
《土豆学Object Detection》 之 RCNN初探
文章目录
前言
本土豆最近在做Human-Object Interaction(HOI)任务的研究,其中有用到物体识别的模块,因此也打算趁此机会把Object Detection(OD)的拿来系统学习下,并且在此纪录下笔记。土豆我深知OD已经在网络上有着很多中文博客资料了,但是个人觉得很多都不够详细,不够入门级,因此我尽量在此博客里面做到提供更多的细节等,希望尽量做到初学者友好。不过毕竟土豆在OD还是初学者,如果文章有纰漏的地方,请联系指出,谢谢。
联系方式:
e-mail: FesianXu@gmail.com
QQ: 973926198
github: https://github.com/FesianXu
从物体识别说起
据我所知,Region-CNN也就是简称为RCNN的这篇文章[1]是最早的一批尝试将深度学习应用在物体识别这个任务上的,我觉得有必要先对之前的主流方向思路先描述下。
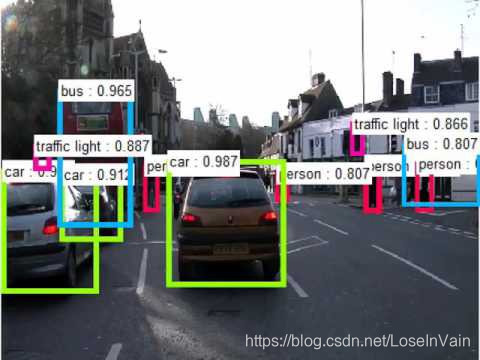
一般来说,物体识别这个任务需要在提供了一张图片的情况下,将图片中某些特定物体(由训练集里面的标签类别指定,如苹果,猫,狗等)的位置标记出来,这个标记需要提供该物体在图中的坐标和大小,这个标记我们一般称之为bounding box (bbox),如下图所示。其次需要对这个物体的类别进行分类,比如将此分类为狗,猫等,有些情况下还会给定这个分类的置信度等。其评价标准一般是mAP,mean Average Precision。
一般解决这个问题的思路很直接暴力,就是用设置多个不同尺寸的窗口,然后从图像的开始出开始遍历整个图像,得到不同尺寸的窗口的遍历集合之后,对每个窗口的图像片段进行物体分类判断,最后再考虑将其相同类别的窗口进行合并等,最后得到bbox和每个bbox的类别等。这个滑动窗口的方法叫做暴力搜索(Exhaustive Search),显然的,这种方法会导致运算量特别的大,因为由这种方法会产生大量的滑动窗口需要后续进行分类,而且,我们知道这些窗口很多都是背景或者是重复的,重叠的区块,因此其实对于后续来说是多余的。
那么为了解决这个问题,就提出了所谓的Selective Search [2]这种方法,这个方法尝试去从每个图像中单纯根据图像的纹理,光照,形状,颜色等底层的图像信息去提取中少量的窗口,这里将这个窗口称之为侯选框 Proposal。一般来说会对每个图片提取出约2000个侯选框,这个数量将远远小于暴力搜索的方法。
