软件工程基础 第3次个人作业
一点说明
这篇博客是软件工程基础(罗杰、任建)的第三次课程作业(个人项目作业)
| 项目 | 内容 |
|---|---|
| 这个作业属于哪个课程 | 软件工程基础(罗杰,任建) |
| 这个作业的要求在哪里 | 作业要求的链接 |
| 我在这个课程的目标是 | 提升对软件工程的宏观和微观的全面认识,并加以实践 |
| 作业在哪些方面帮我实现目标 | 亲身实践个人项目开发的完整流程 |
| 我的教学班级 | 006 |
| 我的GitHub项目地址 | https://github.com/SnowOnVolcano/IntersectProject.git |
PSP表格
在开始实现程序之前,在下述 PSP 表格记录下你估计将在程序的各个模块的开发上耗费的时间。(0.5')
在你实现完程序之后,在下述 PSP 表格记录下你在程序的各个模块上实际花费的时间。(0.5')
| PSP2.1 | Personal Software Process Stages | 预估耗时(分钟) | 实际耗时(分钟) |
|---|---|---|---|
| Planning | 计划 | 15 | 20 |
| · Estimate | · 估计这个任务需要多少时间 | 15 | 20 |
| Development | 开发 | 330 | 470 |
| · Analysis | · 需求分析 (包括学习新技术) | 60 | 80 |
| · Design Spec | · 生成设计文档 | 30 | 20 |
| · Design Review | · 设计复审 (和同事审核设计文档) | 0 | 0 |
| · Coding Standard | · 代码规范 (为目前的开发制定合适的规范) | 10 | 10 |
| · Design | · 具体设计 | 40 | 60 |
| · Coding | · 具体编码 | 100 | 120 |
| · Test | · 测试(自我测试,修改代码,提交修改 | 90 | 180 |
| Reporting | 报告 | 75 | 110 |
| · Test Report | · 测试报告 | 45 | 60 |
| · Size Measurement | · 计算工作量 | 10 | 10 |
| · Postmortem & Process Improvement Plan | · 事后总结, 并提出过程改进计划 | 20 | 40 |
| Total | 合计 | 420 | 600 |
基本需求
1. 解题思路
解题思路描述。即刚开始拿到题目后,如何思考,如何找资料的过程。(3')
-
思路一
读完问题的第一思路,是利用高中学到的 一般方程法 进行交点的求解:
