Python+OpenCV图像处理(十二)—— 图像梯度
简介:图像梯度可以把图像看成二维离散函数,图像梯度其实就是这个二维离散函数的求导。
Sobel算子是普通一阶差分,是基于寻找梯度强度。拉普拉斯算子(二阶差分)是基于过零点检测。通过计算梯度,设置阀值,得到边缘图像。
以下各种算子的原理可参考:https://blog.csdn.net/poem_qianmo/article/details/25560901
一、Sobel算子
代码如下:
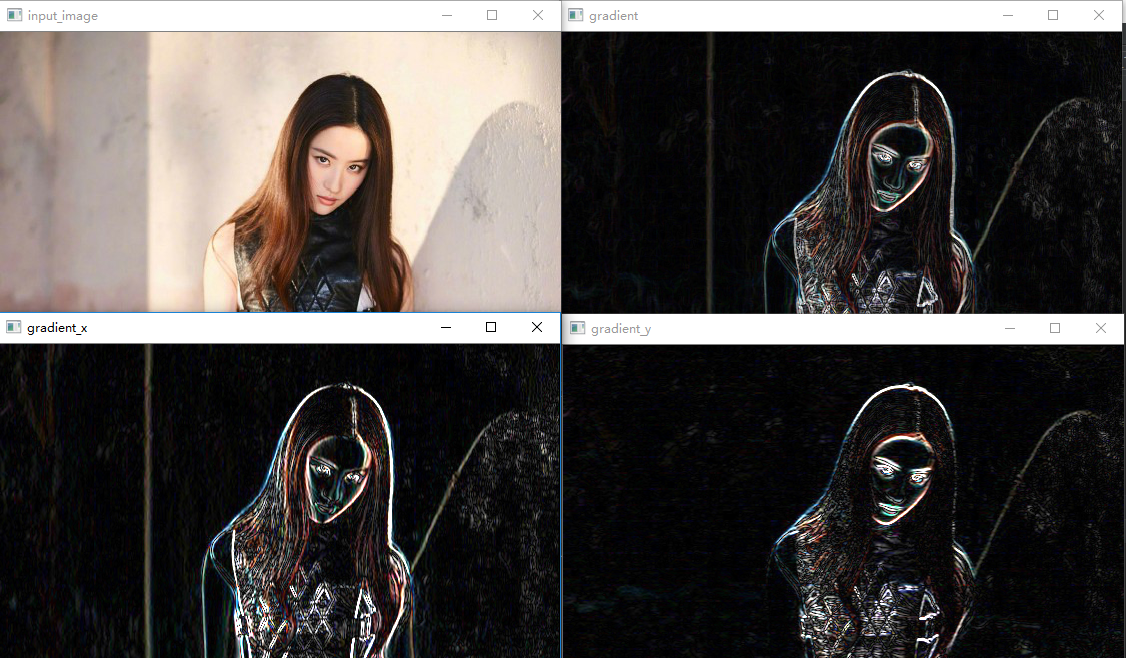
import cv2 as cv #Sobel算子 def sobel_demo(image): grad_x = cv.Sobel(image, cv.CV_32F, 1, 0) #对x求一阶导 grad_y = cv.Sobel(image, cv.CV_32F, 0, 1) #对y求一阶导 gradx = cv.convertScaleAbs(grad_x) #用convertScaleAbs()函数将其转回原来的uint8形式 grady = cv.convertScaleAbs(grad_y) cv.imshow("gradient_x", gradx) #x方向上的梯度 cv.imshow("gradient_y", grady) #y方向上的梯度 gradxy = cv.addWeighted(gradx, 0.5, grady, 0.5, 0) #图片融合 cv.imshow("gradient", gradxy) src = cv.imread('E:/imageload/liu.jpg') cv.namedWindow('input_image', cv.WINDOW_NORMAL) #设置为WINDOW_NORMAL可以任意缩放 cv.imshow('input_image', src) sobel_demo(src) cv.waitKey(0) cv.destroyAllWindows()
运行结果:
注意:
1.Sobel算子用来计算图像灰度函数的近似梯度。Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
2.Sobel具有平滑和微分的功效。即:Sobel算子先将图像横向或纵向平滑,然后再纵向或横向差分,得到的结果是平滑后的差分结果。
OpenCV的Sobel函数原型为:Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]]) -> dst
src参数表示输入需要处理的图像。
ddepth参数表示输出图像深度,针对不同的输入图像,输出目标图像有不同的深度。
具体组合如下:
src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F (一般源图像都为CV_8U,为了避免溢出,一般ddepth参数选择CV_32F)
src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_64F, 取ddepth = -1/CV_64F
注:ddepth =-1时,代表输出图像与输入图像相同的深度。
dx参数表示x方向上的差分阶数,1或0 。
dy参数表示y 方向上的差分阶数,1或0 。
