机器学习技法 之 聚合模型(Aggregation Model)
聚合模型实际上就是将许多模型聚合在一起,从而使其分类性能更佳。
aggregation models: mix or combine hypotheses (for better performance)
下面举个例子:
你有 \(T\) 朋友,他们对于股票涨停的预测表现为 \(g_1,\cdots ,g_T\)。 常见的聚合(aggregation)方法有:
- select the most trust-worthy friend from their usual performance
根据他们的平常表现,选出最值得信任的朋友
$$
G(\mathbf{x})=g_{t_{}}(\mathbf{x}) \text { with } t_{}=\operatorname{argmin}{t \in{1,2, \ldots, T}} E{\text {val }}\left(g_{t}^{-}\right)\[\]将所有朋友的预测取平均值\[\]\[\]将所有朋友的预测值取加权平均值\[\]\[\]根据当前状态 \(\mathbf{x}\) 确定权重后结合。\[G(\mathbf{x})=\operatorname{sign}\left(\sum_{t=1}^{T} q_{t}(\mathbf{x}) \cdot g_{t}(\mathbf{x})\right) \text { with } q_{t}(\mathbf{x}) \geq 0 \]
学到这里,可能有一种感觉,与模型选择比较相近,并根据直观印象,取平均获得是分类器一定比最好的差,比最差的好。所以会感觉 aggregation 用处不大,那现在看一下, aggregation 的真正的用处是什么?
以下图为例:
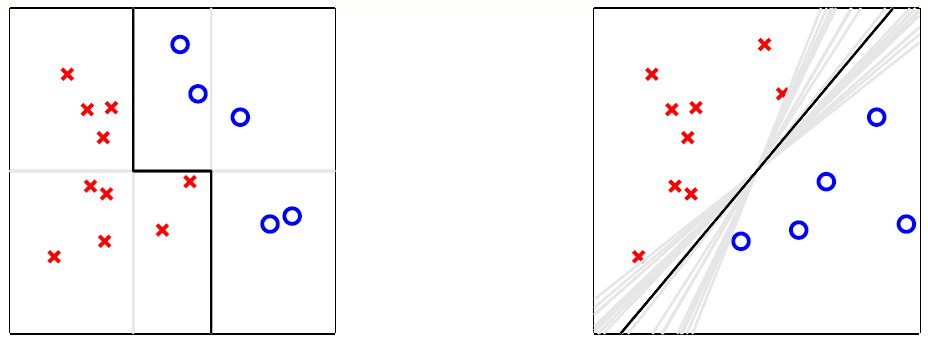
左侧第一个图中,实际上是使用三条竖线或横线实现了二分类,虽然竖线或横线是很弱的一种分类器,但是如此结合便获得了一个较强的分类器,其分类效果好于任何一个分类器独自分类的结果。
右侧第一个图中,是许多直线的取平均值获得的,这种状态存在于数据样本较少时,可以获取一种与SVM类似的效果,虽然这么多直线对于训练样本(采样数据)的分类效果一样,但是对于测试样本(全局数据)可能有更好的分类效果。
所以说真正的 aggregation 并不只是单纯的取平均而已,其可能是为了弥补当前分类器的不足(分类器分类性能较弱,分类器的泛化能力较弱)。即合理的聚合(aggregation)代表了更好的性能(performance)。
Blending
均值融合(uniform blending)
用于分类:
数学表达如下:
有 \(T\) 个人,每人一票。当 \(g_{t}\) 预测值相近,那么性能不变。当 \(g_{t}\) 多样民主时,少数服从多数(majority can correct minority)
在多分类中的数学表达为:
用于回归:
