立体视觉中的对极几何——如何更好更快地寻找对应点
2019.10.21 FesianXu
前言
在立体视觉中,我们通过多个摄像机的相互配合,可以获得关于现实生活中物体的一些3D信息,通过这些信息,我们可以对这个物体进行重建,建模等等。而在立体视觉中,对极几何有着非常重要的作用,在本文中,笔者将讨论下立体视觉中的对极几何,如何用对极几何去进行更好更快地寻找不同视图中的对应点。如有谬误,请联系指正。转载请注明出处。
∇ 联系方式:
e-mail: FesianXu@gmail.com
QQ: 973926198
github: https://github.com/FesianXu
什么是立体视觉
立体视觉(Stereo Vision)是什么呢?我们可以这样理解:
立体视觉(StereoVision)=寻找相关性(Correspondences)+重建(Reconstruction)
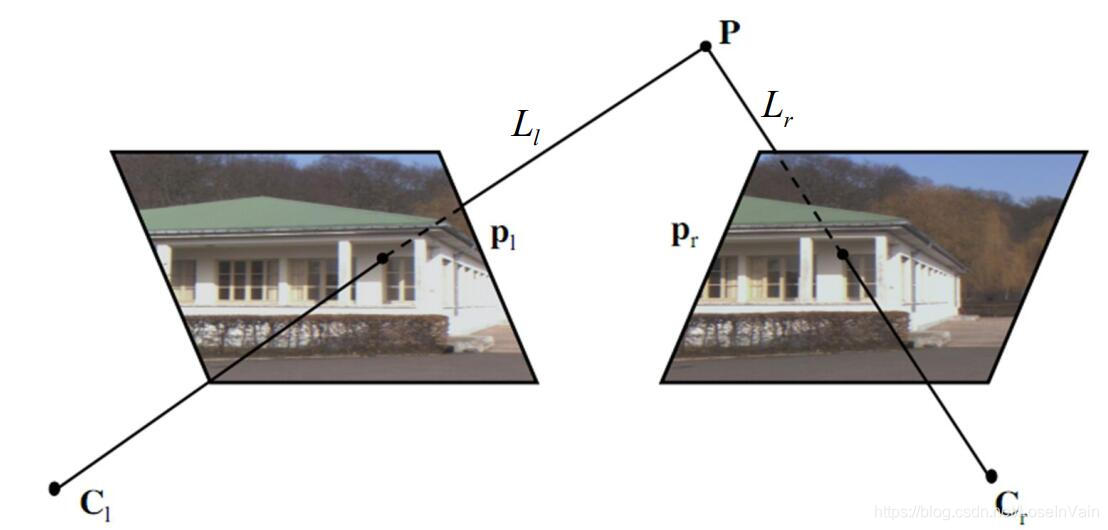
- Correspondences: 给定一张图片中的像素Pl点,寻找其在另一张图片中的对应点Pr。
- Reconstruction: 给定一组对应点对(Pl,Pr),计算其在空间中对应点P的3D坐标。
![在这里插入图片描述]()
Fig 1.1 立体视觉的寻找对应点和重建。
那么,在本文中,其实我们要讨论的内容就属于如何去更好更快地寻找对应点。抱着这个问题,我们正式地开始讨论对极几何吧。
对极几何
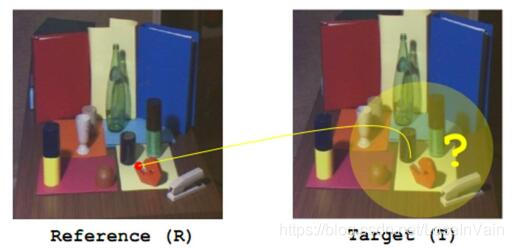
假设我们现在有两张从不同视角拍摄的,关于同一个物体的图片,如Fig 2.1所示,最为朴素的想法就是从一个2D区域中去寻找对应点,这样显然我们的计算复杂度很高,而且还不一定精准,那么我们有没有能够改善这个算法的方案呢?我们能不能对对应点的可能搜索范围进一步缩小呢?答案是可以的。
![在这里插入图片描述]()
Fig 2.1 难道我们要从一个2D区域中去寻找对应点?