而后续,为了对每个侯选框进行分类,在深度学习之前,会考虑采用传统的人工设计的特征,如HOG,SIFT,DPM等,也会考虑用复合的特征,如UVA detection system[3]。那么在深度学习之后呢,就会考虑采用卷积神经网络去弄啦,这个也就是我们之后文章的主题了。
Region CNN
RCNN的思路虽然很简单,看起来不值得独立写成一篇博客,但是其实其中有很多细节值得注意,其在arxiv的原始论文也达到了21页之长[4],因此还是有必要仔细学习下细节的。主要需要注意的分为几个部分:
- 如何提取侯选框
- 这里使用的CNN如何设计
- 输入的图片该怎么进行尺寸统一化
- 类别分类器的设计
- 正负样本挑选
- 训练细节等
不过在陷入细节之前,我们要明确,整个RCNN的流程如:
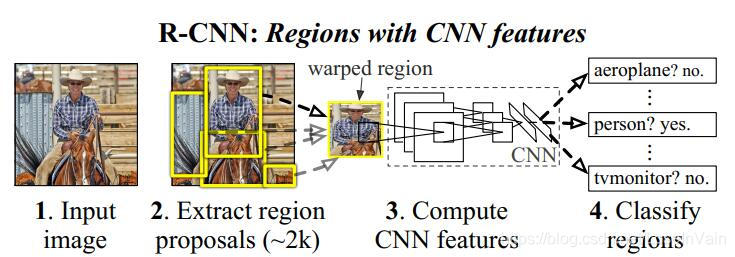
我们要注意到,RCNN并不是一个端到端的训练系统,而是分为了三大部分,一部分一部分分别地训练得到的,这三大部分有:
- CNN部分的fine tune
- SVM分类器的训练
- bbox回归的训练
也正是因为其训练不是端到端的,使得其训练过程颇为复杂。
如何提取侯选框
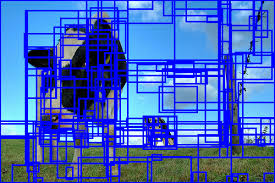
首先使用selective search先从每张图片中提取出2000个侯选框,注意这里的侯选框是所谓类别无关的,毕竟只是根据纹理等底层图像特征得到的。我们要注意到的是,这里的每个侯选框的尺寸可能都不一样,如Fig 2.2所示。因此在输入后续的CNN时,需要进行尺寸上的统一化,一般会统一到227 x 227这个尺寸,由此又有几种不同的统一化策略。
统一化这个尺寸除了单纯的线性缩放之外,还有考虑到上下文和原图比例的两种策略,见:
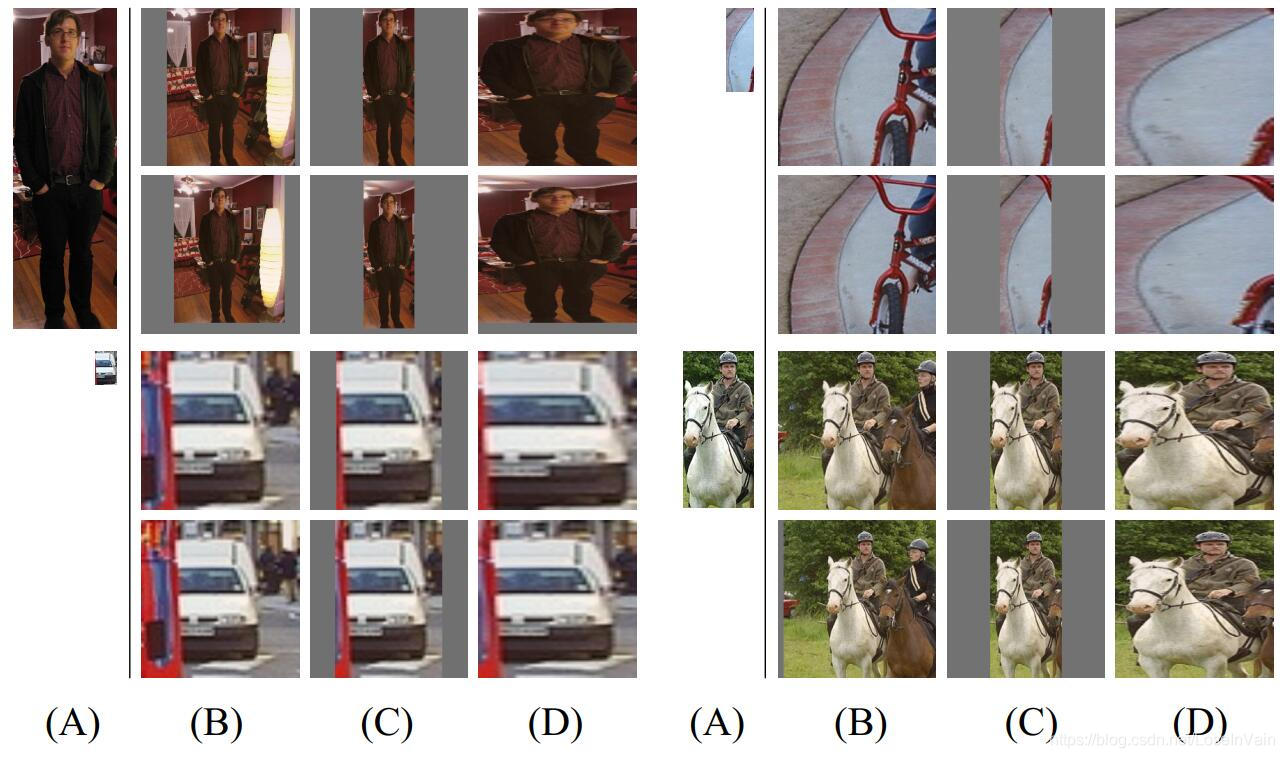
至此,我们得到了侯选框和经过统一化的侯选框图像,接下来可以喂进CNN了。
CNN的预训练和调整
这里的CNN特征提取网络比较了两种常用的网络,一种是T-net,也就是OxfordNet [5],另一种是O-net,也就是TorontoNet [6]。从结果来看,基于O-net的结果好了8个mAP,但是其速度慢了七倍,因此作者最后的实验还是基于T-net进行的。T-net的网络结构如Fig 2.4所示,这里的输入本应该是224 x 224的,不知道为什么在论文里统一化成了 227 x 227,不过这个对我们的研究影响并不大因此忽略不考虑。
