
I²C 介绍:
I²C( Inter-Integrated Circuit),中文名称:集成电路总线 ,由飞利浦半导体公司(现恩智浦半导体)在1980年代设计出来的,主要是为了解决嵌入式系统中I/O端口不足的问题,它的优点是可以简化布线和连接多个低速设备,是一种简单、双向、二线制、同步串行总线。
在硬件开发中,I²C 就像一条繁忙的信息高速公路,连接着各个设备,让它们能够高效地交流和协作。
-
I²C总线的硬件连接
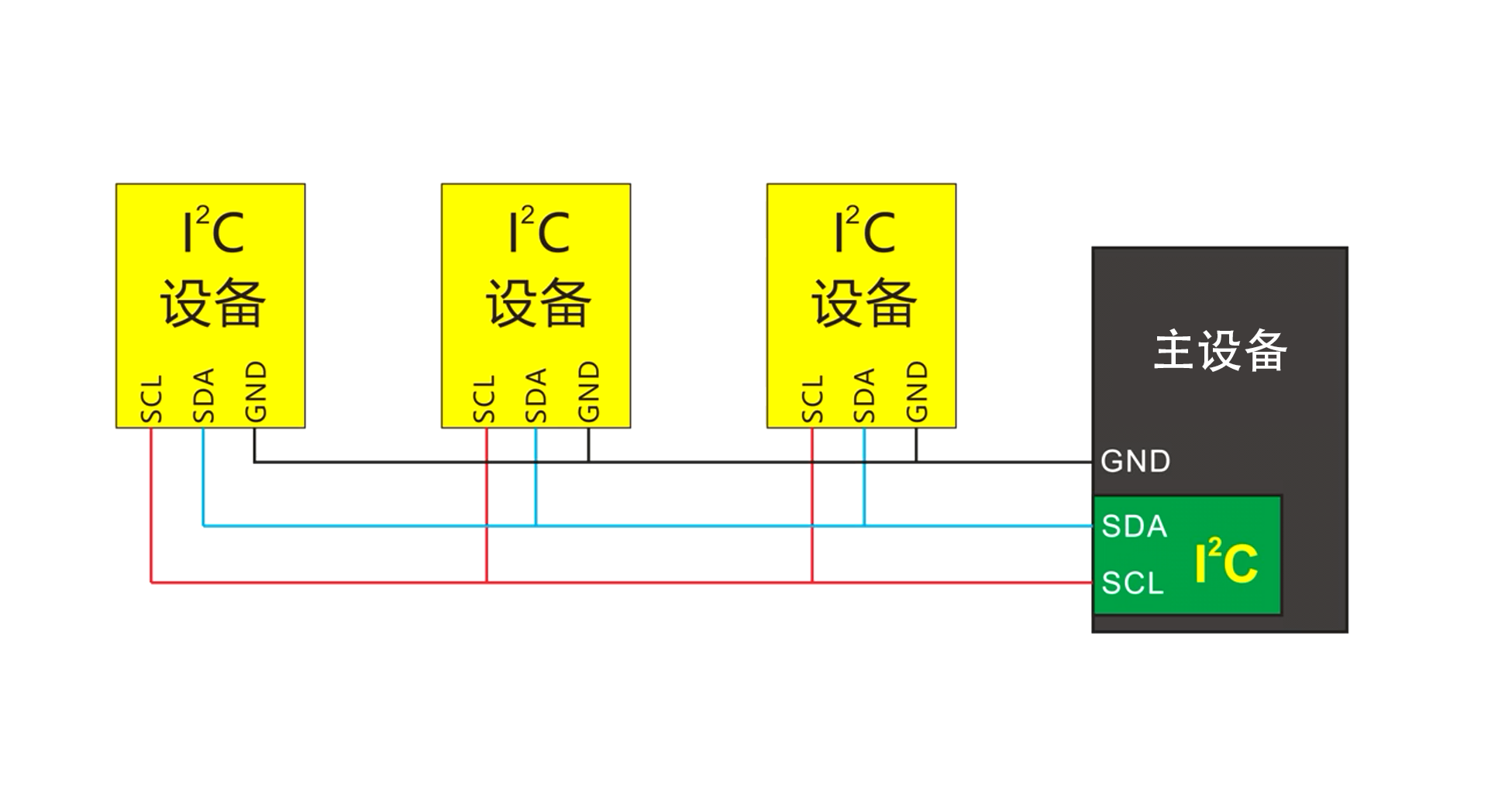
SDA(Serial Data Line):串行数据线 ,用于传输数据。
SCL(Serial Clock Line):串行时钟线 ,用于同步数据传输的节奏。
GND:I²C 总线是板级总线,所有的设备都需要与主设备共地。
I²C 总线的硬件连接就像是搭建一座简单却精巧的桥梁,仅由两根线构成:串行数据线 SDA 和串行时钟线 SCL 。这两根线通过开漏结构连接到各个设备,并配合上拉电阻实现高低电平的稳定输出,空闲时两根线电平均为高电平。
在 I²C 设备中,通常采用 N - MOS 管来控制信号电平,当 MOS 管的栅极(G 极)为低电平时,MOS 管截止,I²C 总线由于上拉电阻的作用呈现高电平;当 G 极为高电平时,MOS 管导通,I²C 总线相当于直接接地,呈现低电平 。总线上的每个设备都有一个唯一的地址,这就好比每个人都有一个独特的身份证号码,设备之间通过这个地址来识别和通信。
-
I²C总线的信号传输
I²C 的输入则是通过 TTL 肖特基触发器将数据传输到输入数据的寄存器中,再提供给处理器进行处理。这种硬件连接方式非常简洁高效,为 I²C 总线的数据传输奠定了坚实的基础。在实际应用中,我们可以看到多个 I²C 设备通过这两根线并联在一起,就像多个节点连接在同一座桥梁上,实现了设备之间的互联互通。
-
I²C的电平标准与特性
I²C 的电平标准较为特殊,由于可能连接不同类型的设备,如 CMOS、NMOS 等,其高电平和低电平的标准并非固定不变 。一般来说,高电平为 0.7VDD(VDD 为电源电压),低电平为 0.3VDD 。这意味着在不同的电源电压下,I²C 的高低电平阈值会相应变化。
I²C 总线具有一个重要的特性 ——“与” 特性。总线上的所有设备的数据线(SDA)和时钟线(SCL)在电气上是 “与” 的关系。也就是说,只要有一个设备将 SDA 或 SCL 线拉低,整个总线的相应线路就会被拉低,只有当所有设备都释放总线,即输出高阻态时,总线才会在被上拉电阻拉高到高电平。这种 “与” 特性在 I²C 总线的仲裁机制中起着关键作用,当多个主设备同时尝试控制总线时,通过 “与” 特性和仲裁规则,可以确保只有一个主设备能够成功占用总线进行数据传输,避免数据冲突问题。