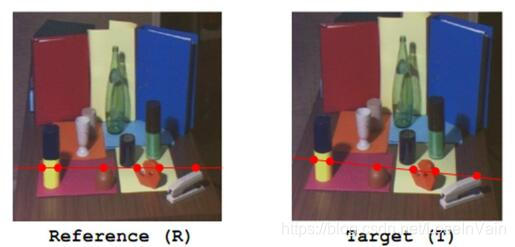
通过对极几何的约束,我们可以把搜索空间限制在一个直线上,我们将这个直线称之为对极线,显然,这样不仅提供了搜索的效率,还提高了搜索的精确度。如Fig 2.2所示。
![在这里插入图片描述]()
Fig 2.2 通过对极几何的约束,我们将搜索空间限制在了对极线上。
这个对极几何那么神奇,那到底是什么原理呢?且听笔者慢慢道来。
对极约束
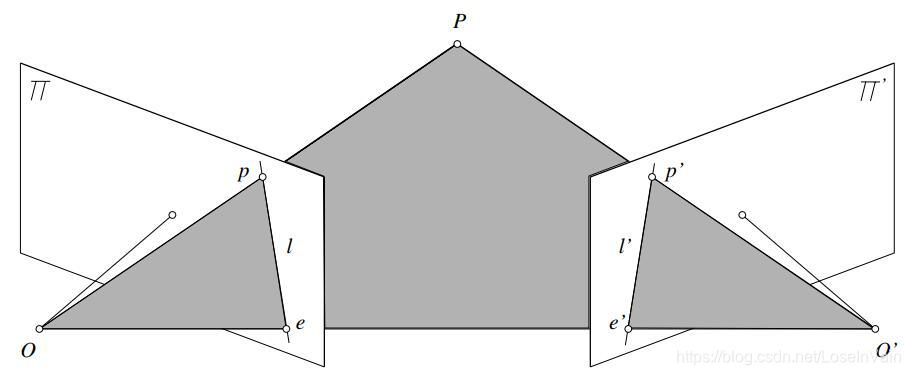
为了简单分析考虑,我们现在只是假设两台摄像机的情况,假设我们已经对摄像机进行了内外参数的标定[2],也就是说,我们已经知道了摄像机的朝向以及彼此之间的距离,相对位置关系等,同时也知道了内参数,也就是焦距等等。那么我们假设现在这两台摄像机同时对某个现实物体点P进行成像,我们有几何关系示意图Fig 2.3。
![在这里插入图片描述]()
Fig 2.3 对极几何约束,其中P点是实体3D点,O和O'是焦点
在Fig 2.3中,其中的P=(x,y,z)是实体3D点,而O和O′是两个摄像机的焦点(对于焦点,读者不妨看成是一个观察者的视角,也就是你可以想象成你在O和O′点观察P点。),而成像平面∏和∏′就是我们的成像面,其中面上的p和p′是实体点P的成像对应点,我们需要找的对应关系,其实就是(p,p′)这样的点对。
对于这两个不同的相机坐标系,我们对于这两个成像点有着不同的坐标系表达,让我们分别以各自的焦点为原点,表达这两个点,有:
p=⎣⎡p1p2f⎦⎤和p′=⎣⎡p1′p2′f′⎦⎤(2.1)
对于Fig 2.3中的其他几何元素,我们分别给予术语,以方便称呼:
- 点e和点e′称之为极点(epipole)
- 线l和l′称之为对极线(epipolar line),其中l是点p′的对极线,l′是点p的对极线。
- 焦点之间的连线OO′称之为基线(Baseline)
- 平面POO′称之为对极面(epipolar plane)。
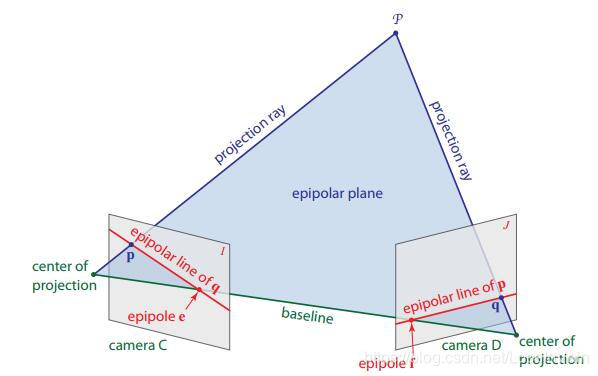
具体的元素位置,我们还能参考图Fig 2.4中的英语标注。
![在这里插入图片描述]()
Fig 2.4 对极几何的一些术语。
那么由图Fig 2.3我们其实很容易发现,所谓的对极约束,指的就是,成像平面∏上的点p,其在∏′的对应点p′必然在其对极线l′上,这个关系可以由三者共面很容易看出来,其证明可参考[3]。也就是说,对于点p,如果我们要搜索其在另一个成像平面上的对应点,无需在整个平面上搜索,只需要在对极线上寻找即可了。如图Fig 2.5所示,我们发现这个几何关系其实是很直观的。
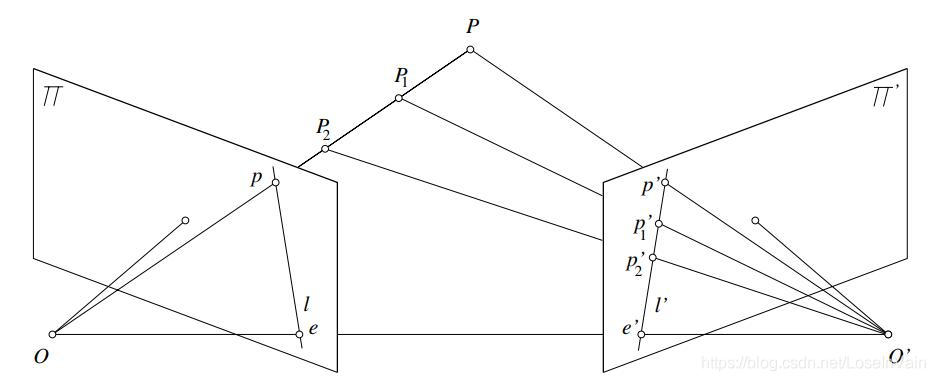
![在这里插入图片描述]()