当 \(g_{t}\) 预测值相近,那么性能不变。当 \(g_{t}\) 多样民主时,一些分类结果 \(g_{t}(\mathbf{x})>f(\mathbf{x})\) ,另一些分类结果 \(g_{t}(\mathbf{x})<f(\mathbf{x})\),那么理想状态取平均可以获得最佳解。
综合上述两种需求,多样性的 hypotheses 更容易使得融合模型性能更佳。
现在进行理论分析,其性能是否改善,这里以回归模型为例:
这里的取平均是针对全部的 hypothesis 或者说 \(T\) 个 \(g_t\) 进行的,并针对的是随机的单个样本。
也就是说,在对全部训练样本 \(\mathbf{x}_n\) 进行分析取全部误差的平均值。这里 用\(\mathcal{E}\) 表示平均值。举个例子:\(\frac{1}{N}\sum_{n = 1}^{N}\left(g_{t}(\mathrm{x}_n)-f(\mathrm{x}_n)\right)^{2} = \mathcal{E}\left(g_{t}-f\right)^{2}\)。
即 \(G\) 优于 \(g_t\) 的平均值。
现在假设在分布为 \(P^{N}\) (i.i.d.) 的数据上选取大小为 \(N\) 的数据集 \(\mathcal{D}_{t}\),并通过 \(\mathcal{A}\left(\mathcal{D}_{t}\right)\) 获取 \(g_{t}\)。那么执行无数次可以获取到 \(\bar g\),表达式如下:
那么现在用 \(\bar{g}\) 代替 \(G\),之前所求仍然成立,即:
其中
- \(\operatorname{avg}\left(E_{\text {out }}\left(g_{t}\right)\right)\) 代表了算法的期望性能(expected performance of A)。
- \(E_{\text {out }}(\bar{g})\) 代表了共识性能(performance of consensus),又叫偏差(bias)
- \(\operatorname{avg}\left(\mathcal{E}\left(g_{t}-\bar{g}\right)^{2}\right)\) 代表了共识的期望偏差(expected deviation to consensus),又叫方差(variance)
线性融合(Linear Blending)
用于分类:
数学表达如下:
与均值融合相似,有 \(T\) 个人,但是每人 \(\alpha_t\) 票,而不是都只有一票。
用于回归:
这里重温一下线性回归加非线性转换的结合模型,其数学表达如下:
可以看出两种非常相似。
所以说线性融合就是线性回归使用假设函数作为非线性转换工具,并且有约束条件。
那么该最优化问题可以写为:
在实际运用中,常常不用约束条件 \(\alpha_t > 0\),因为:
也就是说认为 \(g_t\) 的分类错误很高,与预测值常常相反。那么取反便会得到较好性能的分类器。
与模型选择一样,虽然使用训练集获取 \(g_t\),但是最好使用验证集获取 \(\alpha_t\)。
堆叠融合(Stacking or Any Blending)