-
I²C的通信模式
I²C 采用多主多从的通信模式,允许多个主机和多个从机同时连接在总线上。主机负责发起和控制数据传输,从机则响应主机的请求。举个例子:在一场演奏会中,主机就像是一个指挥家,掌控着整个通信的节奏和流程。而从机则像是演奏者,按照指挥家的指示进行演奏。
-
I²C的传输速率
在 I²C 总线上,发送的数据是以字节为单位进行传输,每个字节后面都会跟随一个应答位,用于确认数据是否被正确接收。 其数据传输速率在不同模式下传输不同,具体如下:
标准模式(Standard-mode):速率可达 100Kbps(每秒可发送100,000位)。
快速模式(Fast-mode):速率可达 400Kbps(每秒可发送400,000位)。
快速模式+(Fast-mode Plus):速率可达1 Mbps(每秒1,000,000位),这是快速模式的增强版,主要是进一步提高了数据传输速率。
高速模式(High-speed mode):速率为3.4 Mbps(每秒3,400,000位),这种模式适用于需要更高数据传输速率的应用。
超高速模式(Ultra Fast-mode) :速率为5 Mbps(每秒5,000,000位),I2C协议中最快的速率,适用于高速数据传输需求。
多种传输速度可满足不同场景的需求,在实际应用中,I²C 广泛用于连接各种低速外围设备,如 EEPROM、传感器、LCD 驱动器等。比如在智能家居系统中,温湿度传感器、光照传感器等可以通过 I²C 总线将采集到的数据传输给主控芯片,实现环境数据的实时监测和控制;在手机、平板电脑等移动设备中,I²C 也用于连接摄像头、触摸屏等组件,确保设备的正常运行。
-
I²C的传输距离:
I²C总线的传输距离与多种因素有关,在理论上,不考虑干扰、传输速率等因素,I²C 总线的理想传输距离可达 15 米,一般情况下其传输距离较短,通常在几米以内。以下是具体分析:
标准模式:标准模式下,I²C 总线的传输速度通常为 100kbps,此时传输距离一般可以达到 2 米左右。在实际应用中,如果布线合理、干扰较小等,可能会略超过 2 米,但一般不会太长。
快速模式:当 I²C 工作在快速模式时,传输速度可达到 400kbps,此时传输距离一般在 1 米左右。因为随着传输速度的提高,信号的上升沿和下降沿时间变短,信号的完整性容易受到影响,所以传输距离会相应缩短。
高速模式:在高速模式下,I²C 的传输速度可高达 3.4Mbps,此时传输距离通常在几十厘米以内。高速传输时,信号对线路的寄生电容、电感等更加敏感,信号衰减和畸变会比较严重,所以能 保证稳定传输的距离更短。