Fig 2.5 一系列实体点以及其在两个摄像机成像平面上的成像点。
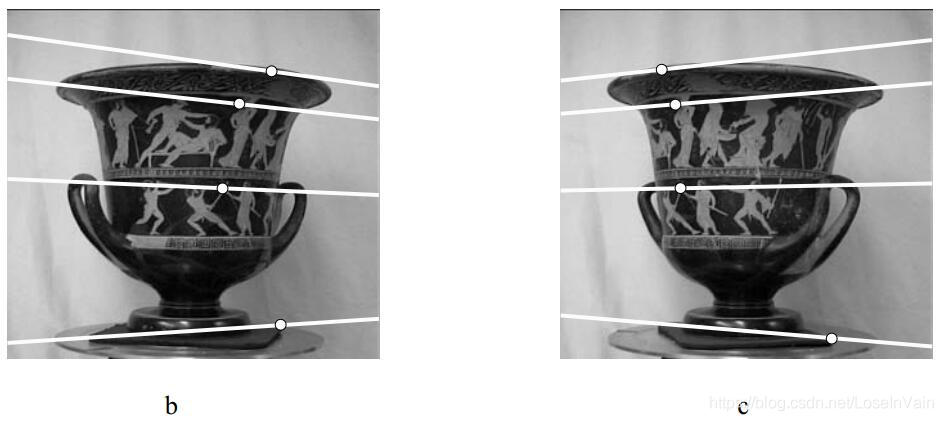
再如图Fig 2.6所示,这是个实际图像的例子,我们发现我们刚才在几何上的结论在实际中是成立的。
![在这里插入图片描述]()
Fig 2.6 b和c上的对极线以及其对应点的位置。
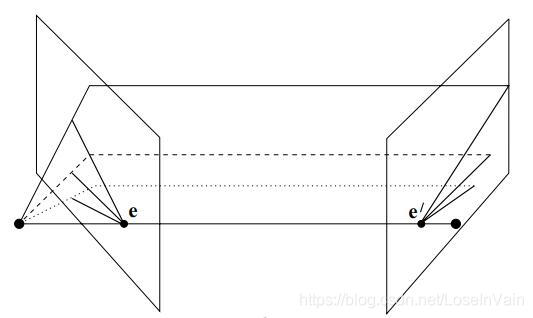
同时,我们要注意到,我们的基线和成像平面的位置是不会改变的(假设不改变摄像机的相对位置的话),那么显然,不管实体点P的位置在哪里,所有的对极线都是会经过极点的,如图Fig 2.7所示,其中虚线表示不同的对极面,不管对极面是哪个,都是会经过基线的;相对应的,所有的对极线也是会经过极点的。
![在这里插入图片描述]()
Fig 2.7 不同的对极面都会经过基线。
好的,那么我们以上就直觉上讨论了对极约束,那么我们应该怎么用代数的方式去描述这个约束呢?毕竟只有用代数的方式表达,才能进行计算机的编程和实现。为了实现代数化,我们要引入所谓的本征矩阵。我们接下来讨论这个。
本征矩阵
还记得公式(2.1)中,我们曾经对两个对应点p和p′进行了坐标表达吗?假设我们现在知道了每台摄像机的内部参数,并且图像坐标已经归一化[4,5],这里所说的归一化指的是假设存在一个焦距为1的面,如Fig 2.8所示,这里假设焦距为单位长度,是为了后面的分析方便而已,我们将会看到,当考虑实际焦距时,其处理略有不同。进行了归一化之后,我们有
pp′=p^=p^′
其中p^,p^′是图像点的单位坐标向量。
![在这里插入图片描述]()
Fig 2.8 相机系统内的物理视网膜平面(也就是实际的成像平面)和归一化成像平面(也就是焦距为1时的成像平面,是假想出来的平面,为了分析方便)。
OK, 不管怎么样,我们继续我们的讨论。我们发现在Fig 2.3中,Op,O′p′和OO′共面,我们用代数描述就是:
Op⋅[OO′×O′p′]=0(2.2)
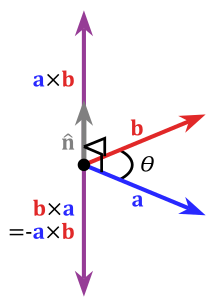
其中,×表示的是向量叉乘,我们知道空间向量叉乘表示求得其在右手坐标系中的正交向量,如图Fig 2.9所示。
![在这里插入图片描述]()
Fig 2.9 叉乘的几何意义。
而式子中的点积为0表示了垂直关系,因此式子(2.2)正确表达了我们的对极约束,我们接下来代入坐标。
考虑在∏′中表示点p,通过坐标的平移和旋转可以容易实现,见:
q′=R(p−t)(2.3)
其中t表示平移向量,R表示旋转矩阵。那么反过来有:
p=RTq′+t=RT(q′+Rt)(2.4)
令R′=RT和s′=−Rt,我们有(2.4)的简化形式:
p=R′(q′−s′)(2.5)
考虑公式(2.2),我们发现:
OpOO′O′p′=p=t=p′(2.6)
