XGBoost
XGBoost
参考资料:
- https://blog.csdn.net/v_JULY_v/article/details/81410574
- https://dl.acm.org/doi/abs/10.1145/2939672.2939785
- https://blog.csdn.net/anshuai_aw1/article/details/85093106
- https://www.hrwhisper.me/machine-learning-xgboost/
目标函数
根据泰勒展开: \(f(x+\Delta x) \simeq f(x) + f'(x)\Delta x + \frac{1}{2} f''(x)\Delta x^2\)
其中
- 泰勒展开中的 \(x\) 对应目标函数中的 \(\hat{y}^{(t-1)}\)
- \(\Delta x\) 对应 新增加的目标函数 \(f_t(x_i)\)
- \(f\) 对 \(x\) 求导,就是 \(Obj^{(t)}\) 对 \(\hat{y}^{(t-1)}\) 求导。
所以目标函数除去常数项,得到
正则项
设 \(T\) 是叶子节点的个数, \(q(x)\) 表示样本 \(x\) 在某个叶子节点上, \(w_q(x)\) 是该节点的打分,即该样本的模型预测值。
通过对 \(w\) 进行 \(L_2\) 正则化,相当于针对每个叶结点的得分增加 \(L_2\) 平滑,目的是为了避免过拟合。
其中 \(I_j\) 被定义为每个叶节点 \(j\) 上面样本下标的集合 \(I_j=\{i|q(x_i)=j\}\) , \(g\) 是一阶导数, \(h\) 是二阶导数。这一步是由于xgboost目标函数第二部分加了两个正则项,一个是叶子节点个数(\(T\)),一个是叶子节点的分数(\(w\))。
定义
简化公式为
对 \(w_j\) 求导等于0,得到当 \(w_j^*=-\frac{G_j}{H_j+\lambda}\) 。带入 \(Obj\) ,得到
\(Obj\) 代表了当我们指定一个树的结构的时候,我们在目标上面最多减少多少。我们可以把它叫做结构分数(structure score)
分裂节点
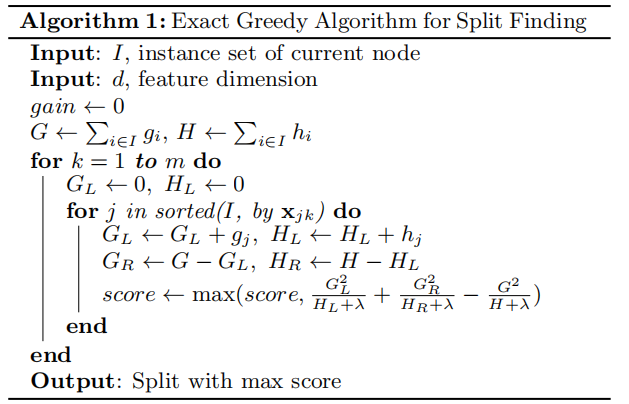
每一节点都遍历所有的特征,比如年龄、性别等等,然后对于某个特征,先按照该特征里的值进行排序,然后线性扫描该特征进而确定最好的分割点,最后对所有特征进行分割后,我们选择所谓的增益Gain最高的那个特征,而Gain如何计算呢?