此外,传输距离还与硬件电路的设计、使用的线材质量、是否有干扰源等因素密切相关。例如,使用质量较好的屏蔽线、合理进行接地和电源去耦设计、减少电磁干扰等措施,都可以在一定程度上延长传输距离,但通常也很难超过 5 米。
如何看懂I²C通信协议时序图?
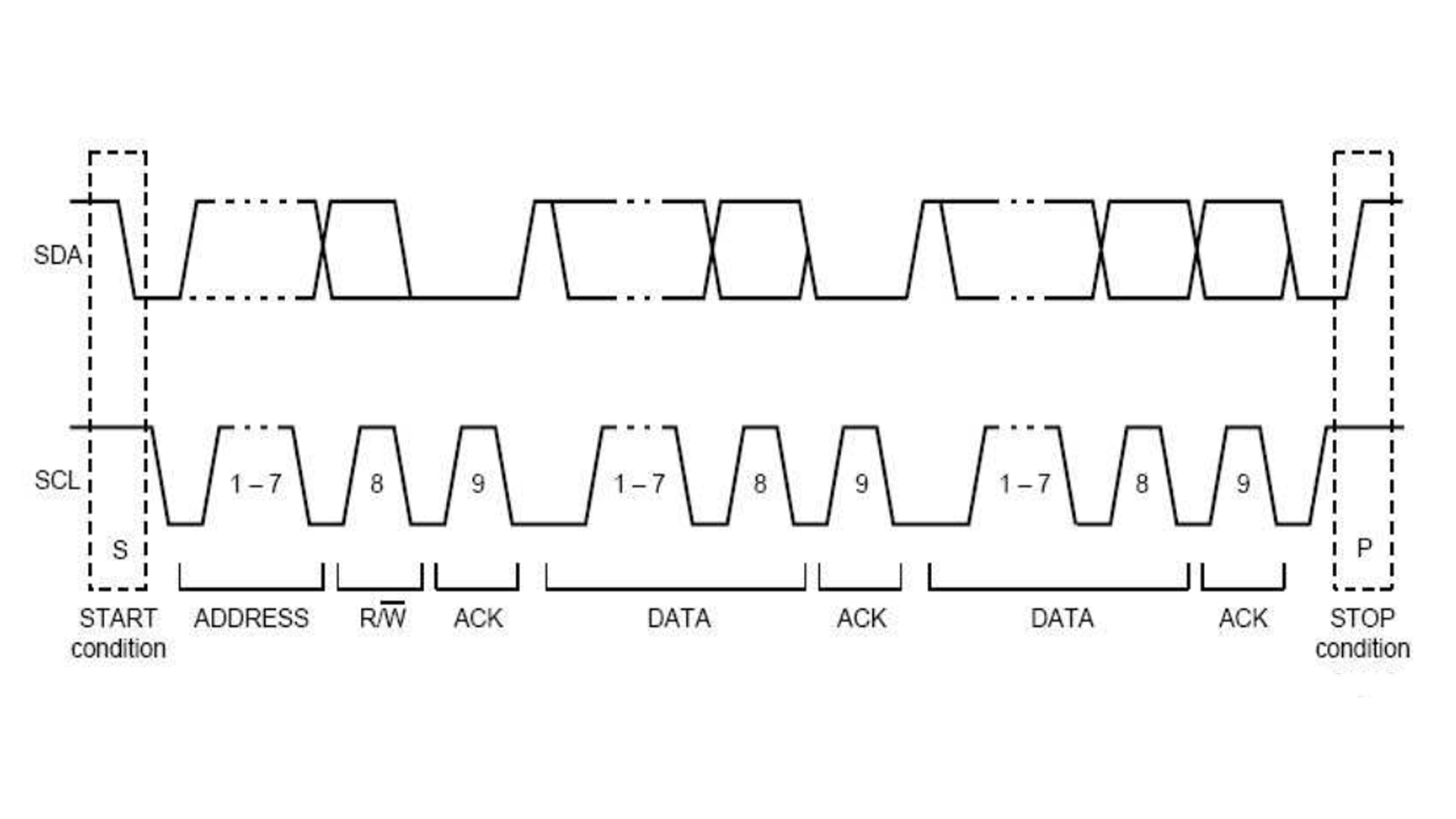
一段完整的I²C时序图顺序如下:
I²C写操作时序:起始位(SCL高电平时,SDA发生跳变,由高电平变为低电平)-->地址位(由发送方发送接收方设备地址,发送第一组数据8位中的前7位表示为设备地址位)-->写操作(由发送方发送读写操作,发送第一组数据8位中的最后1位表示为读写操作:写为:0/读为:1)-->应答信号(接收方收到数据后给发送方一个回应,发送应答信号,ACK:已应答,电平为低电平,NACK:不能应答,电平为高电平)-->指针(也叫寄存器地址。发送方发送完第一组数据并接收到应答后开始发送第二组数据,第二组数据则为寄存器地址位)-->应答信号-->发送数据(发送方发送要写的数据,每发送8位(1个字节)收到1个应答信号,直到全部发完为止。数据为SCL高电平时采集到的SDA数据)-->应答信号~~~~--->结束位(当所有数据发送完后,发送方发送结束位,此时SCL在高电平时,SDA发生跳变,由低电平变为高电平)。
例如:
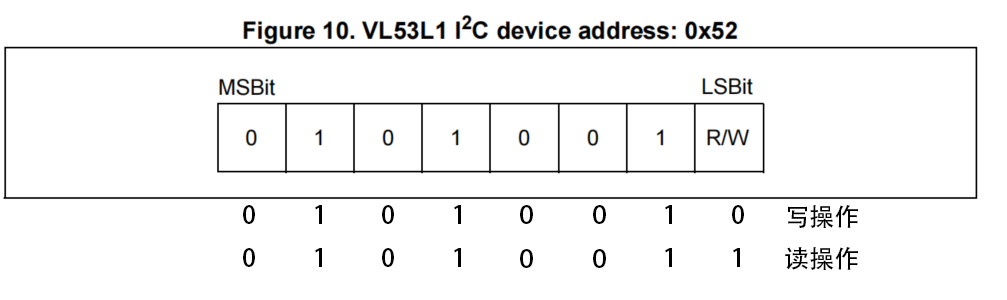
VL53L1 TOF器件
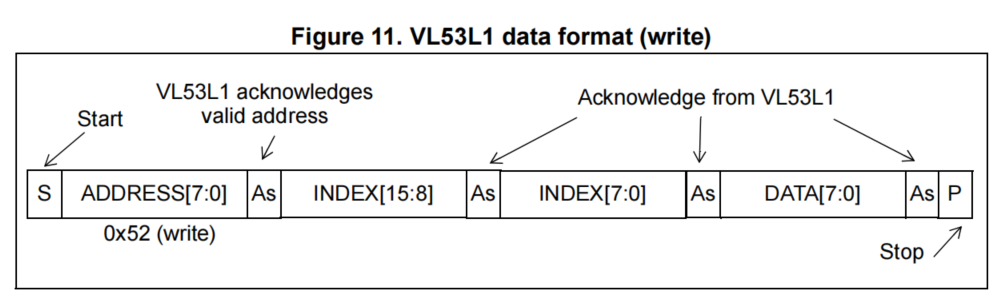
(注:INDEX:表示指针或寄存器地址,As:表示从设备收到ACK应答信号)
I²C读操作时序:I²C读操作前需要先执行一下写操作,主要发送设备地址、写操作位、寄存器地址。起始位-->地址位-->写操作-->应答信号-->指针(也叫寄存器地址)-->应答信号-->结束位-->起始位-->地址位-->读操作<-->应答信号<-->读取数据(读取数据的寄存器地址位是根据写操作的地址位开始读取)<--->应答信号~~~~--->结束位。
例如:
VL53L1 TOF器件
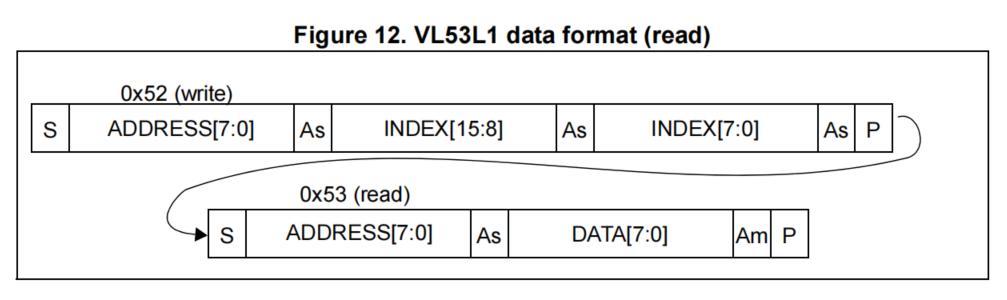
为什么读的地址是0x53而不是0x52(01010010)呢?因为读数据时,当发完写地址和寄存器后再发一次地址时要把第一组数据的第8位写改为读,即0变为1,所以地址就变成0x53(01010011)。
-
起始与停止信号
在 I²C 通信的舞台上,起始信号和停止信号就像是开幕与闭幕的钟声,宣告着通信的开始与结束。