\[设直线方程为\ ax+by+c=0,\ 已知直线过两点(x_1,y_1)和(x_2,y_2),则有\\ \begin{cases}ax_1+by_1+c=0\\ax_2+by_2+c=0\end{cases}\implies \begin{cases}a=y_1-y_2\\b=x_2-x_1\\c=x_1y_2-x_2y_1\end{cases}\\ 设两直线分别为\ a_1x+b_1y+c_1=0\ 和\ a_2x+b_2y+c_2=0,联立两直线方程,得\\ \begin{cases}a_1x+b_1y+c_1=0\\a_2x+b_2y+c_2=0\end{cases}\implies \begin{cases}x=\frac{b_1c_2-b_2c_1}{a_1b_2-a_2b_1}\\y=\frac{a_2c_1-a_1c_2}{a_1b_2-a_2b_1}\end{cases}\implies \begin{cases}x=\frac{b_1c_2-b_2c_1}{D}\\y=\frac{a_2c_1-a_1c_2}{D}\end{cases},其中\ D=a_1b_2-a_2b_1 \]这样的解法有几个好处:
- 可以较好地处理特殊情况,比如,可以通过判断
D是否为 0,直接判断两直线是否平行; - 这种方法直接计算出交点的坐标,这样可以设置一个
set用来存放已得到的交点,直接在存入时进行除重,最终结果输出set的大小即可;
当然,其缺点也很明显:
- 计算简单粗暴,对于具有
N条直线的样本,需要进行 \(C_N^2\) 次计算,时间复杂度为 \(O(n^2)\); - 如果简单地使用
set<(x,y)>进行的方式进行存储,则需要进行浮点运算,这既会带来精度的损失,也会加长运行时间。
- 可以较好地处理特殊情况,比如,可以通过判断
-
思路二
如果不采用直接计算的方法,如何得出交点个数呢?我想到的另一个方法是,做减法。
如果任意的两条直线都相交且任意的三条直线不交于同一点,那么对于具有
N条直线的样本,交点的个数为 \(C_N^2\),对一般情况就有,\[总交点数=C_N^2-平行直线对的数目-\sum_{所有的交点}{(同一交点的直线数目-2)} \]但是,仔细想想,这种方法似乎并不比思路简单,因为我没有想到好的算法去计算同一交点的直线数目……
-
思路三
想不到好的算法,我最后只能决定使用直接计算的方法,但是我想其实思路一的方法还可以简单地优化一下细节,减小精度损失,有两个方法,
- 在存放交点时,交点的纵横坐标的分子分母分开存储,这样可以规避浮点运算,从而保证精度;
- 对
set的排序函数进行重载,设置一定的精度范围,这样可以一定程度地减小精度损失,但是无法从根本上避免。
我最终选择了后者,以平衡精度和时间复杂度。
2. 实现过程
设计实现过程。设计包括代码如何组织,比如会有几个类,几个函数,他们之间关系如何,关键函数是否需要画出流程图?单元测试是怎么设计的?(4')
-
结构设计(2个结构体)
Point:表示点 \((x,y)\),其中Point.x、Point.y分别表示点的纵横坐标;Line:表示直线 \(ax+by+c=0\),其中Line.a、Line.b、Line.c分别对应直线的三个参数;