\(Obj\) 中的 \(\frac{G_j^2}{H_j + \lambda}\) 表示叶子结点 \(j\) 对当前模型损失度的贡献,由此得到
上式表示 左子树的分数 + 右子树的分数 - 不分割我们可以拿到的分数。 \(\gamma\) 表示加入新叶子节点引入的复杂度代价。当引入的分割带来的增益小于一个阀值 \(\gamma\) 的时候,则忽略这个分割。
对于所有的特征x,我们只要做一遍从左到右的扫描就可以枚举出所有分割的梯度和GL和GR。然后用计算Gain的公式计算每个分割方案的分数就可以了。具体做法如下图所示。
树节点划分算法 - Approximate Algorithm
然而,当落实到具体工程上,数据不能完全装入内存时,就不可能有效地做到这一点。同样的问题也出现在分布式环境中。为了支持这两者情况,一种近似算法如下所示。
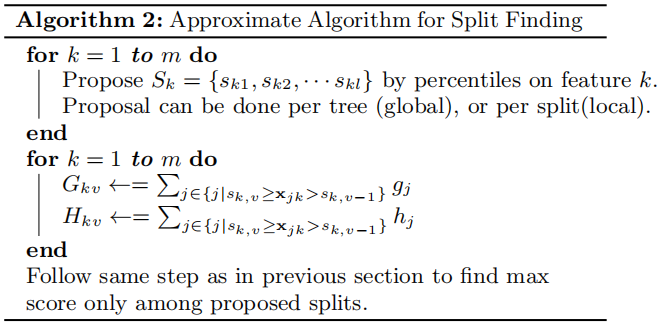
该算法首先根据特征分布的百分位数提出候选分裂点。然后,算法将连续特征映射到由这些候选点分割的桶中,汇总统计信息,并根据汇总的统计信息在提议中找到最佳解。
该算法有两个变种,取决于何时提出proposal。全局方法在树构建的初始阶段提出所有候选分裂,并在所有级别上使用相同的proposal进行分裂查找。局部方法在每次分裂后重新提出建议。全局方法所需的proposal步骤比局部方法少。然而,通常全局proposal需要更多的候选点,因为在每次分裂后候选点没有经过细化。局部proposal在分裂后对候选点进行细化,可能更适用于深层树。
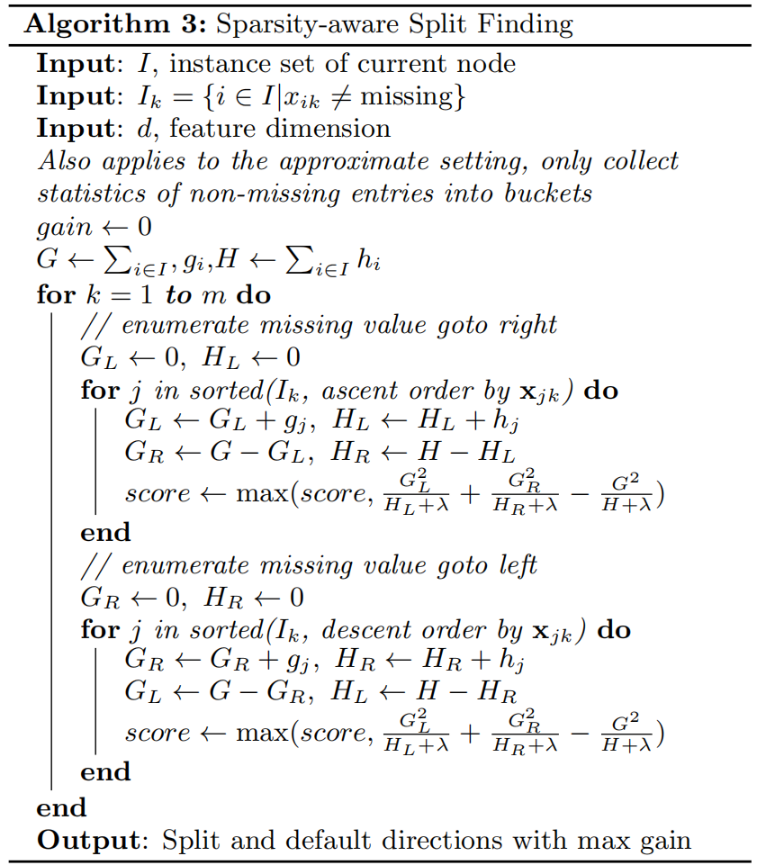
稀疏值处理
输入 \(x\) 的稀疏性,可能由这些原因造成:1)数据中存在缺失值;2)统计数据中频繁出现零值;以及,3)特征工程中的人为特征编码等。当 \(x\) 中的值缺失时,XGBoost 将实例分类到默认方向。如算法 3 所示。关键改进是只访问非缺失条目 \(I_k\)。
分块并行
在建树的过程中,最耗时是找最优的切分点,而这个过程中,最耗时的部分是将数据排序。为了减少排序的时间,提出Block结构存储数据。
- Block中的数据以稀疏格式CSC进行存储
- Block中的特征进行排序(不对缺失值排序)
- Block 中特征还需存储指向样本的索引,这样才能根据特征的值来取梯度。
- 一个Block中存储一个或多个特征的值
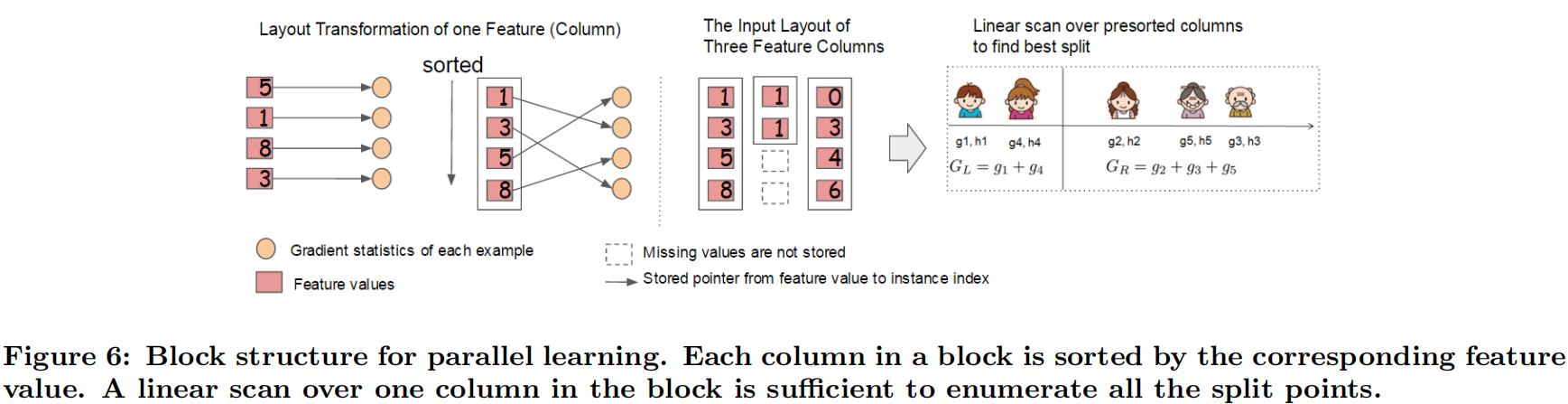
只需在建树前排序一次,后面节点分裂时可以直接根据索引得到梯度信息。