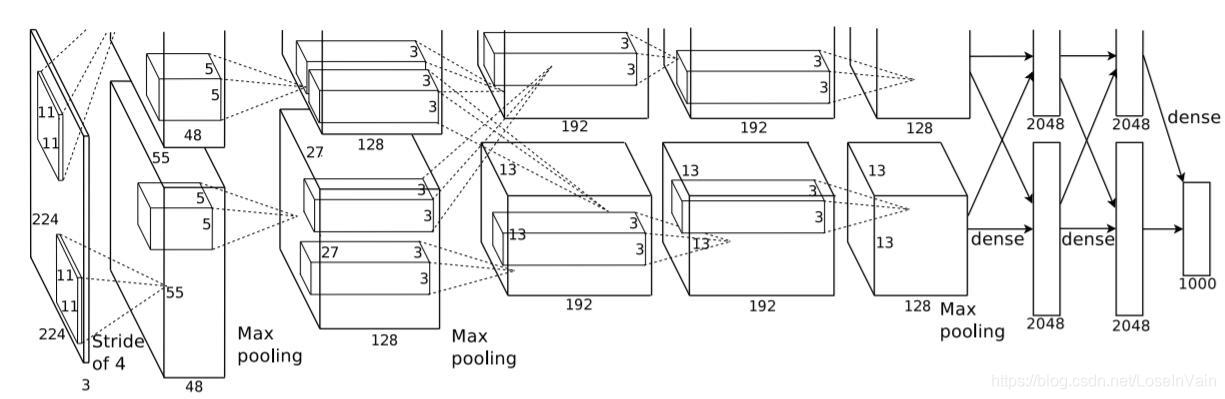
RCNN利用T-net从每个proposal中提取一个4096维的特征,我们会发现这里的4096维比起以前传统方法的,比如UVA detection system [3],维度少了两个数量级,分别是4k和360k,因此大幅度提高了运算速度。
显然,这个T-net首先需要预训练,一般是在ImageNet数据集(ILSVRC2012 classification )上利用图片级的标注(比如图片分类任务,不能利用其bbox的标签数据)先进行预训练。为了适应OD任务中个物体的分类,需要将T-net的最后一层的1000类分类的层更换成层,其中加上一表示背景。
我们注意到最后一层的池化层,也即是层,其输出特征图尺寸为维(按照论文中报告的,和Fig 2.4所示不同)。
类别分类器为什么不使用softmax
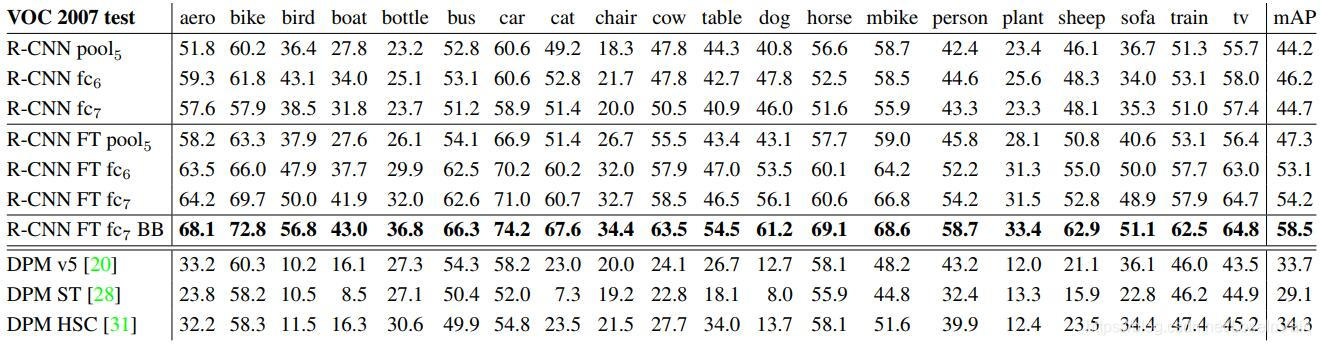
那么在上一步得到了proposal的特征之后,下一步就是拿到分类器中给每个proposal进行分类了。这里的分类器采用了线性SVM分类器,也即是给每个类别都指定了一个二类线性SVM分类器,用于判定是否是本类,见Fig 2.1。那么这里为什么不用softmax分类器而是采用传统的SVM呢?作者在实验中发现如果更改为softmax,那么在VOC 2007数据集上的表现将从54.2%下降到50.9%,作者认为是因为这里的正负样本采样,并没有特别强调精细的位置关系,因此softmax是在随机采样的负样本中进行训练的,而不是如同在SVM策略中,可以采用所谓的难负样本(hard negatives)进行训练。
这里的采用的SVM可以用一个权值矩阵表达,大小为, 其中表示的是类别数量,表示的是CNN输出的特征维度。那么因为一共有2000个侯选框,其实最后分类进行的是矩阵乘法 如形状为 和形状为 的矩阵的乘法。最后得到也就是对于所有侯选框的类别打分。
正负样本采样策略
为了训练SVM和对CNN进行OD任务相关的Fine-Tune(毕竟CNN是在物体分类任务上预训练的,不能很好适应OD任务特性),我们需要制定策略去对正负样本进行采样。
注意到对于这两种训练,其对正负样本的定义是不同的。
对于SVM训练而言
由于SVM是二分类器,因此需要对每个类独立训练一个SVM。
