贝叶斯曲线拟合以及对L2正则化的贝叶斯解释
在以前文章中,我们讨论过《概率学派和贝叶斯学派的区别》 和《 <机器学习系列> 线性回归模型》 ,这里我们讨论下曲线拟合问题中的数据点的噪声问题,以及根据贝叶斯理论的L2正则化解释。
如有谬误,请联系指正。转载请注明出处。
联系方式: e-mail : FesianXu@163.comQQ : 973926198github : https://github.com/FesianXu
这里的曲线指的是多项式曲线(polynomial curve),如下图所示:
一般来说,概率学派按照最小化平方和误差函数,如下所示,来进行参数的学习的。(1.1) T θ = arg min θ L ( y ^ , y ) y ^ j = ∑ i = 0 N θ i x ( i , j ) i = y ( x ; θ ) L ( y ^ , y ) = 1 2 ∣ ∣ y ^ − y ∣ ∣ 2
\mathcal{T}_{\theta} = \arg \min_{\theta} \mathcal{L}(\hat{y},y) \\
\hat{y}_j = \sum_{i=0}^N \theta_i x_{(i,j)}^{i} = y(x;\theta)\\
\mathcal{L}(\hat{y}, y) = \dfrac{1}{2}||\hat{y}-y||^2
\tag{1.1}
T θ = arg θ min L ( y ^ , y ) y ^ j = i = 0 ∑ N θ i x ( i , j ) i = y ( x ; θ ) L ( y ^ , y ) = 2 1 ∣ ∣ y ^ − y ∣ ∣ 2 ( 1 . 1 ) x ( i , j ) x_{(i,j)} x ( i , j ) j j j i i i
但是按照上面策略进行曲线拟合是没有考虑到数据的不确定性(uncertainty)的,这种不确定性体现在数据是添加了噪声的,而基于直接估计出一个点,然后直接拟合的方式没有考虑到这种噪声。为了描述这种不确定性,我们接下来以一种概率的角度去看待曲线拟合问题。
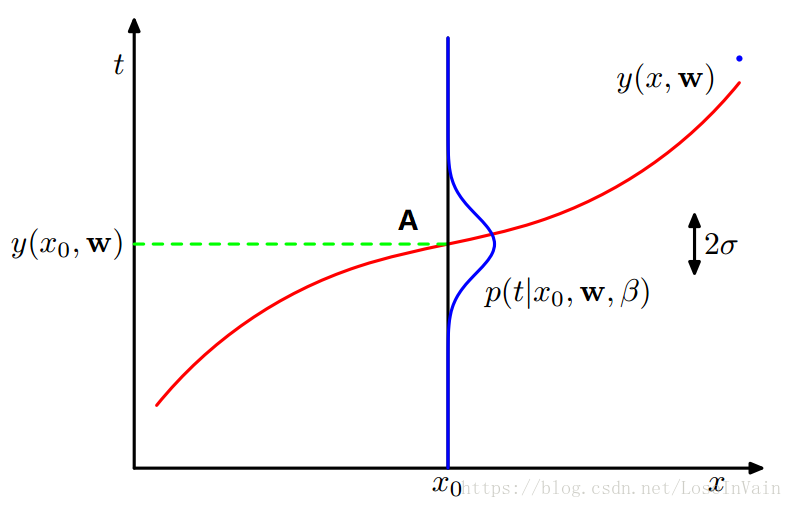
假设我们通过多项式模型预测出来的并不是一个单纯的数字,而是一个分布,一般来说我们将其假设为是一个均值为t t t σ 2 \sigma^2 σ 2 β = 1 σ 2 \beta=\dfrac{1}{\sigma^2} β = σ 2 1 β \beta β (1.2) p ( t ∣ x , w , β ) = N ( t ∣ y ( x , w ) , β − 1 )
p(t|x, \textbf{w}, \beta) = \mathcal{N} (t|y(x, \textbf{w}), \beta^{-1})
\tag{1.2}
p ( t ∣ x , w , β ) = N ( t ∣ y ( x , w ) , β − 1 ) ( 1 . 2 ) 我们假设数据添加的噪声是高斯噪声 ,既是:(1.3 数据的噪声分解模型) x o b s e r v e = x r e a l + N ( μ , σ 2 )
\mathbf{x}_{\rm{observe}} = \mathbf{x}_{\rm{real}}+\mathcal{N}(\mu,\sigma^2)
\tag{1.3 数据的噪声分解模型}
x o b s e r v e = x r e a l + N ( μ , σ 2 ) ( 1 . 3 数 据 的 噪 声 分 解 模 型 )
可以看出,对于某一个预测,其为一个分布(蓝色线),其中预测的均值的预期就是观察值点A,可以看出,参数β \beta β 2 σ 2\sigma 2 σ 2 σ 2\sigma 2 σ
如果采用频率学派中的观点,那么就会采用极大似然法 进行参数估计。似然函数如下所示:(1.4) p ( t ∣ x , w , β ) = ∏ i = 0 N N ( t n ∣ y ( x n , w ) , β − 1 )
p(\textbf{t}|\textbf{x},\textbf{w}, \beta) = \prod_{i=0}^N \mathcal{N} (t_n | y(x_n, \textbf{w}), \beta^{-1})
\tag{1.4}
p ( t ∣ x , w , β ) = i = 0 ∏ N N ( t n ∣ y ( x n , w ) , β − 1 ) ( 1 . 4 ) (1.5) L = ln p ( t ∣ x , w , β ) = − β 2 ∑ n = 1 N { y ( x n , w ) − t n } 2 + N 2 ln β − N 2 ln ( 2 π )
\mathcal{L} = \ln p(\textbf{t}|\textbf{x},\textbf{w}, \beta) \\
= -\dfrac{\beta}{2} \sum_{n=1}^N \{y(x_n, \textbf{w})-t_n\}^2 + \dfrac{N}{2}\ln \beta - \dfrac{N}{2} \ln (2\pi)