- 在Exact greedy算法中,将整个数据集存放在一个Block中。这样,复杂度从原来的 \(O(Kd\|x\|_0\log n)\) 降为 \(O(Kd\|x\|_0+\|x\|_0\log n)\) ,其中 \(d\) 为树的最大深度, \(K\) 为树的数量, \(\|x\|_0\) 为训练集中非缺失值的个数。这样,Exact greedy算法就省去了每一步中的排序开销。
- 在近似算法中,使用多个Block,每个Block对应原来数据的子集。不同的Block可以在不同的机器上计算。该方法对Local策略尤其有效,因为Local策略每次分支都重新生成候选切分点。复杂度从原来的 \(O(Kd\|x\|_0\log q)\) 降低为 \(O(Kd\|x\|_0+\|x\|_0\log B)\) 。其中 \(q\) 是候选分裂点的数量, \(B\) 为每个Block中最大的行数。 \(q\) 一般取值在32到100之间,因此可以考虑省去的 \(\log q\) 。
Block结构还有其它好处,数据按列存储,可以同时访问所有的列,很容易实现并行的寻找分裂点算法。此外也可以方便实现之后要讲的out-of score计算。
缺点是空间消耗大了一倍。
关于时间复杂度
如果我们不使用block结构时,即采用原始的稀疏精确算法时。为了在每一个节点node找到最优的分割,我们需要对每一个特征进行排序。则每层layer的时间复杂度非常粗略地近似 \(O\left(\|\mathbf{x}\|_0 \log n\right)\) : 这是因为,如果对于特征 \(1 \leq i \leq m\) ,每个特征 \(i\) 有 \(\|\mathbf{x}\|_{0 i}\) 非零值,然后,在每一层我们需要排序,且每个特征最多有 \(n\) 个 (即样本为 \(n\) ),因为所有特征的长度为 \(\sum_{i=1}^m\|\mathbf{x}\|_{0 i}=\|\mathbf{x}\|_0\) ,在这种情况下,排序时间不超过 \(O\left(\|\mathbf{x}\|_0 \log n\right.\) )(注:快排的时间复杂度为 \(n \log n\) )。在此基础上,乘以 \(K\) 个树和 \(d\) 层,因此时间复杂度为 \(O\left(K d\|\mathbf{x}\|_0 \log n\right)\) 。