考虑到对一个二类分类器对车进行分类,如果proposal完全包含了车,那么当然,这个判断为正类;如果proposal是和车完全无关的事物,那么当然,其判断为负类。但是,如果是proposal一部分包含了车,一部分没有包含呢?这个时候需要依靠其proposal和真实的bbox的IoU的大小进行判断,小于这个阈值的视为负类,而真实的bbox则视为正类,这里根据实验设置为0.3(当然,可能会依据使用场合而调整)。
因此,依据这个简单的策略,对于每个类都划分了正类。因为SVM属于稀疏核方法,需要记忆住一部分的支持向量数据,因此如果将所有训练数据一次性喂进去模型,那么内存是撑不住的,因此作者使用了所谓的难负类挖掘方法(hard negative mining method)[8] 去找出最难分类正确的负类进行代表整个负类集合(因为一般来说,对于每个类都是负类的proposal要远大于正类的proposal数量。)
| 样本 | 来源 |
|---|---|
| 正样本 | Ground Truth |
| 负样本 | Ground Truth与proposal相交IoU 小于0.3的proposal |
对于CNN的fine tune而言
对于CNN的fine tune来说,正负样本的采样会复杂一点。
| 样本 | 来源 |
|---|---|
| 正样本 | Ground Truth与proposal相交IoU大于0.5的proposal |
| 负样本 | 与Ground Truth相交IoU小于等于0.5的proposal |
我们发现因为正样本数量远小于负样本数量,因此不单单采用了ground truth的bbox,而且与其IoU大于0.5的proposal都被当为了正样本,以此增加了正样本的数量。(文章说提高了30倍的正样本数)
对于bbox 回归任务而言
| 样本 | 来源 |
|---|---|
| 正样本 | 与ground truth相交IoU大于0.6的proposal |
非极大抑制 NMS
在进行完了以上的一系列步骤后,我们现在已经按理来说对2000个proposal进行了分类了,分类出个类。那么现在我们的情况可能如Fig 2.5所示,对于某个特定的类,比如猫,周围有一堆proposal,我们需要综合这若干个proposal的信息以得出一个最后的bbox预测结果,我们通常这个时候采用非极大抑制(Non Maximum suppression)。
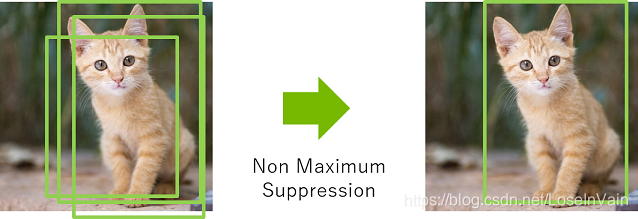