\tag{1.5}
L = ln p ( t ∣ x , w , β ) = − 2 β n = 1 ∑ N { y ( x n , w ) − t n } 2 + 2 N ln β − 2 N ln ( 2 π ) ( 1 . 5 ) w \mathbf{w} w L \mathcal{L} L w \mathbf{w} w w \mathbf{w} w β \beta β w \mathbf{w} w β = 1 \beta=1 β = 1 (1.6) L = − 1 2 ∑ n = 1 N { y ( x n , w ) − t n } 2 T = max w L = min w − L
\mathcal{L}
= -\dfrac{1}{2} \sum_{n=1}^N \{y(x_n, \textbf{w})-t_n\}^2 \\
\mathcal{T} = \max_{\mathbf{w}} \mathcal{L} = \min_{\mathbf{w}} \mathcal{-L}
\tag{1.6}
L = − 2 1 n = 1 ∑ N { y ( x n , w ) − t n } 2 T = w max L = w min − L ( 1 . 6 ) 平方和损失 ,因此我们得出结论:∇ \nabla ∇ 平方和损失,是在假设数据噪声符合0均值高斯分布的情况下推导出的。 ∇ \nabla ∇
当然,这里的精度β \beta β (1.7) 1 β ^ = 1 N ∑ n = 1 N { y ( x n , w ) ^ − t n } 2
\frac{1}{\hat{\beta}} = \frac{1}{N} \sum_{n=1}^N \{y(x_n,\hat{\mathbf{w})}-t_n\}^2
\tag{1.7}
β ^ 1 = N 1 n = 1 ∑ N { y ( x n , w ) ^ − t n } 2 ( 1 . 7 ) w ^ \hat{\mathbf{w}} w ^
注意到我们之前讨论的都是没有对参数w \mathbf{w} w w \mathbf{w} w α \alpha α (2.1 对参数的先验假设) p ( w ∣ α ) = N ( w ∣ 0 , α − 1 I ) = ( α 2 π ) ( M + 1 ) / 2 e x p { − α 2 w T w }
p(\mathbf{w}|\alpha) = \mathcal{N}(\mathbf{w}|\mathbf{0},\alpha^{-1}\mathbf{I}) \\
= (\frac{\alpha}{2\pi})^{(M+1)/2} \rm{exp}\{-\frac{\alpha}{2}\mathbf{w}^T\mathbf{w}\}
\tag{2.1 对参数的先验假设}
p ( w ∣ α ) = N ( w ∣ 0 , α − 1 I ) = ( 2 π α ) ( M + 1 ) / 2 e x p { − 2 α w T w } ( 2 . 1 对 参 数 的 先 验 假 设 ) M M M α \alpha α 超参数(hyperparameters) 。(2.2) p ( w ∣ x , t , α , β ) ∝ p ( t ∣ x , w , β ) p ( w ∣ α )
p(\mathbf{w}|\mathbf{x},\mathbf{t},\alpha,\beta) \propto p(\mathbf{t}|\mathbf{x},\mathbf{w},\beta)p(\mathbf{w}|\alpha)
\tag{2.2}
p ( w ∣ x , t , α , β ) ∝ p ( t ∣ x , w , β ) p ( w ∣ α ) ( 2 . 2 ) { x , t } \{\mathbf{x},\mathbf{t}\} { x , t } w \mathbf{w} w w \mathbf{w} w 最大后验概率法(MAximum Posterior,MAP) 。取(2.2)的负对数,我们有:(2.3) ln p ( w ∣ x , t , α , β ) ∝ ln p ( t ∣ x , w , β ) + ln p ( w ∣ α )
\ln{p(\mathbf{w}|\mathbf{x},\mathbf{t},\alpha,\beta)} \propto
\ln{p(\mathbf{t}|\mathbf{x},\mathbf{w},\beta)}+\ln{p(\mathbf{w}|\alpha)}
\tag{2.3}
ln p ( w ∣ x , t , α , β ) ∝ ln p ( t ∣ x , w , β ) + ln p ( w ∣ α ) ( 2 . 3 ) w \mathbf{w} w β 2 ∑ n = 1 N { y ( x n , w ) − t n } 2 + α 2 w T w ⇒ 1 2 ∑ n = 1 N { y ( x n , w ) − t n } 2 + α β w T w
