么在检索原数据表格时, 0 和 2 之间的距离要为 "2", 即中间要有个数字隔开. 对照(e)表和(b)表, 发现(0, *, 2) 一共有九对, 那么就在共生矩阵的(0, 2) 坐标上填9.
总结:
- 先看a, b 值. 得出模子(要么挨一起, 要么隔一个)
- 先是(0, 0)点, 把坐标点按顺序(看ab值正负)放进模子里, 去数据表格中对应找能符合模子的点对(一行一行算)
- 在对应坐标处填写找到的个数
- 根据共生矩阵的坐标, 从(0,0) 一直到最后(根据要求, 一般是3x3, 也就是到(3,3))
图像处理的视角
- 图像空间
图像本身即图像空间, 具有二维坐标, 是数字的直观表述, 图像空间的坐标为行列或地理坐标(几何纠正后), 由像素构成
- 光谱空间
光谱空间表达了波长(或波段)与像素值(原始DN值或反射率等)之间的关系, 横坐标是波长或波段, 纵坐标是像素值
- 特征空间
任意两个或多个特征所构成的像素空间即为特征空间, 用来表达像素与特征的关系
四. 图像显示和拉伸
图像拉伸
拉伸是最基本的图像处理方法, 主要用来改善图像显示的对比度
线性拉伸
- 全域线性拉伸
- 分段线性拉伸
- 已知地物的灰度范围, 通过分段线性拉伸突出该地物的细节信息
非线性拉伸
如果拉伸函数是非线性的, 即为非线性拉伸: 指数函数, 对数函数, 平方根, 高斯函数
- 指数变换
- 对于亮的部分, 指数变换扩大了灰度间隔, 突出了细节
- 对于暗的部分, 缩小了灰度间隔, 弱化了细节
色彩的合成
-
分类
- 伪彩色合成
- 真彩色合成
- 假彩色合成
- 模拟真彩色合成
-
密度分割
对单波段遥感图像按灰度分级, 对每级赋予不同的色彩, 使之变为一幅彩色图像
- 主要用于伪彩色合成
-
色彩关系与区别
- 全彩色图像处理是对彩色图像进行彩色增强处理,其目的是突出图像中的有用信息
- 伪彩色图像处理是将黑白图像转化为彩色图像主要目的是提高人眼对图像的细节分辨能力一达到图像增强的目的
五. 图像的校正
降质类型
-
辐射失真
- 表现
- 遥感传感器测得的值与地物实际的光谱值不同
- 原因
- 遥感传感器本身特性:光学摄影机, 光电扫描仪
- 地物光照条件: 太阳位置(高度角, 方位角), 地形起伏
- 大气作用: 散射降低了遥感图像的反差
- 各检测器的特性差别, 干扰, 故障--->条纹, 斑点
- 表现
-
几何畸变
- 表现
- 图像几何位置的失真
- 表现
六. 图像变换
傅里叶变换(建议深入学习, 比较复杂, 但挺有意思)
[Fourier Series MIT courses](Fourier Series - YouTube)
- 目的
- 进行数据压缩, 图像的增强, 特征提取
- 方法
- 信号处理中的频率域分析方法
- 流程
- 选择适当的变换函数
- 进行傅里叶变换
- 分析变换的结果, 确定滤波器
- 进行傅里叶逆变换
傅里叶级数
主成分变换
- 分类
- K-L变换
- PCA变换
- Hotelling变换
- 目的
- 减少图像波段之间的相关性, 去除多余的值
- 方法
- 统计学中的正交变换方法
HSI彩色变换
-
概念
- H: hue 色调
- I: Intensity 强度
- S Saturation 饱和度
- HSI: 从人眼的主观感受出发描述颜色
-
分类
- 球体变换
- 圆柱体变换
-
方式
- HLS: H在0-3600之间变化, L,S在0,1之间变化
- HSV: H在0-3600之间变化, H和S在0,1之间变化
波段运算
植被指数
是对地表绿色植物生长状况和分布特征的简单, 有效和经验型的度量, 是两个或多个光谱波段的线性或非线性的组合.
- 重要特点
- 起着中间变量的作用, 可以转换为植物叶冠的生物物理参数, 例如, 生物量, 叶面指数, 光合作用有效吸收辐射等
- 常用红色波段(600-700)和近红外波段(700-1100)的组合来计算
图像融合
在遥感图像中, 图像融合多指多传感器, 多时段, 多分辨率图像的融合
七. 图像滤波
空间域图像滤波是在图像空间(x,y)对输入图像应用滤波函数来改进输出图像的处理方法
- 均值滤波
- 对高斯噪声比较有效
- 去掉尖锐噪声的同时会造成图像模糊
- 中值滤波(非线性平滑滤波器)
- 针对一维的某些特定的输入信号
- 对于二维信号, 中值滤波不变性要复杂很多
- 可用来减弱随机干扰和脉冲干扰
- 对随机输入吸纳后数学分析比较复杂
- 中值滤波的输出与输入噪声的概率密度分布有关, 而均值滤波的输出则与之无关
- 空间域滤波与频率域滤波的对比
在空间域滤波中, 滤波结果为输入图像和滤波模板的卷积, 窗口需要逐像素遍历整个图像, 因此, 如果滤波中使用的窗口较大, 且图像的行列数较多, 则计算速度较慢. 优点是, 滤波模板的意义清晰, 便于设计, 计算过程容易理解.
在频率域滤波中, 滤波结果是频率域图像和滤波器的点积(均为二维矩阵), 滤波器的数据组织方式和空间域滤波中的滤波模板相似, 是与输入图像大小相等的离散的矩阵, 滤波器中的数值利用传递函数计算产生, 因此计算速度快. 但是, 二维图像的频率域和空间域图像中的像素并非是一一对应关系, 这使得具体频率数值的解释较难, 往往无法直接利用频率信息来确定传递函数中的参数.


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:基于图像分类模型对图像进行分类
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· ollama系列01:轻松3步本地部署deepseek,普通电脑可用
· 25岁的心里话
· 按钮权限的设计及实现