
《临时笔记》 一些计算机视觉的英语术语的纪录
有些计算机视觉相关的英语文献上,有些术语在中文社区中比较少翻译,这里汇总下,作为笔记。
low-relief
典故是意大利语的basso rilievo,意思即是 ‘浅浮雕’ 之意,这里的relief有深度的意思,不过这个深度似乎指的是物体本身凸出的,或者凹陷的意思,是物体本身的属性,而不是我们理解的那种物体A离物体B之间的深度。此属于出现在了[2]中的8.2节,原文是:
We start in this section with the case of scenes whose relief is small compared with their overall depth relative to the cameras observing them, so perspective projection can be approximated by the simpler weak-perspective model of the imaging process.
这里指的relief正是要理解成为物体的属性。见[3]中的讨论,关于什么时候需要假设物体是low-belief的情况。


homography matrix
homography我们看到这个词有homo-开头,就能猜到有“相似,相同”的意思,实际上,从词根而言,homography表示的是similar drawinig/projection的意思,也就是说是相似的图片。但是并不是简单的相似,homography翻译成中文是单应性, 表示的是 在不同视角下,对于同一个平面的表达,如图Fig 2所示,对于同一个平面上的点,在不同视角下的摄像机得到了图像image1和image2,对于这两个视角下的图,其对应的和平面上的点对应的点分别是。通过单应性矩阵,我们可以实现两个视角中的点的转换,如(注意,我们用的都是齐次坐标系):
其中单应性矩阵。
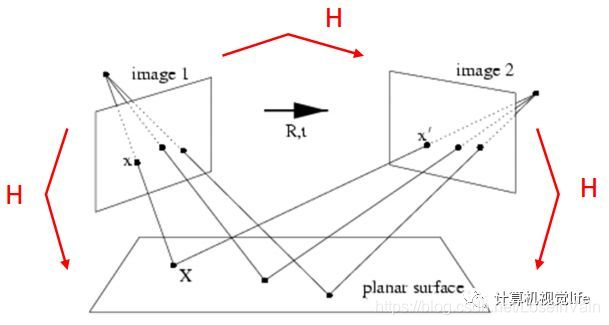
通过单应性矩阵,我们能实现视角之间的转换。
Update 2019.12.3
以上的解释不够准确,在[4]中,作者Hartley给了homography的一个很好地定义(当然,这个定义和我之前说的并不矛盾,只是我的偏向于应用,作者给的偏向于原始定义)。
单应性(homography),也被称之为投影变换(projective transformation),或者共线性(collineation)或者投影性(projectivity),这些术语都是同义的。
A projectivity is alse called a collineation(a helpful name), a projective transformation or a homography: the terms are synonymous.
至于共线性,这是单应性的最直接的体现,定义如下
对于投影空间1,其中有一个映射从自身映射到自身(),当且仅当 共线时,使得空间中的三个点也是共线。
定义很容易理解,可从Fig 2中简单看出,其中的所谓的映射也即是单应性矩阵,在变换前后,直线仍然是直线,这个就称之为共线性,也就是单应性,投影性等等。因为单次变换过程中能够保留共线性,那么即便在多次变换中(也就是我上面举得例子),共线性也可以得到保留,因此就能够通过单应性矩阵在不同视角中,对同一个平面上的视点进行变换迁移了。
disparity
disparity也就是视差,指的是两个不同的相机对于同一个3D点的平面投影的位置上的差别,如下图Fig 3所示。公式计算为:

Reference
[1]. https://en.wikipedia.org/wiki/Relief
[2]. Forsyth, David A, Ponce, Jean. Computer Vision A Modern Approach second edition[M]// Computer Vision: A Modern Approach. 2017.
[3]. https://blog.csdn.net/LoseInVain/article/details/102869987
[4]. Hartley R, Zisserman A. Multiple view geometry in computer vision[M]. Cambridge university press, 2003. Page 32 Definition 2.9
[5]. https://blog.csdn.net/LoseInVain/article/details/102756630
简单理解成用齐次坐标表示的欧式空间即可,准确来说是定义了理想点的欧式空间,见[5] ↩︎

 浙公网安备 33010602011771号
浙公网安备 33010602011771号