dst参数表示输出与src相同大小和相同通道数的图像。
ksize参数表示Sobel算子的大小,必须为1、3、5、7。
scale参数表示缩放导数的比例常数,默认情况下没有伸缩系数。
delta参数表示一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中。
borderType表示判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
参考:
https://blog.csdn.net/streamchuanxi/article/details/51542141
https://blog.csdn.net/sunny2038/article/details/9170013
Sobel算子原理:https://www.cnblogs.com/lancidie/archive/2011/07/17/2108885.html
2.OpenCV的convertScaleAbs函数使用线性变换转换输入数组元素成8位无符号整型。函数原型:convertScaleAbs(src[, dst[, alpha[, beta]]]) -> dst
3.OpenCV的addWeighted函数是计算两个数组的加权和。函数原型:addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]]) -> dst
src1参数表示需要加权的第一个输入数组。
alpha参数表示第一个数组的权重。
src2参数表示第二个输入数组,它和第一个数组拥有相同的尺寸和通道数。
beta参数表示第二个数组的权重。
gamma参数表示一个加到权重总和上的标量值。
dst参数表示输出的数组,它和输入的两个数组拥有相同的尺寸和通道数。
dtype参数表示输出数组的可选深度。当两个输入数组具有相同的深度时,这个参数设置为-1(默认值),即等同于src1.depth()。
二、Scharr算子
代码如下:
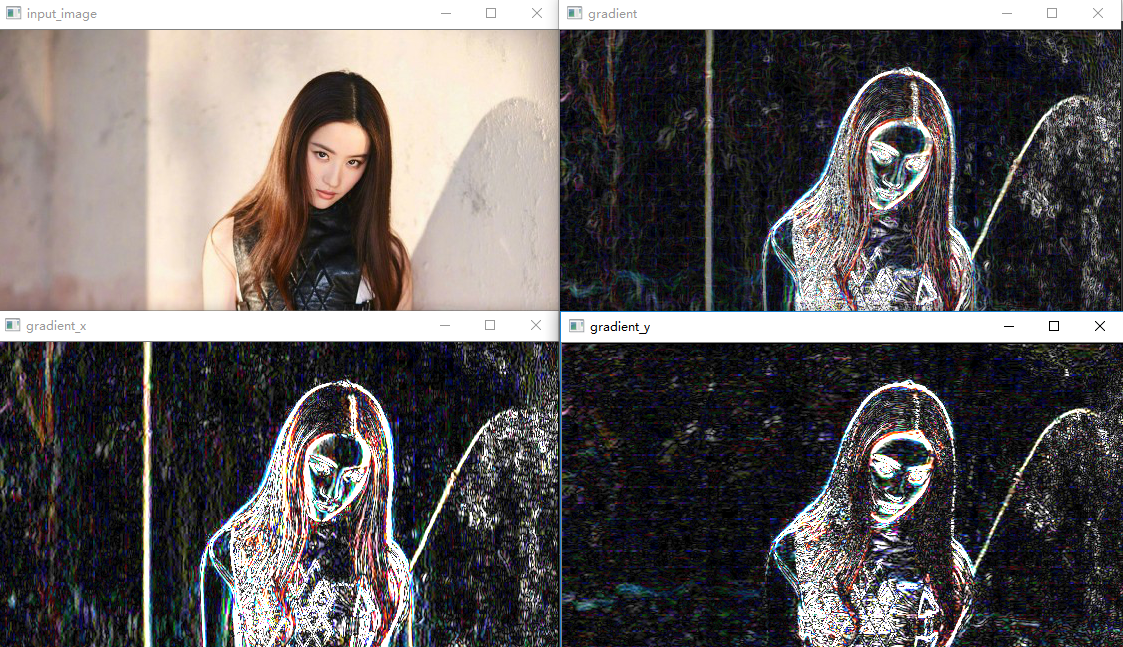
import cv2 as cv #Scharr算子(Sobel算子的增强版,效果更突出) def Scharr_demo(image): grad_x = cv.Scharr(image, cv.CV_32F, 1, 0) #对x求一阶导 grad_y = cv.Scharr(image, cv.CV_32F, 0, 1) #对y求一阶导 gradx = cv.convertScaleAbs(grad_x) #用convertScaleAbs()函数将其转回原来的uint8形式 grady = cv.convertScaleAbs(grad_y) cv.imshow("gradient_x", gradx) #x方向上的梯度 cv.imshow("gradient_y", grady) #y方向上的梯度 gradxy = cv.addWeighted(gradx, 0.5, grady, 0.5, 0) cv.imshow("gradient", gradxy) src = cv.imread('E:/imageload/liu.jpg') cv.namedWindow('input_image', cv.WINDOW_NORMAL) #设置为WINDOW_NORMAL可以任意缩放 cv.imshow('input_image', src) Scharr_demo(src) cv.waitKey(0) cv.destroyAllWindows()