起始信号:
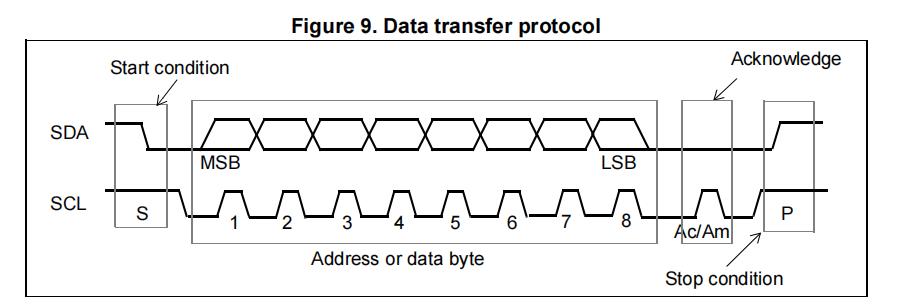
当 SCL(串行时钟线)处于高电平期间,SDA(串行数据线)从高电平向低电平的跳变,这个瞬间被定义为起始信号(Start Condition) 。起始信号如同一声嘹亮的号角,向总线上的所有设备宣告:“通信即将开始,大家做好准备!” 此时,总线上的设备会立即停止当前的其他操作,集中精力准备接收或发送数据。例如,在一个由微控制器和多个传感器组成的 I²C 系统中,当微控制器需要读取传感器的数据时,它首先会发送起始信号,通知传感器准备传输数据。
一句话概括起始位:SCL时钟高电平期间,SDA数据发生跳变,由高电平跳到低电平,则为起始位。
结束信号:
当 SCL 为高电平时,SDA 从低电平向高电平的跳变则表示停止信号(Stop Condition) 。停止信号就像是一曲终了的旋律,意味着本次通信已经结束,总线上的设备可以恢复到空闲状态,准备迎接下一次的通信请求。在上述例子中,当微控制器完成对传感器数据的读取后,它会发送停止信号,告诉传感器通信已经结束,双方可以暂时 “休息”。
一句话概括结束位:SCL时钟高电平期间,SDA数据发生跳变,由低电平跳到高电平,则为结束位。
所有的SDA数据采集都是在SCL为高电平时进行的,SCL为低电平时不采集数据。
-
数据传输格式
在 I²C 总线的数据传输过程中,SDA 上传输的数据就像是一列有序的火车,按照特定的规则行驶。每个字节由 8 位数据组成,传输时先传最高位(MSB,Most Significant Bit),再依次传输低位 。这就好比我们在书写数字时,总是先写高位数字,再写低位数字。例如,要传输数据 0x45(二进制为 0100 0101),在 I²C 总线上会先传输最高位 D7(值为 0),然后依次是 D6、D5…… 直到最低位 D0 。SDA数据传输在SCL为高电平时始终保持在高电平或低电平状态下进行传输,即SCL为高时,SDA要么为高电平,要么为低电平。
-
扩展内容:
在数据传输中,“先传最高位(MSB,Most Significant Bit),再依次传输低位” 是一种数据传输顺序的规定,以下从几个方面来理解:
数据的位表示:
数据在计算机中是以二进制的形式存储和传输的。对于一个二进制数,每一位都有其特定的权重。例如,对于一个 8 位二进制数10101101,从左到右,每一位的权重依次为27、26、25、24、23、22、21、20。这里最左边的位(1)就是最高位(MSB),它对整个数值的贡献最大,因为它代表的权重最高;最右边的位(1)是最低位(Least Significant Bit,LSB),对数值的贡献最小。