注意到,因为对于垂直关系而言,平移与否没有影响,我们最终有式子:
p⋅[t×p′](Rp)⋅[t×p′](Rp)T[t×p′]pTRT[t×p′]pTRT[t]×p′=0=0=0=0=0(2.7)
其中,(2.7)第二行的公式表示在另一个成像平面 ∏′ 表示∏上的坐标,最后一行,我们把叉乘转化成矩阵乘法操作[6]。对于一个t=[t1,t2,t3]T来说,其叉乘乘子的矩阵乘法形式为:
[t]×=⎣⎡0t3−t2−t30t1t2−t10⎦⎤(2.8)
如果用E=RT[t]×,我们有:
(pT)Ep′=0(2.9)
我们把这里的E称之为本征矩阵(Essential matrix)。
我们发现,这里的旋转矩阵R其实是可以通过相机标定进行外参数估计得到的,同样的,t也是如此。假设,我们现在已知了∏上的点p,我们可以令μp=(pT)E∈R3,我们知道这个是个常数向量。最终,公式(2.9)可以写成:
μpp′=0(2.10)
我们发现(2.10)其实就是一个直线方程了,这个直线方程正是p的对极线,我们需要搜索的对应点p′正是在对极线上。
去掉归一化坐标系的限制,引入基础矩阵
我们在本征矩阵那一节考虑的是归一化的坐标系,那么如果在原始的图像坐标系中,我们需要改写成:
pp′=Kp^=K′p^′(2.11)
其中,K,K′是3×3的标定矩阵,p^,p^′是图像点的单位坐标向量。那么我们有:
pTFp′=0(2.12)
其中,矩阵F=K−TEK′−1称之为基础矩阵(Fundamental matrix)。
通常来说,无论是基础矩阵还是本征矩阵都可以通过内外参数的标定来求得,特别地,通过足够多的的图像匹配计算,我们同样可以无须采用标定图像,也可以得到这两个矩阵。
Reference
[1]. 电子科技大学自动化学院 杨路 老师 计算机视觉课程课件。
[2]. https://blog.csdn.net/LoseInVain/article/details/102632940
[3]. Hartley R, Zisserman A. Multiple View Geometry in Computer Vision[J]. Kybernetes, 2008, 30(9/10):1865 - 1872.
[4]. http://answers.opencv.org/question/83807/normalized-camera-image-coordinates/
[5]. http://answers.opencv.org/question/83807/normalized-camera-image-coordinates/
[6]. https://en.wikipedia.org/wiki/Cross_product



 浙公网安备 33010602011771号
浙公网安备 33010602011771号