运行结果:
注意:
Scharr算子也是计算x或y方向上的图像差分。OpenCV的Scharr函数原型为:Scharr(src, ddepth, dx, dy[, dst[, scale[, delta[, borderType]]]]) -> dst
参数和Sobel算子的几乎差不多,意思也一样,只是没有ksize大小。
三、拉普拉斯算子
代码如下:
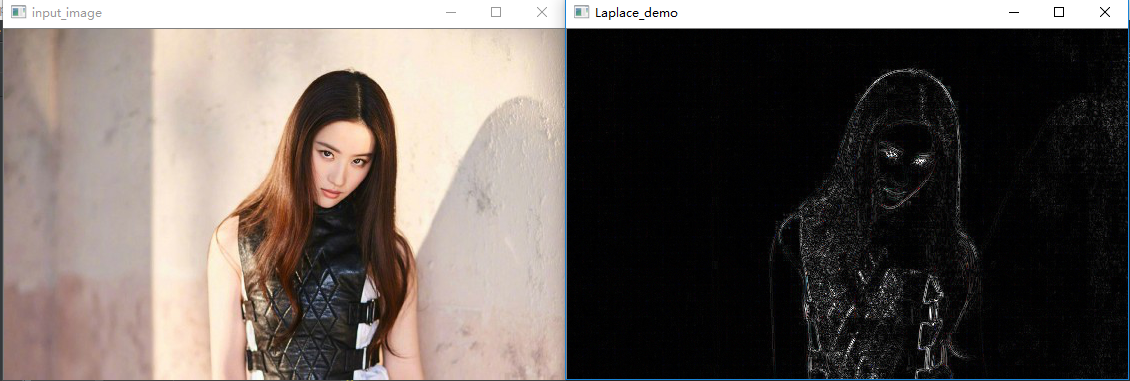
import cv2 as cv #拉普拉斯算子 def Laplace_demo(image): dst = cv.Laplacian(image, cv.CV_32F) lpls = cv.convertScaleAbs(dst) cv.imshow("Laplace_demo", lpls) src = cv.imread('E:/imageload/liu.jpg') cv.namedWindow('input_image', cv.WINDOW_NORMAL) #设置为WINDOW_NORMAL可以任意缩放 cv.imshow('input_image', src) Laplace_demo(src) cv.waitKey(0) cv.destroyAllWindows()
运行结果:
注意:
1.拉普拉斯算子(Laplace Operator)是n维欧几里德空间中的一个二阶微分算子,定义为梯度(▽f)的散度(▽·f)。
2.OpenCV的Laplacian函数原型为:Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]]) -> dst
src参数表示输入需要处理的图像。
ddepth参数表示输出图像深度,针对不同的输入图像,输出目标图像有不同的深度。
具体组合如下:
src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F (一般源图像都为CV_8U,为了避免溢出,一般ddepth参数选择CV_32F)
src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_64F, 取ddepth = -1/CV_64F
注:ddepth =-1时,代表输出图像与输入图像相同的深度。
dst参数表示输出与src相同大小和相同通道数的图像。
ksize参数表示用于计算二阶导数滤波器的孔径大小,大小必须是正数和奇数。
scale参数表示计算拉普拉斯算子值的比例因子,默认情况下没有伸缩系数。
delta参数表示一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中。
borderType表示判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
补:
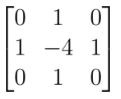
这里ksize参数默认值为1,此时Laplacian()函数采用以下3x3的孔径:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号