传输顺序:
当按照 “先传最高位,再依次传输低位” 的方式进行传输时,就意味着在数据发送过程中,首先发送的是二进制数中最左边的最高位。以刚才的10101101为例,发送方会先将最高位的1发送出去,接着依次发送次高位的0、第三位的1…… 直到最后发送最低位的1。接收方在接收数据时,会按照这个顺序依次接收每一位数据,先收到最高位,然后再按顺序接收后面的低位,最终还原出完整的数据10101101。
I²C 一次通信过程中传输的字节数是不受限制,可以根据实际需求传输多个字节 。每传输完一个字节后,都会紧跟一个应答位(ACK,Acknowledge) 。应答位是接收方对发送方的一种回应,就像是在对话中,一方说完话后,另一方会回应 “我听到了”。当接收方成功接收到一个字节的数据后,会在第 9 个时钟周期将 SDA 线拉低,向发送方发送 ACK 信号,表示 “我已成功接收数据,请继续发送”;如果接收方由于某种原因(如数据错误、接收缓冲区已满等)无法接收数据,它会保持 SDA 线为高电平,发送非应答信号(NACK,Not Acknowledge),告诉发送方 “我无法接收数据,请停止发送或重新发送”。
-
从机地址与读写位
在 I²C 总线上,每个从机都有一个唯一的 7 位地址,这个地址就像是每个设备的 “身份证号码”,用于在通信中标识不同的从机 。主机在与从机通信时,首先要发送一个包含从机地址和读写位的字节。其中,读写位(R/W,Read/Write Bit)占据第 8 位,用于指示本次通信是读操作还是写操作 。当读写位为 1 时,表示主机要从从机读取数据;当读写位为 0 时,表示主机要向从机写入数据 。
例如,假设某个从机的地址为 0x50(二进制为 01010000),如果主机要向该从机写入数据,它会发送的地址字节为 0x50(01010000)与 0(写操作)组成的 0x50(01010000);如果主机要从该从机读取数据,发送的地址字节则为 0x51(01010001) 。通过这种方式,主机可以准确地与总线上的特定从机进行通信,并明确通信的方向。
-
实战应用:硬件与软件的 I²C
1 /**************************************
2 基于 Linux 平台与 BH1750 光照传感器通信
3 代码思路:
4 BH1750 是一款常用的光照强度传感器,通过 I2C 接口与主控设备通信。
5 代码主要实现 I2C 设备的初始化、向传感器发送命令以及读取光照强度数据的功能。
6 ****************************************/
7
8 #include <stdio.h>