如果我们使用block结构时,在一开始我们就已经对特征进行了排序,不需要在每个节点都排序。正如作者强调的,这时候时间复杂度降到了 \(O\left(K d\|\mathbf{x}\|_0\right)\) ,这是因为,我们对block扫描一遍时就可以得到各个节点的最优切分。再加上一开始排序的复杂度为 \(O\left(\|\mathbf{x}\|_0 \log B\right)\) ,(按照意义,这里 \(B\) 就是 \(n\) )。因此,总时间复杂度为 \(O\left(K d\|x\|_0+\|x\|_0 \log B\right)\) 。
缓存优化
使用Block结构的一个缺点是取梯度的时候,是通过索引来获取的,而这些梯度的获取顺序是按照特征的大小顺序的。这将导致非连续的内存访问,可能使得CPU cache缓存命中率低,从而影响算法效率。
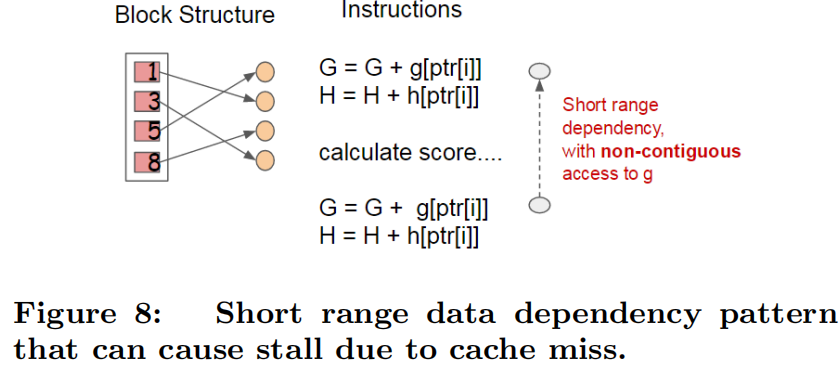
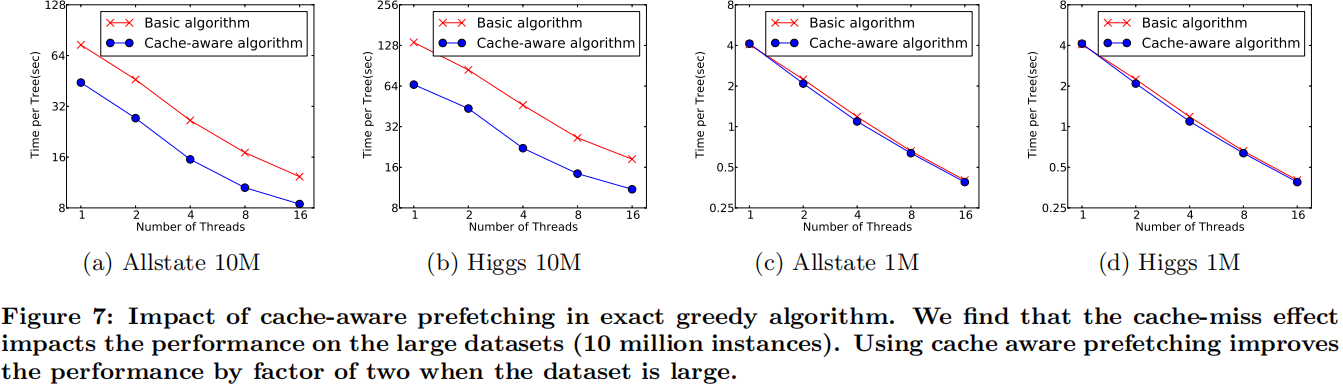
因此,对于exact greedy算法中, 使用缓存预取。具体来说,对每个线程分配一个连续的buffer,读取梯度信息并存入Buffer中(这样就实现了非连续到连续的转化),然后再统计梯度信息。该方式在训练样本数大的时候特别有用,见下图:
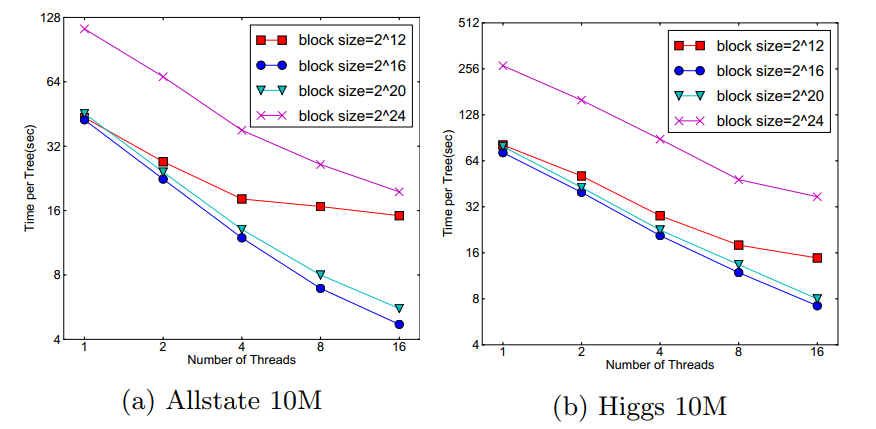
在approximate 算法中,对Block的大小进行了合理的设置。定义Block的大小为Block中最多的样本数。设置合适的大小是很重要的,设置过大则容易导致命中率低,过小则容易导致并行化效率不高。经过实验,发现2^16比较好。
Blocks for Out-of-core Computation
当数据量太大不能全部放入主内存的时候,为了使得out-of-core计算称为可能,将数据划分为多个Block并存放在磁盘上。计算的时候,使用独立的线程预先将Block放入主内存,因此可以在计算的同时读取磁盘。但是由于磁盘IO速度太慢,通常更不上计算的速度。因此,需要提升磁盘IO的销量。Xgboost采用了2个策略:
-
Block压缩(Block Compression):将Block按列压缩(LZ4压缩算法?),读取的时候用另外的线程解压。对于行索引,只保存第一个索引值,然后只保存该数据与第一个索引值之差(offset),一共用16个bits来保存offset,因此,一个block一般有2的16次方个样本。
-
Block拆分(Block Sharding):将数据划分到不同磁盘上,为每个磁盘分配一个预取(pre-fetcher)线程,并将数据提取到内存缓冲区中。然后,训练线程交替地从每个缓冲区读取数据。这有助于在多个磁盘可用时增加磁盘读取的吞吐量。