\frac{\beta}{2}\sum_{n=1}^N \{y(x_n,\mathbf{w})-t_n\}^2+\frac{\alpha}{2}\mathbf{w}^T\mathbf{w} \\
\Rightarrow \frac{1}{2}\sum_{n=1}^N \{y(x_n,\mathbf{w})-t_n\}^2+\frac{\alpha}{\beta}\mathbf{w}^T\mathbf{w}
2 β n = 1 ∑ N { y ( x n , w ) − t n } 2 + 2 α w T w ⇒ 2 1 n = 1 ∑ N { y ( x n , w ) − t n } 2 + β α w T w γ = α β \gamma=\dfrac{\alpha}{\beta} γ = β α γ 2 w T w \dfrac{\gamma}{2}\mathbf{w}^T\mathbf{w} 2 γ w T w ∇ \nabla ∇ 在贝叶斯理论中,L2正则项是在参数w \mathbf{w} w γ \gamma γ ∇ \nabla ∇
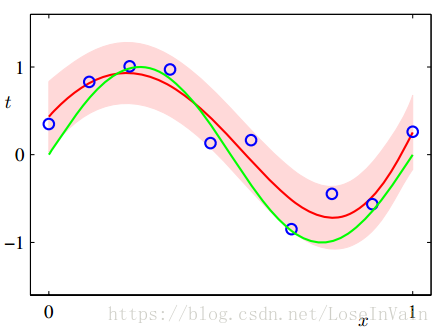
在上一步中,虽然我们根据最大后验法估计出了w \mathbf{w} w t ^ \hat{\mathbf{t}} t ^ w \mathbf{w} w t ^ \hat{\mathbf{t}} t ^ w \mathbf{w} w { x , t } \{\mathbf{x},\mathbf{t}\} { x , t } x x x t t t p ( t ∣ x , x , t ) p(t|x,\mathbf{x},\mathbf{t}) p ( t ∣ x , x , t ) (3.1) p ( t ∣ x , x , t ) = ∫ p ( t ∣ x , w ) p ( w ∣ x , t ) d w
p(t|x,\mathbf{x},\mathbf{t}) = \int p(t|x,\mathbf{w})p(\mathbf{w}|\mathbf{x},\mathbf{t}) \rm{d} \mathbf{w}
\tag{3.1}
p ( t ∣ x , x , t ) = ∫ p ( t ∣ x , w ) p ( w ∣ x , t ) d w ( 3 . 1 ) (3.2) p ( t ∣ x , x , t ) = N ( t ∣ m ( x ) , s 2 ( x ) )
p(t|x,\mathbf{x},\mathbf{t}) = \mathcal{N}(t|m(x),s^2(x))
\tag{3.2}
p ( t ∣ x , x , t ) = N ( t ∣ m ( x ) , s 2 ( x ) ) ( 3 . 2 ) (3.3) m ( x ) = β ϕ ( x ) T S ∑ n = 1 N ϕ ( x n ) t n
m(x) = \beta \phi(x)^T \mathbf{S} \sum_{n=1}^N \phi(x_n) t_n
\tag{3.3}
m ( x ) = β ϕ ( x ) T S n = 1 ∑ N ϕ ( x n ) t n ( 3 . 3 ) (3.4) s 2 ( x ) = β − 1 + ϕ ( x ) T S ϕ ( x )
s^2(x) = \beta^{-1}+\phi(x)^T\mathbf{S}\phi(x)
\tag{3.4}
s 2 ( x ) = β − 1 + ϕ ( x ) T S ϕ ( x ) ( 3 . 4 ) (3.5) S − 1 = α I + β ∑ n = 1 N ϕ ( x n ) ϕ ( x ) T
\mathbf{S}^{-1} = \alpha\mathbf{I}+\beta \sum_{n=1}^N \phi(x_n)\phi(x)^T
\tag{3.5}
S − 1 = α I + β n = 1 ∑ N ϕ ( x n ) ϕ ( x ) T ( 3 . 5 ) ϕ ( x ) = x i , i = 0 , ⋯  , M \phi(x)=x^i,i=0,\cdots,M ϕ ( x ) = x i , i = 0 , ⋯ , M m ( x ) m(x) m ( x ) x x x w \mathbf{w} w
[1] Bishop C M. Pattern recognition and machine learning (information science and statistics) springer-verlag new york[J]. Inc. Secaucus, NJ, USA, 2006.《概率学派和贝叶斯学派的区别》 《 <机器学习系列> 线性回归模型》 《随机梯度下降法,批量梯度下降法和小批量梯度下降法以及代码实现》 《机器学习模型的容量,过拟合与欠拟合》 《先验概率、后验概率以及共轭先验》


 浙公网安备 33010602011771号
浙公网安备 33010602011771号