前面提到的均值融合和线性融合实际上类似于滤波,将预测值乘以一个系数后输出,若将其视为一个模型,那么该模型表达式为 \(\tilde g(g_1,g_2,\cdots,g_T) = \alpha_1 g_1 + \alpha_2 g_2 + \cdots + \alpha_T g_T\)。那么 blending 的一般形式便不局限于输入参数的线性组合,可能 \(\tilde g\) 是也是一个 hypothesis。
Given \(g_{1}^{-}, g_{2}^{-}, \ldots, g_{T}^{-}\) from \(\mathcal{D}_{\text {train }},\) transform \(\left(\mathbf{x}_{n}, y_{n}\right)\) in \(\mathcal{D}_{\text {val }}\) to \(\left(\mathbf{z}_{n}=\Phi^{-}\left(\mathbf{x}_{n}\right), y_{n}\right),\) where
学习步骤如下:
- 从训练集 \(\mathcal{D}_{\text {train}}\) 中获取 \(g_{1}^{-}, g_{2}^{-}, \ldots, g_{T}^{-}\),将验证集数据映射到 \(\mathcal Z\) 空间,即 \(\mathbf{z}_{n}=\left(\Phi^{-}\left(\mathbf{x}_{n}\right), y_{n}\right)\) ,其中映射函数为:\(\Phi^{-}(\mathbf{x})=\left(g_{1}^{-}(\mathbf{x}), \ldots, g_{T}^{-}(\mathbf{x})\right)\)
- 在 \(\mathcal{Z}\) 空间训练出融合各种模型的模型(函数) \(\tilde{g}\) \(=\) AnyModel \(\left(\left\{\left(\mathbf{z}_{n}, y_{n}\right)\right\}\right)\)
- 最终的堆叠融合模型 \(G_{\mathrm{ANYB}}(\mathbf{x})=\tilde{g}(\Phi(\mathbf{x}))\)。
优缺点:
- 很强大(powerful),可以完成有条件的融合(conditional blending)
- 很容易过拟合(模型复杂度过高)
应用(Blending in Practice)
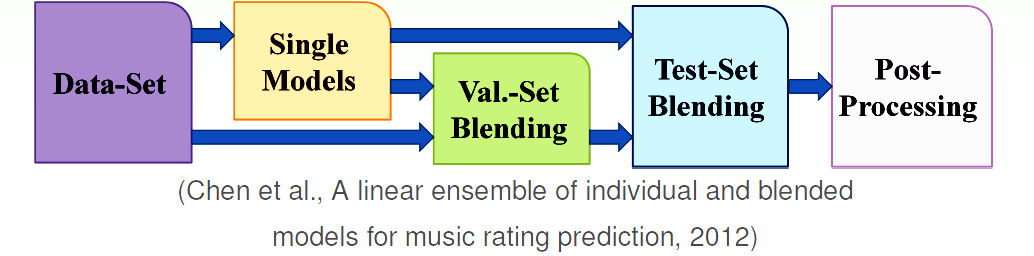
在 any blending 的基础上,将原来的 \(g_t\) 和 \(G\) 结合在一起再做一次融合。
Bagging
blending : 在获取 \(g_t\) 之后,进行聚合;
learning : 在聚合(学习)过程中获取 \(g_t\)。
获得多样 \(g_t\) 的方法有:
- diversity by different models
- diversity by different parameters: 例如优化方法GD的步长变化多样