-
函数实现(2+1+1个函数)
-
Point和Line的构造函数,计算两直线交点的函数calLineLineIst(...),主函数; -
各函数关系如下,
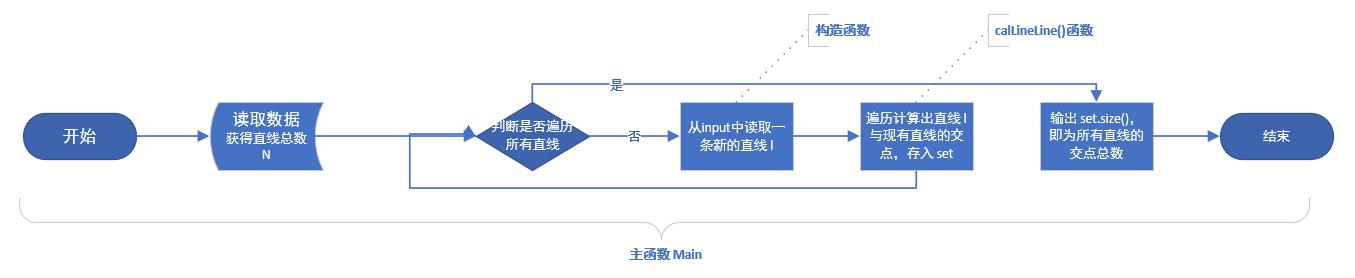
-
-
单元测试
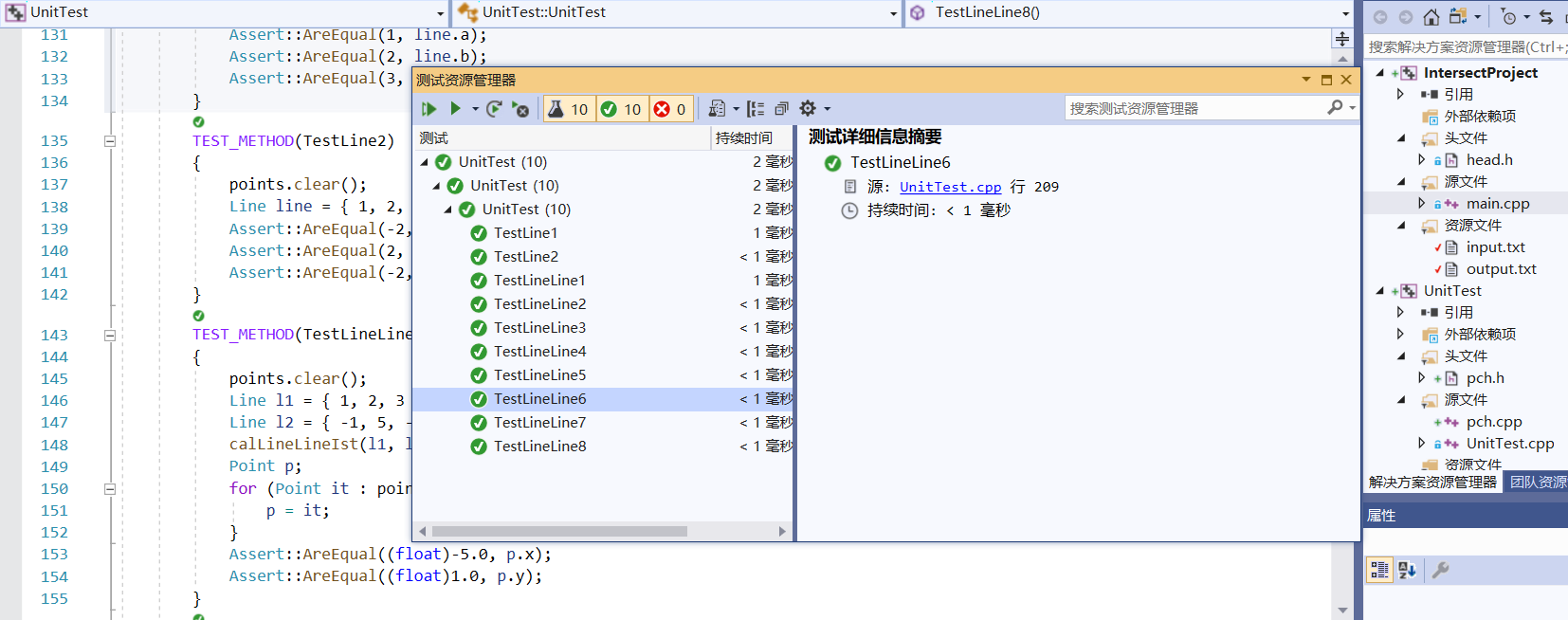
我主要进行了三个方面的单元测试:
- 构造函数是否能正确初始化:包括参数的传递和计算;
- 交点计算函数是否能覆盖所有情况:包括多线一点、平行的情况,以及直线与坐标轴平行等情况;
- 交点集合的精确度是否能保证:重点测试了以下两种情况,1)在交点相差较小的情况下,是否能够区分开不同的交点;2)在交点的小数点位数较多时,是否能保证交点不重复。
以下是我的一些单元测试的测试点的图形示意:

3. 性能改进
记录在改进程序性能上所花费的时间,描述你改进的思路,并展示一张性能分析图(由 VS 2019 的性能分析工具自动生成),并展示你程序中消耗最大的函数。(3')
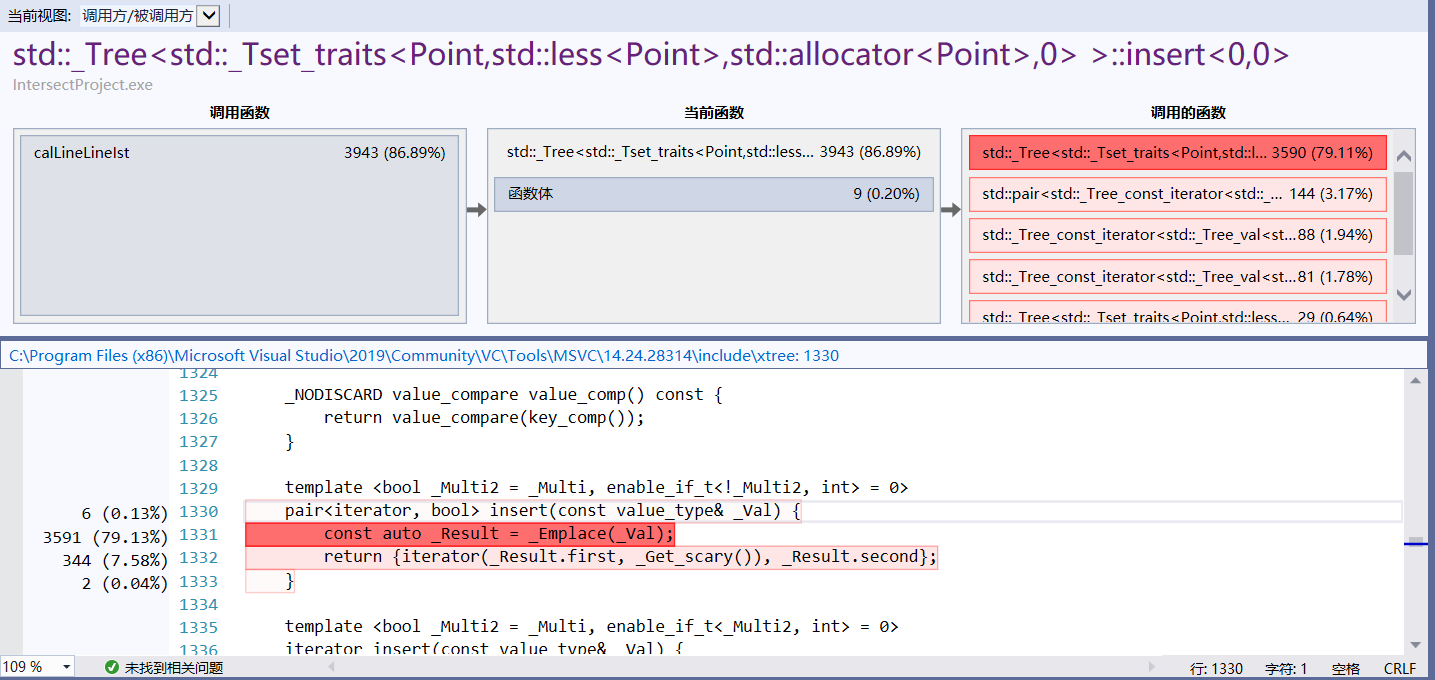
- 在改进之前,我进行了一次程序性能的测试,我发现,最费时的操作是 set 的插入时,遍历红黑树的过程。反而计算交点的函数没有花费太多的时间。
- 但是,在尝试了非红黑树的集合之后,我发现有时候正确性得不到保证,所以我最后还是选择了保持原有的 set。
- 其他的优化都是小修小补了,比如,
- 优化了代码结构,将点和直线的初始化函数放入了结构体内;
- 除了最后的计算,中间过程使用整型,而非浮点型
- 优化后的图如下
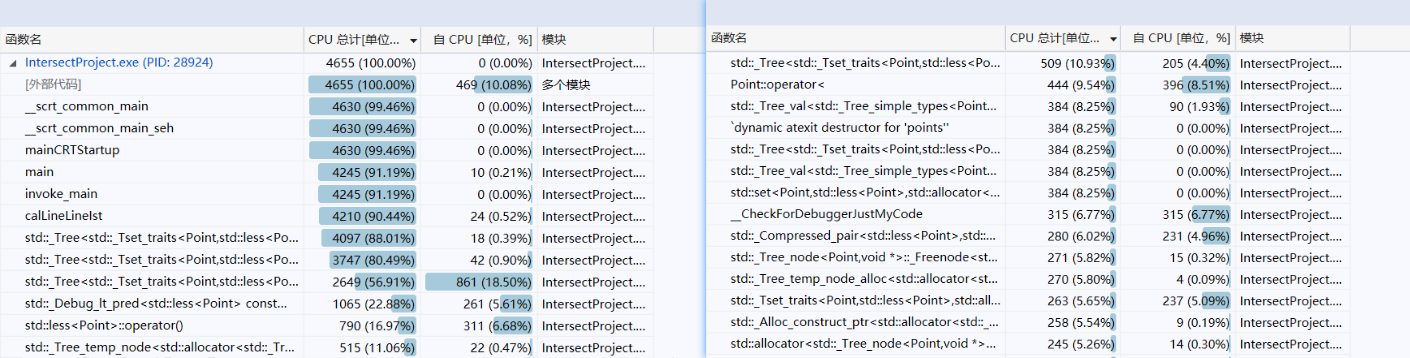
- 程序中消耗最大的函数如下
4. 代码说明
代码说明。展示出项目关键代码,并解释思路与注释说明。(3')
-
计算直线与直线交点(思路请见代码注释)
// calculate the intersections of two lines static void calLineLineIst(Line& line1, Line& line2) { int D; D = line1.a * line2.b - line2.a * line1.b; switch (D) { case 0: // parallel break; default: // line1: a1*x+b1*x+c1=0, line2: a2*x+b2*x+c2=0 // ==> x=(b1*c2-b2*c1)/(a1*b2-a2*b1), // y=(a2*c1-a1*c2)/(a1*b2-a2*b1) // let D=a1*b2-a2*b1 // ==> x=(b1*c2-b2*c1)/D, y=(a2*c1-a1*c2)/D Point point = { (line1.b * line2.c - line2.b * line1.c) / (float)D, (line2.a * line1.c - line1.a * line2.c) / (float)D }; points.insert(point); break; } } -