其操作很简单,对于某个类的proposal,我们知道每个proposal都会有对这个类别的打分,视为置信度,如果两个proposal之间的IoU大于一个阈值,则选取打分最高的留下来作为proposal,而另一个删除。若IoU小于这个阈值,那么就融合这两个proposal的并集作为结果。
bbox回归
用了以上的策略,我们的RCNN的表现已经能够超越以前的工作了,但是还不够。我们知道根据selective search选出来的侯选框直接决定了后续的物体的bbox的标定和类别的决定,但是selective search是一个静态过程,是不能学习的,也是不能调整的,这就直接决定了其bbox的效果固定了。这个很糟糕,应该是可以提高的。因此作者借鉴DPM模型[7]中的策略,对bbox进行回归,期待可以微调bbox的位置,取得更好效果。如Fig 3.1所示,我们将个训练样本表示为,其中表示第个样本的proposal中心的坐标和proposal的长宽。对应的, 表示的是真实的标签的bbox的坐标和长宽,因此在这个回归任务中,希望学习到函数,使得。
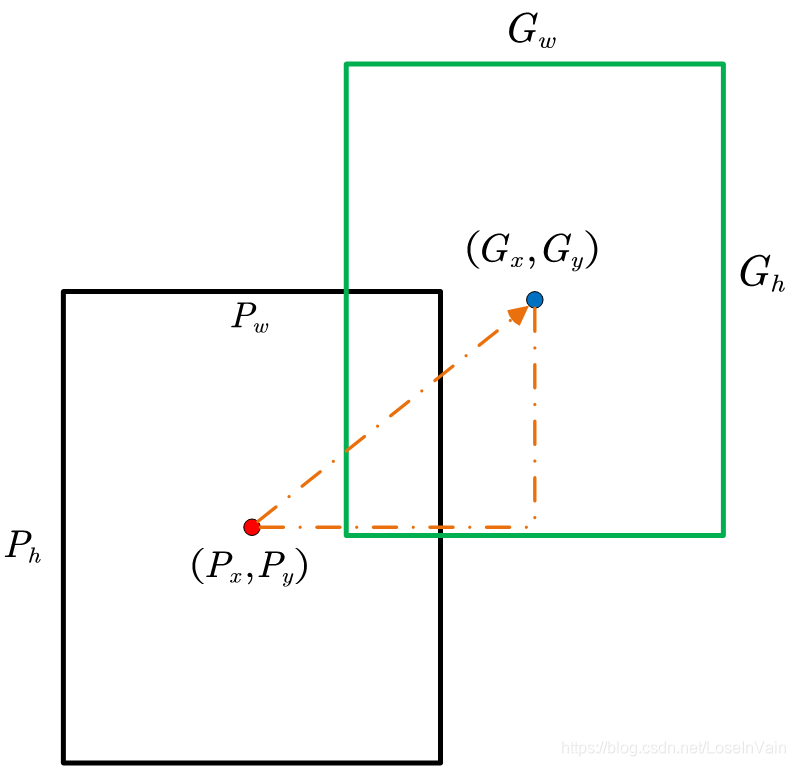
我们将这个拆解成四个函数,分别是。最后我们有对bbox回归后的估计结果为:
我们可以看到对于坐标而言,其是用求增量的形式进行的,而对于长宽则是直接的缩放。
为了简单起见,这里的采用的是线性回归,用池化层的输出作为的特征,也即是表示为,因此对于分别来说,都有。
最后用loss去描述,为:
在这个形式中,因为我们的目标可以表达成:
因此可以将其描述为标准的最小二乘法问题,求得其闭式解。
在实验中发现,这里的正则系数选择很重要,这里选择为1000。还有个问题我们要注意到的就是如果当这个和偏差的很大的时候,那么这个回归任务其实是没有太大意义的,只有当两者比较接近时,才能提供足够的优化效果。那么为了筛选出这个所谓的“足够接近”,作者在训练时,将proposal和真实的bbox的IoU(Intersection over Union)超过一定的阈值时(这里选择0.6),才认为是有效的可以进行回归的proposal,其他全部去掉。
在测试阶段,我们可以对所有的proposal进行打分,然后一次性预测其回归后的新的检测窗口的位置。但其实也是可以进行迭代的,比如反复地进行打分,然后回归新的窗口,然后对新的窗口再打分再预测,直到收敛为止。然而,作者发现这个迭代并不能提高性能。
实验发现加入bbox回归这个模块可以大幅提高性能,如Fig 3.2所示。
Reference
[1]. Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2014). Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 580-587).
[2]. Uijlings J R R , K. E. A. van de Sande…. Selective Search for Object Recognition[J]. International Journal of Computer Vision, 2013, 104(2):154-171.
[3]. J. Uijlings, K. van de Sande, T. Gevers, and A. Smeulders. Selective search for object recognition. IJCV, 2013.
[4]. https://arxiv.org/abs/1311.2524
[5]. A. Krizhevsky, I. Sutskever, and G. Hinton. ImageNet classification with deep convolutional neural networks. In NIPS, 2012
[6]. K. Simonyan and A. Zisserman. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv preprint, arXiv:1409.1556, 2014.
[7]. P. Felzenszwalb, R. Girshick, D. McAllester, and D. Ramanan. Object detection with discriminatively trained part
based models. TPAMI, 2010.
[8]. P. Felzenszwalb, R. Girshick, D. McAllester, and D. Ramanan. Object detection with discriminatively trained part
based models. TPAMI, 2010
[9]. https://blog.csdn.net/weixin_39306118/article/details/89763646

 浙公网安备 33010602011771号
浙公网安备 33010602011771号