- diversity by algorithmic randomness
- diversity by data randomness
下面便从数据出发,来满足假设函数的多样性。
那应该怎么做呢,在前面提到有共识便是一个模型的期望表现:
其优于单个的 \(g_t\)。
其由两个部分组成,一个是无穷多个 \(g_t\),另一个则是丰富的样本数据。对于第一个问题这里提供有限个但相当多个 \(g_t\),第二个问题只能从手中的数据入手,来创造多样的样本数据集 \(\mathcal{D}_t\)。
拔靴法(Bootstrap Aggregation)
Bagging 实际上就是指 Bootstrap Aggregation,拔靴法实际上是从手中的数据重采样来获得仿真的 \(\mathcal{D}_t\)。其实现方法是:
- 在原有的大小为 \(N\) 的数据集 \(\mathcal{D}\) 上,有放回的采样 \(N^\prime\) 次获得仿真数据集 \(\tilde \mathcal{D} _ t \rightarrow\) 这一步便是 Bootstrap 操作。
- 通过 \(\mathcal A (\tilde \mathcal{D} _ t)\) 获取 \(g_t\),再使用均值融合获得:\(G = \operatorname {Uniform}(\{g_t\})\)。
拔靴法(bootstrap aggregation)是一种简单的基于基算法(base algorithm \(\mathcal A\))的融合算法(meta algorithm)。方法合理前提是:数据集的多样性和基算法 \(\mathcal A\) 对于随机数据敏感。
Adaptive Boosting
Adaptive Boosting (AdaBoost )实际上是从 Bagging 的核心 bootstrap 出发实现的一种融合算法。具体实现如下:
加权基算法(Weighted Base Algorithm)
数据集的构造相当于对于不同样本的权重不同,也就是说重采样(Re-sample)过程相当于重赋予权重(Re-weighting)过程:
假设重采样如下:
原来的误差计算如下:
现在则是:
其中 \(u_1 = 2,u_2 = 1,u_3 = 0,u_4 = 1\)。
那么袋中的每一个 \(g_t\) 都是通过最小化加权误差(bootstrap-weighted error)获得的。
所以加权基算法(Weighted Base Algorithm)的数学表达为:
那么通过重新赋值获取多样的 \(g_t\) 是另一种可行的方法:
假如两个 \(g_t\) 的获取方法如下:
什么时候两个人分类器会很不一样呢?就是当 \(g_t\) 对于权重 \(u _ { n } ^ { ( t ) }\) 的性能很好,但是 \(g_t\) 对于权重 \(u _ { n } ^ { ( t + 1) }\) 的性能很差,最差的 \(g\) 则是随机值也就是说有 50% 的概率会预测准确。即:
所以现在希望的效果是:
那么通过重新放缩权重(re-scaling (multiplying) weights)便可以实现,即:
对于 \(g_t\) 分类错误的样本:
对于 \(g_t\) 分类正确的样本:
那么在实际中如何实现呢?这里提出放缩系数。
放缩系数(Scaling Factor)
错误率 \(\epsilon _ { t }\) 定义如下:
放缩系数的定义如下:
那么:
Linear Aggregation on the Fly
有了上述的前提,便可以设计一个由数据多样化创造的融合算法,而AdaBoost 除了上述一些前提外,还有一步,那就是 Linear Aggregation on the Fly,在学习中获得线性融合的参数 \(\alpha_t\),即:
- 当 \(\epsilon _ { t } \rightarrow 0\) 时,\(\mathbf { \star } _ { t } \rightarrow \inf, \ln(\mathbf { \star } _ { t }) \rightarrow \inf\),也就是说当无错误时,给予无穷权重,即当前 \(g_t\) 完全可以完成任务。
- 当 \(\epsilon _ { t } = \frac{1}{2}\) 时,\(\mathbf { \star } _ { t } = 1, \ln(\mathbf { \star } _ { t }) = 0\)也就是说当错误率为1/2时,不给予权重,即 \(g_t\) 与随机数的性能一样无用。
- 当 \(\epsilon _ { t } \rightarrow 1\) 时,\(\mathbf { \star } _ { t } = 0, \ln(\mathbf { \star } _ { t }) \rightarrow -\inf\) 也就是说当全错误时,给予负无穷权重,即只需要将分类结果取反便可以获得非常高准确率的 \(g_t\)。
AdaBoost 实现步骤
\(u^{(1)} = \left[\frac{1}{N},\cdots,\frac{1}{N}\right]\)
for \(t = 1,\cdots,T\)
- 由 \(\mathcal { A } \left( \mathcal { D } , \mathbf { u } ^ { ( t ) } \right)\) 获取\(g _ { t }\) , 其中 \(\mathcal { A }\) 用于优化权重为 \(\mathbf { u } ^ { ( t ) }\) 的加权误差。
- 由 \(\mathbf { u } ^ { ( t ) }\) 更新 \(\mathbf { u } ^ { ( t+1 ) }\)\[\begin{aligned} \]
\left[ \kern-0.15em \left[y _ { n } = g _ { t } \left( \mathbf { x } _ { n } \right) \right] \kern-0.15em \right] \quad u ^ { ( t + 1 ) } _ n &\leftarrow u ^ { ( t ) } _n / \mathbf { \star } _ { t } \end{aligned}
$$