9 #include <stdlib.h>
10 #include <fcntl.h>
11 #include <unistd.h>
12 #include <sys/ioctl.h>
13 #include <linux/i2c-dev.h>
14
15 #define BH1750_ADDR 0x23
16 #define BH1750_POWER_ON 0x01
17 #define BH1750_CONTINUOUS_H_RES_MODE 0x10
18
19 // 向 I2C 设备写入一个字节数据
20 int i2c_write_byte(int fd, uint8_t value) {
21 if (write(fd, &value, 1) != 1) {
22 perror("Write failed");
23 return -1;
24 }
25 return 0;
26 }
27
28 // 从 I2C 设备读取两个字节数据
29 int i2c_read_two_bytes(int fd, uint16_t *value) {
30 uint8_t buf[2];
31 if (read(fd, buf, 2) != 2) {
32 perror("Read failed");
33 return -1;
34 }
35 *value = (buf[0] << 8) | buf[1];
36 return 0;
37 }
38
39 // 初始化 I2C 设备
40 int init_i2c(const char *device_path, uint8_t address) {
41 int fd = open(device_path, O_RDWR);
42 if (fd < 0) {
43 perror("Failed to open I2C device");
44 return -1;
45 }
46
47 if (ioctl(fd, I2C_SLAVE, address) < 0) {
48 perror("Failed to set I2C device address");
49 close(fd);
50 return -1;
51 }
52
53 return fd;
54 }
55
56 int main() {
57 const char *i2c_device = "/dev/i2c-1"; // 根据实际情况修改
58 int fd = init_i2c(i2c_device, BH1750_ADDR);
59 if (fd < 0) {
60 return -1;
61 }
62
63 // 开启传感器
