
开发流程如下所示:
1、通过Vivado创建硬件平台,得到hdf硬件描述文件;
一、创建硬件的过程省略;
二、编译Vivado工程会在sdk文件夹中得到一个hdf文件;
三、在Ubuntu系统的家目录下创建一个petalinux目录,并在petalinux目录下在创建一个hdf目录;
四、将第二部中包含hdf文件的SDK文件夹复制到第三部=步的hdf目录下;
2、运行source <petlinux安装路径>/settings.sh,设置Petalinux运行环境;
一、先搞清楚你的petalinux安装目录,笔者的安装在 /opt/pkg/petalinux/2018.3
二、通过source来运行petalinux安装目录下的settings.sh脚本文件 source /opt/pkg/petalinux/2018.3/settings.sh
三、执行结果如下所示

3、通过petalinux-create -t project创建petalinux工程;
一、在家目录下的petalinux目录中创建petalinux工程
二、进入到petalinux目录,在终端执行输入命令 petalinux-create -t project --template zynq -n WEDU-ZYNQ,创建一个名为WEDU-ZYNQ的petalinux工程,当然名字可以随便取。
4、使用petalinux-config --get-hw-description,将hdf文件导入到petalinux工程当中,并配置petalinux工程;
一、进入到petalinux工程目录,cd WEDU-ZYNQ
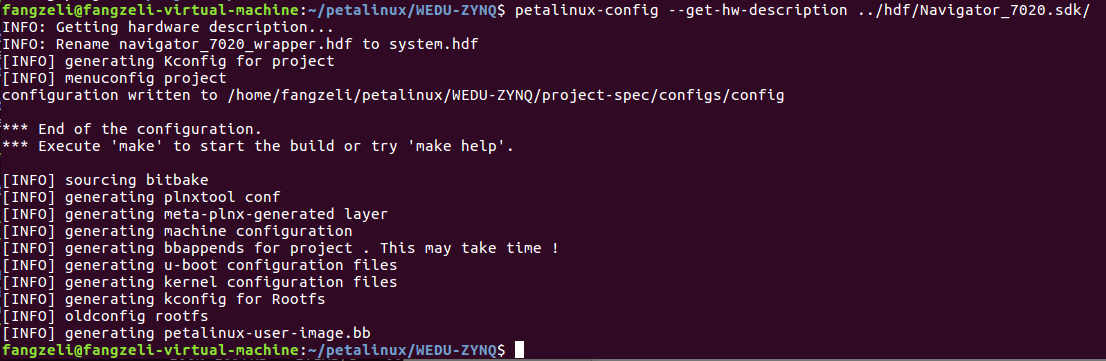
二、首次配置petalinux工程是将hdf硬件描述文件导入到petalinux工程,在终端执行命令:petalinux-config --get-hw -description ..hdf/Navigator_7020.sdk
..hdf/Navigator_7020.sdk就是我们之前复制到Ubuntu系统的文件。
三、hdf文件导入成功之后会自动弹出petalinux工程配置窗口
这里只改了一个串口信息,配置结束如下图所示,整个过程要花好几分钟
5、使用petalinux-config -c kernel配置Linux内核;
一、在终端输入 petalinux-config -c kernel,过一段时间会弹出linux内核的配置界面
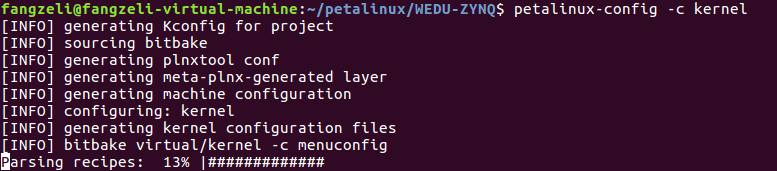
二、petalinux默认使用的内核版本是4.14.0,官方已经做好了基础配置,无特殊需求,就不用修改,保存配置并退出
6、使用petalinux-config - c rootfs配置Linux根文件系统;
一、在终端输入命令 petalinux-config -c rootfs,弹出配置界面
二、默认配置可满足一般使用,保持默认配置即可
7、配置设备树文件
8、使用petalinux-build编译整个工程;
一、在终端输入命令 petalinux-build 编译整个petalinux工程;
二、该命令将生产设备树DTB文件、fsbl文件、U-Boot文件,Linux内核和根文件系统映像,编译完成之后,生成的映像文件位于工程的images目录。
9、使用petalinux-package--boot制作BOOT.BIN启动文件;
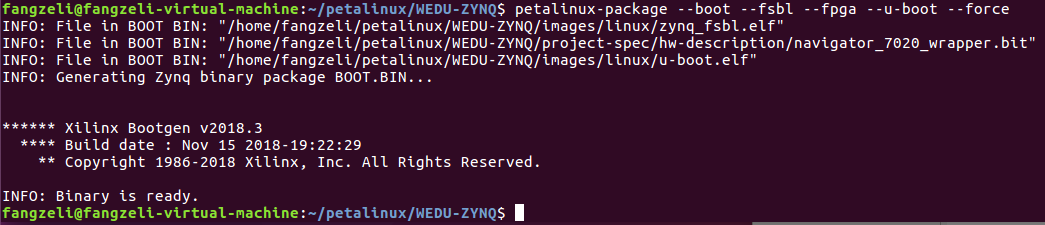
一、petalinux提供petalinux-package命令,将petalinux项目打包为适合部署的格式,其中petalinux-package --boot 命令生成可引导映像,该映像可直接与ZYNQ系列设备一起使用。
二、在终端输入命令 petalinux-package --boot --fsbl --fpga --u-boot --force ,执行结果如下
10、制作SD启动卡,将BOOT.BIN和image.ub以及根文件系统部署到SD卡中;
参考SD卡制作
11、将SD卡插入开发板,并将开发板启动模式设置为从SD卡启动;
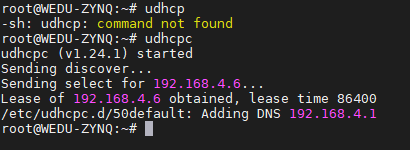
12、开发板连接串口线并上电启动,串口上位机打印启动信息,登陆进入Linux系统
可以使用udhcpc命令自动获取ip,执行结果如下所示

 浙公网安备 33010602011771号
浙公网安备 33010602011771号