其中:$\epsilon _ { t } = \frac {\sum _ { n = 1 } ^ { N } u _ { n } ^ { ( t + 1 ) } \left[ \kern-0.15em \left[y _ { n } \neq g _ { t } \left( \mathbf { x } _ { n } \right) \right] \kern-0.15em \right] } { \sum _ { n = 1 } ^ { N } u _ { n } ^ { ( t + 1 ) } }$,$\mathbf { \star } _ { t } = \sqrt { \frac { 1 - \epsilon _ { t } } { \epsilon _ { t } } }$
- 计算线性融合系数 \(\alpha_t = \ln(\mathbf { \star } _ { t })\)
- 获得最终hypothesis: \(G ( \mathbf { x } ) = \operatorname { sign } \left( \sum _ { t = 1 } ^ { T } \alpha _ { t } g _ { t } ( \mathbf { x } ) \right)\)
理论证明(Theoretical Guarantee)
AdaBoost 的 VC bound 如下:
原作者有证明最多经过 \(T= \log(N)\) 次迭代,便可以实现 \(E_{\text{in}}(G) = 0\),只要基模型比随机数性能优越即可 \(\epsilon _ { t } \leq \epsilon < \frac { 1 } { 2 }\)。
也就是说,如果基模型 \(g\) 很弱(weak),但是总比随机数优秀,那么由AdaBoost + \(\mathcal A\) 获取的 \(G\) 也会很强(strong)。
决策树桩(Decision Stump)
数学表达如下:
一共有三个参数 特征(feature) \(i\),阈值(threshold)\(\theta\) ,方向(direction)\(s\)。其实现的功能便是一个分界点,特征(feature) \(i\) 表达的是在第 \(i\) 维的分解点,阈值(threshold)\(\theta\) 代表在本维度的分界点位于 \(\theta\),方向(direction)\(s\) 代表了分界点两边的样本类型。
这是一个弱模型,但是将其作为 AdaBoost 的基模型便可以实现高精度预测了,并且效率很高,时间复杂度为:\(O(d \cdot N \log N)\)
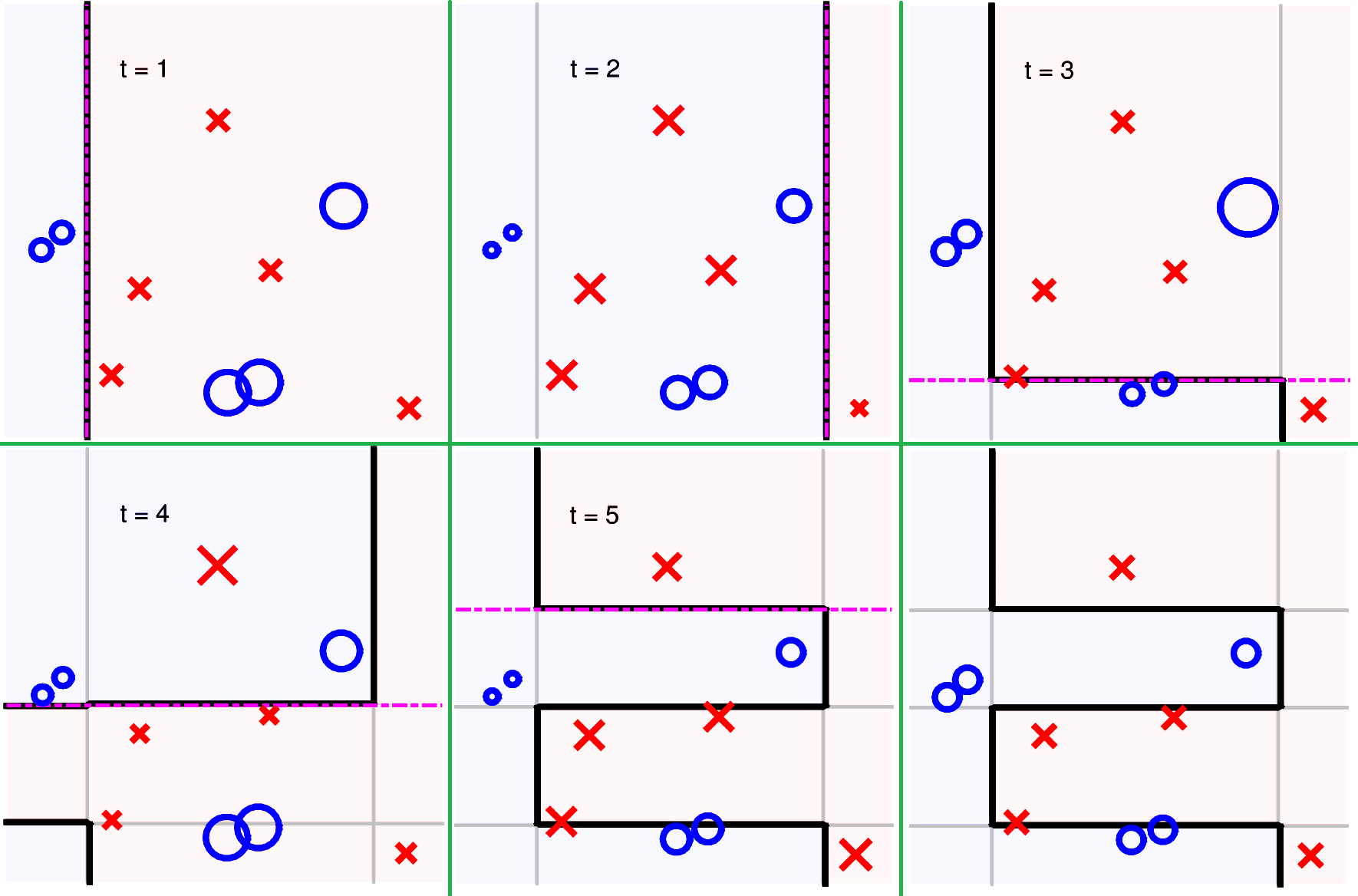
若使用 Decision Stump 作为 AdaBoost 的基模型,假设一个简单的数据集如下分布:
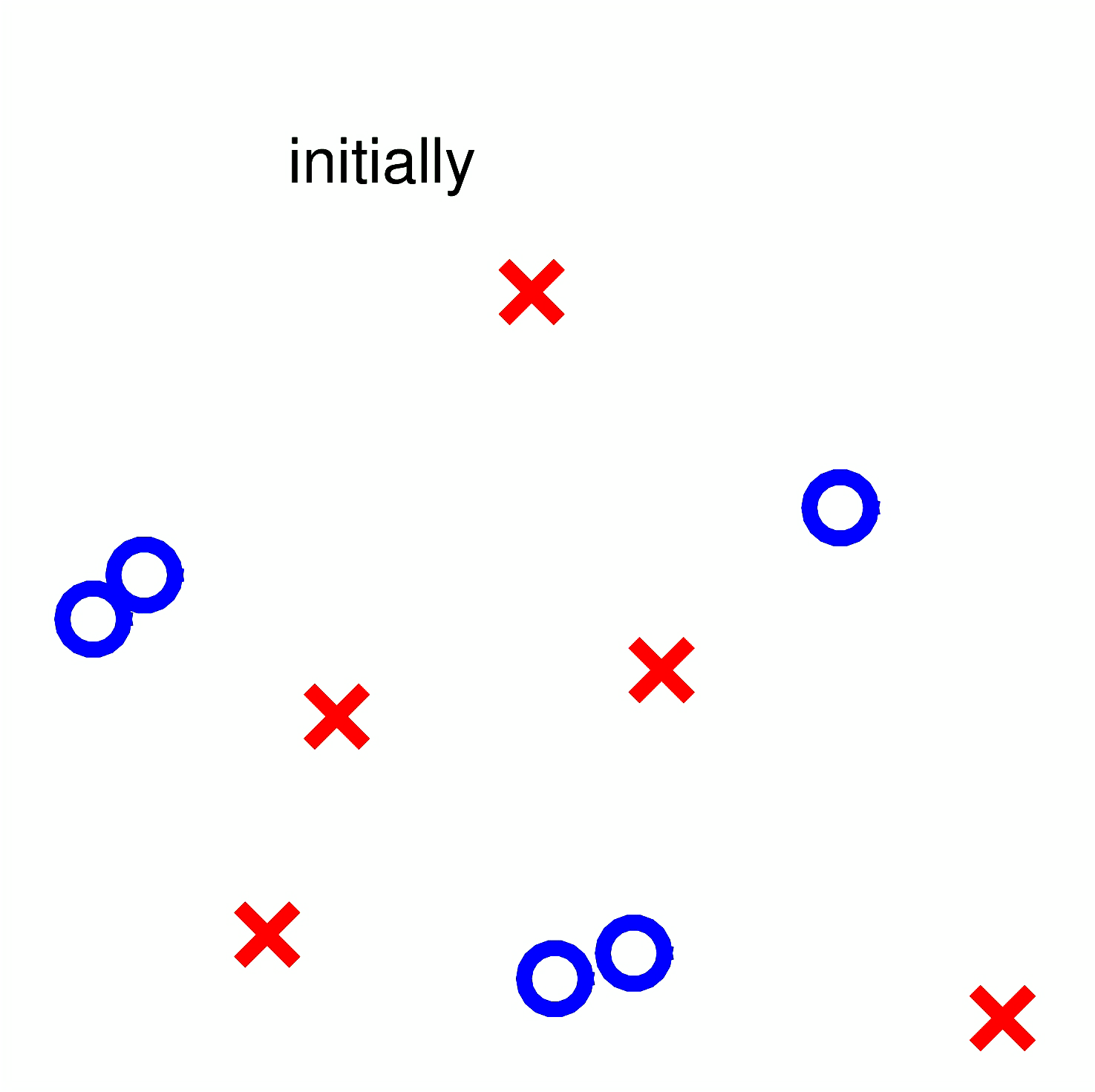
那么其学习过程的一种状态可能如下表达:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号