步长
XGBoost加入了步长 \(\eta\)(有的也叫收缩率Shrinkage),用于防止过拟合
通常步长 \(\eta\) 取值为0.1。当然GBDT也可以采用这个。
行、列抽样
XGBoost借鉴随机森林也使用了列抽样(在每一次分裂中使用特征抽样),进一步防止过拟合,并加速训练和预测过程。
此外,在实现中还有行抽样(样本抽样)。
关于八股
XGBoost 和 GBDT的区别和联系:
- GBDT是机器学习算法,XGBoost是该算法的工程实现。
- 在使用 CART 作为基分类器时,XGBoost 显式地加入了正则项来控制模型的复杂度,有利于防止过拟合,从而提高模型的泛化能力。
- GBDT在模型训练时只使用了代价函数的一阶导数信息,XGBoost 对代价函数进行二阶泰勒展开,可以同时使用一阶和二阶导数。
- 传统的 GBDT 采用 CART 作为基分类器,XGBoost 支持多种类型的基分类器,比如线性分类器。
- 传统的 GBDT在每轮迭代时使用全部的数据,XGBoost则采用了与随机森林相似的策略,支持对数据进行采样。
- 传统的 GBDT没有设计对缺失值进行处理,XGBoost能够自动学习出缺失值的处理策略。
- XGBoost工具支持并行。当然这个并行是在特征的粒度上,而非tree粒度,因为本质还是boosting算法。
XGBoost为什么快
- 当数据集大的时候使用近似算法
- Block与并行
- CPU cache 命中优化
- Block预取、Block压缩、Block Sharding等
XGBoost 防止过拟合的方法
- 目标函数的正则项, 叶子节点数+叶子节点数输出分数的平方和 \(\Omega(f_t)=\gamma T + \frac{1}{2}\sum_{j=1}^{T}{w_j^2}\)
- 行抽样和列抽样:训练的时候只用一部分样本和一部分特征
- 可以设置树的最大深度
- \(\eta\): 可以叫学习率、步长或者shrinkage
- Early stopping:使用的模型不一定是最终的ensemble,可以根据测试集的测试情况,选择使用前若干棵树
本文来自博客园,作者:Un-Defined,转载请保留本文署名Un-Defined,并在文章顶部注明原文链接:https://www.cnblogs.com/EIPsilly/p/18381861

 浙公网安备 33010602011771号
浙公网安备 33010602011771号