64 if (i2c_write_byte(fd, BH1750_POWER_ON) != 0) {
65 close(fd);
66 return -1;
67 }
68
69 // 设置连续高分辨率模式
70 if (i2c_write_byte(fd, BH1750_CONTINUOUS_H_RES_MODE) != 0) {
71 close(fd);
72 return -1;
73 }
74
75 // 等待测量完成
76 sleep(1);
77
78 uint16_t light_level;
79 if (i2c_read_two_bytes(fd, &light_level) != 0) {
80 close(fd);
81 return -1;
82 }
83
84 float lux = light_level / 1.2;
85 printf("Light level: %.2f lux\n", lux);
86
87 close(fd);
88 return 0;
89 }
90
91
92 /********************************
93 代码说明
94 i2c_write_byte 函数:向 I2C 设备写入一个字节的数据。
95 i2c_read_two_bytes 函数:从 I2C 设备读取两个字节的数据,并将其组合成一个 16 位无符号整数。
96 init_i2c 函数:打开指定的 I2C 设备文件,并设置要通信的设备地址。
97 main 函数:初始化 I2C 设备,开启传感器,设置测量模式,等待测量完成后读取光照强度数据并计算光照强度(单位:lux)。
98 *********************************/
硬件 I²C与软件I²C
在实际应用中,I²C 通信有两种实现方式:硬件 I²C 和软件 I²C ,它们各有优劣,就像是不同类型的交通工具,适用于不同的出行场景。
-
(一)硬件 I²C的优缺点
硬件 I²C 是利用芯片内部集成的 I²C 硬件外设来实现通信 。以 STM32 系列微控制器为例,其内部的硬件 I²C 模块包含专门的寄存器和逻辑电路,能够自动生成 I²C 通信所需的时序信号,如起始信号、停止信号、时钟信号等 。这就好比一辆配备了先进自动驾驶系统的汽车,能够自动按照预定的路线和规则行驶。
硬件 I²C 的速度非常快,通信速率可以达到几十 MHz ,能够满足对数据传输速度要求较高的应用场景,如高速数据采集、实时图像传输等 。而且,由于硬件 I²C 是由硬件电路实现,其稳定性和可靠性较高,不容易受到软件干扰和其他任务的影响 。