集合的排序和精度的确定
bool operator == (const Point& other) const { return fabs(x - other.x) < 0.00000001 && fabs(y - other.y) < 0.00000001; } bool operator < (const Point& other) const { if (x != other.x) { return x < other.x; } else { return y < other.y; } }
附加题
1. 解题思路
2. 代码说明
-
计算直线与圆交点(思路请见代码注释)
// calculate the intersections of line and Circle static void calLineCircleIst(Line& line, Circle& circle) { int intercept; // intercept=r^2-d^2=r^2-(ax+by+c)^2/(a^2+b^2) intercept = (int)(pow(circle.r, 2) - pow(line.a * circle.x + line.b * circle.y + line.c, 2) / (pow(line.a, 2) + pow(line.b, 2))); // not intersect if (intercept < 0) { return; } // tLine is perpendicular to line Line tLine = { line.b, -line.a, line.a * circle.y - line.b * circle.x }; int D; D = tLine.a * line.b - line.a * tLine.b; // tPoint is the intersection of line and tLine Point tPoint = { (tLine.b * line.c - line.b * tLine.c) / (float)D, (line.a * tLine.c - tLine.a* + line.c) / (float)D }; switch (intercept) { case 0: // line is tangent to circle points.insert(tPoint); break; default:// line passes through circle float vecX; float vecY; float offset; // (vecX, vecY) is