然而,硬件 I²C 也有一些局限性。它需要占用芯片的特定引脚,这些引脚通常是固定的,不能随意更改 。这就像是一辆只能在特定轨道上行驶的火车,受到轨道的限制。如果这些引脚被其他功能占用,或者需要连接多个 I²C 设备但引脚数量不足,就会面临硬件资源紧张的问题 。此外,硬件 I²C 的配置和使用相对复杂,需要对芯片的寄存器和硬件特性有深入的了解,增加了开发的难度和工作量 。
-
(二)软件 I²C的优缺点
软件 I²C 则是通过软件编程的方式,利用普通的 GPIO(通用输入输出)引脚来模拟 I²C 通信的时序 。以 51 单片机为例,它没有硬件 I²C 接口,但可以通过编写代码控制 GPIO 引脚的电平变化,来模拟 SDA 和 SCL 信号的时序,从而实现 I²C 通信 。这就好比一个人按照地图和导航的指示,自己驾驶汽车到达目的地。
软件 I²C 的最大优势在于其灵活性,它不需要特定的硬件资源,只要有空闲的 GPIO 引脚,就可以实现 I²C 通信 。这使得在一些资源有限的微控制器上,或者需要连接多个 I²C 设备但硬件资源紧张的情况下,软件 I²C 成为了一种可行的解决方案 。此外,软件 I²C 的代码实现相对简单,易于理解和调试,对于初学者来说更容易上手 。
不过,软件 I²C 的速度相对较慢,通信速率一般在几十 kHz 到几百 kHz 之间 ,这是因为软件模拟时序需要占用 CPU 的时间,而且软件执行的速度也受到 CPU 性能的限制 。在数据量较大、对传输速度要求较高的场景下,软件 I²C 可能无法满足需求 。同时,由于软件 I²C 依赖于 CPU 的运行,当 CPU 被其他任务占用时,可能会导致 I²C 通信的延迟或中断,影响通信的稳定性 。
结尾:
I²C 底层逻辑是硬件开发中不可或缺的基础知识,它通过简单的两根线实现了设备之间的高效通信 。从物理基础上的 SDA 与 SCL 信号传输,到通信规则中的起始停止信号、数据传输格式和从机地址读写位,再到实战应用中的硬件 I²C 和软件 I²C 实现方式,每一个环节都紧密相连,共同构成了 I²C 通信的完整体系 。
理解 I²C 底层逻辑,就像是掌握了一把开启硬件世界大门的钥匙,能够让我们更加深入地理解硬件设备之间的交互方式,为解决硬件开发中的各种问题提供有力的支持 。无论是在智能家居、工业控制,还是在移动设备、物联网等领域,I²C 都发挥着重要的作用 。
希望有缘人能通过本文的介绍,能够对 I²C 底层逻辑有更深入的理解和认识。在今后的硬件开发中,灵活运用 I²C 技术,不断探索和创新,将所学知识应用到实际项目中,创造出更多有价值的作品 。如果你在学习过程中有任何疑问或心得,欢迎在评论区留言分享,让我们一起共同进步 。