a unit vector vecX = (float)(line.b / sqrt(pow(line.a, 2) + pow(line.b, 2))); vecY = (float)(-line.a / sqrt(pow(line.a, 2) + pow(line.b, 2))); // Offset is half of the intercept offset = (float)sqrt(intercept / (pow(line.a, 2) + pow(line.b, 2))); // intersection = tPoint +/- vec*offset Point ist1 = { tPoint.x + vecX * offset, tPoint.y + vecY * offset }; Point ist2 = { tPoint.x - vecX * offset, tPoint.y - vecY * offset }; points.insert(ist1); points.insert(ist2); break; } } -
计算圆与圆交点(思路请见代码注释)
// calculate intersections of two circles static void calCircleCircleIst(Circle& circle1, Circle& circle2) { int radiusSum; int radiusDiff; int centerDis; radiusSum = (int)pow(circle1.r + circle2.r, 2); radiusDiff = (int)pow(circle1.r - circle2.r, 2); centerDis = (int)(pow(circle1.x - circle2.x, 2) + pow(circle1.y - circle2.y, 2)); // not intersect if (centerDis > radiusSum || centerDis < radiusDiff) { return; } // line passes both two intersections of circles Line line = { circle1.d - circle2.d, circle1.e - circle2.e, circle1.f - circle2.f }; // the intersections of two circles are also the intersections of line and circle calLineCircleIst(line, circle1); }
截图 - 测试与度量
1. 单元测试覆盖率
2. Code Quality Analysis 警告消除

 浙公网安备 33010602011771号
浙公网安备 33010602011771号